Известны автооператоры с поворотньш и поступательно перемещающимся захватным органом, имеющие ось поворота рычага (механической руки), расположенную перпендикулярно оси шпинделя станка.
Предлагаемый автооператор отличается тем, что он выполнен в виде подпружиненной в осевом направлении штанги, размещенной внутри полого распределительного вала и взаимодействующей с рычажным зубчато-реечным механизмом. На рейку механизма воздействует торцовый цилиндрический кулачок, приводимый в движение от распределительного вала, на котором укреплен другой кулачок. Согласованно с первым он воздействует на зубчатый сектор, находящийся в зацеплении с зубчатым колесом поворота штанги, посаженным на нее с возможным перемещением штанги в осевом направлении относительно этого зубчатого колеса. Это позволяет освободить зону обработки, а также увеличить надежность работы автооператора.
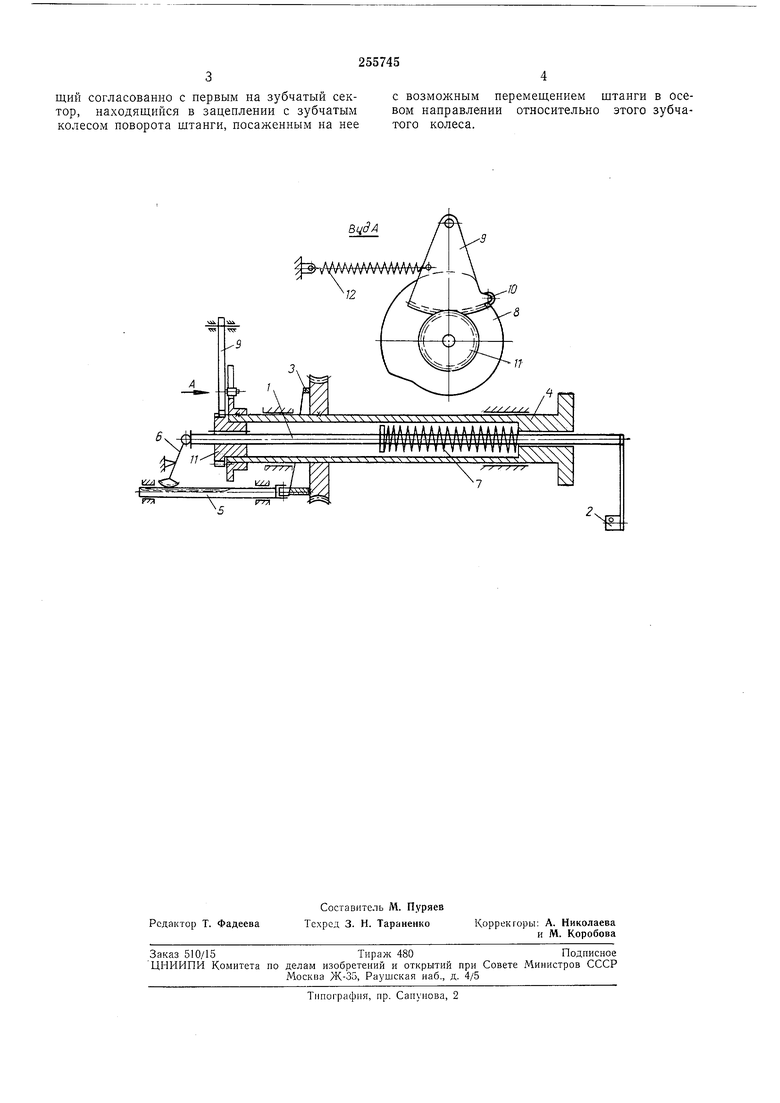
На чертеже схематически представлен предлагаемый автооператор.
Возвратно-поступательноеперемещение
щтанги / с «рукой 2 осуществляется от торцового цилиндрического кулачка 5, жестко связанного с полым валом 4 суппорта через толкатель 5 и сектор б. Возврат в исходное
положение происходит под действием пружины 7.
Поворот штанги осуществляется от кулачка 8 через зубчатый сектор 9 с роликом 10 и шестерню П, которая связана со штангой / шлицевым соединением. Возврат в исходное положение происходит под действ}1ем пружины 12.
Съем обработанной детали со шпинделя и выброс в лоток осуществляется тем же автооператором или, в целях сокращения времени холостых ходов, отдельным автооператором, аналогичным по принципу действия и конструкции, смонтированным во втором суппорте или распределительном валу.
Предмет изобретения
Автооператор, в частности для станков с вращающимися суппортами, в котором захватный орган совершает поступательное движение и поворот, отличающийся тем, что, с целью освобождения зоны обработки, он выполнен в