,1
Изобретение относится к отрасли железнодорожного транспорта и, в част1ности, к работа м, выполняемым при ка питальном и среднем ремонтах пути.
Известны способы управления рихтующими органами путевых машин и контроль состояния отремонтироваи.ного пути, осуществляемые предварительным измерением натурного состояния пути, например, в «плане, составлением программы сдвижек и иа основании ее постановка пути в и1схадное положение.
Однако при осуществлении этого способа приходится дважды перемещать -путевую мащину по ремонтируемому участку 1пути: сначала для 1непрерывной записи наружного состояния пути, затем для отработки заданной программы по непрерывной сдвижке пути в исходное положение и его контролю. Между первым и вторым (перемещениями путевой мащины производнтся обработка данных замера и составление программы сдвижек, выполняемых вручную.
Целью настоящего изобретения является установление такой последовательности действий, которая бы обеспечила автоматизацию процесса управления и ловыщение точности контроля.
новкой отремонтированного шути в -исходное положение при непрерывном контроле его. Для этого вдоль неотрихтоваяного пути впереди машины юеремещают сочлененные между собой равные друг другу хорды, записывают их взаимное относительное положение в горизонтальной плоскости, характеризующее натурное состояние нути, преобразуют измеренные данные в пронорционалвные импульсы и подают их с опозданием по BpeaieHH, равным продолжительности прохода мащи)ной участка плти в одну хорду, на исполнительный рихтующий орган для о тработки, а с помощью равной одной из первых двух хорд и
сочлененной с ними паследователыно третьей
хорды осуществляют непрерывный контроль
сдвижки отремонтированного пути в исходное
положение.
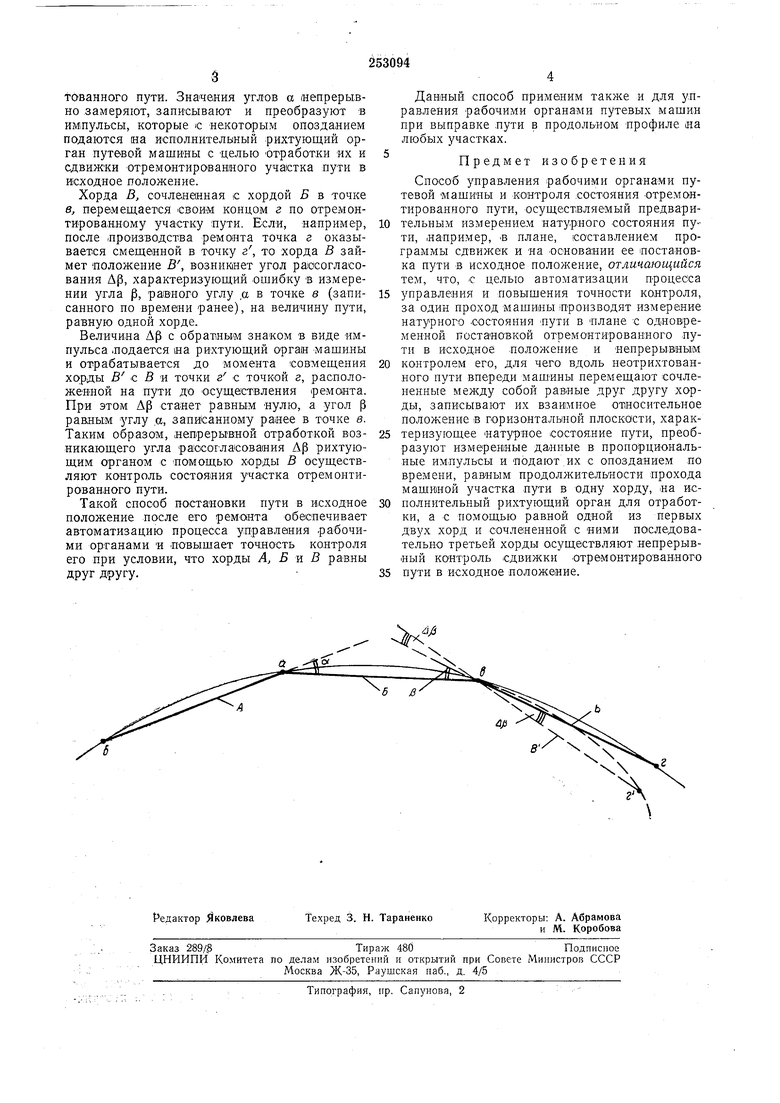
На чертеже изображена схема последовательнрсти расположения хорд, с помощью которых производят замер .натурного состояния неотрихтованного пути в плаие и контроль отработки программы сдвижек пути в исходное положение.
При движении путевой -машины, например, по Криволинейному участку нути, сочлененные в точке а хорды А Б перемещаются концом б вдоль рельсовой нити, при этом угол а, образованный между ними, характеризует их
тованного пути. Значения углов а непрерывно .замеряют, записывают и преобразуют -в иМ|Пульсы, которые с иекоторым опозданием подаются на исполнительный рихтующий орган путевой машины с целью отработки их и сдвижки Отремонтированного участка пути в исходное положение.
Хорда В, сочлененная с хордой Б в точке в, перемещается своим концом г по отремонтированному участку пути. Если, например, после .производства ремонта точка г оказывается смещенной в точку г , то хорда В займет положение В , возникнет угол рассогласования Др, характеризующий ошибку в измерении угла р, равного углу а в точке в (записанного по времени ранее), на величину пути, равную одной хорде.
Величина Др с обратным знаком в виде импульса лодается яа рихтующий орган машины и отрабатывается до момента совмещения хорды В с В и точки г с точкой г, расположенной на пути до осуществления ремонта. При этом Др станет равным нулю, а угол р равным углу ,а, запи)санному ранее в точке в. Таким образом, непрерывной отработкой возникающего угла раюсогласования Др рихтующим органом с ПОМОЩЬЮ хорды В осуществляют контроль состояния участка отремонтированного пути.
Такой способ постановки пути в исходное положение после его ремонта обеспечивает автоматизацию процесса управления рабочими органами и новышает точность контроля его при условии, что хорды А, Б vi В равны друг другу.
Данный способ применим также и для управления рабочими органами путевых машин при выправке .пути в продольном профиле да любых участках.
Предмет изобретения
Способ управления рабочими органами путевой машины и контроля состояния отремонтированного пути, осуществляемый предварительиым измерением натурного состояния пути, например, в плане, составлением программы сдвижек и яа основании ее постановка пути в исходное положение, отличающийся тем, что, с целью автоматизации процесса
управления и повышения точности контроля, за один проход машины производят измерение натурного состояния пути в плане с одновременной постановкой отремонтированного пути в исходное положение и непрерьшным
контролем его, для чего вдоль неотрихтованного пути впереди машины перемещают сочлененные между собой равные друг другу хорды, записывают их взаимное относительное положение в горизонтальной нлоскости, характеризующее натурное состояние пути, преобразуют измеренные данные в пропорциональные импульсы и подают их с опозданием по времени, равным продолжительности прохода маши1ной участка пути в одну хорду, на иснолнительный рихтующий орган для отработки, а с помощью равной одной из первых двух хорд и сочлененной с ними последовательно третьей хорды осуществляют непрерывный контроль сдвижки отремонтированного
пути в исходное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ РЕЛЬСОВ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 1998 |
|
RU2143359C1 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| СПОСОБ РИХТОВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ РИХТОВОЧНОЙ МАШИНОЙ | 1970 |
|
SU279685A1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ И ПРОДОЛЬНОМ ПРОФИЛЕ | 1973 |
|
SU384957A1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| Способ выправки железнодорожного пути | 1989 |
|
SU1705459A1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2002 |
|
RU2226672C2 |
| УСТРОЙСТВО ТУРОВСКОГО ДЛЯ РИХТОВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПО РАСЧЕТУ | 1997 |
|
RU2112104C1 |
| СПОСОБ ТУРОВСКОГО РИХТОВКИ КРИВЫХ УЧАСТКОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1997 |
|
RU2114235C1 |
| Устройство для рихтовки железнодорожного пути | 1983 |
|
SU1112085A1 |
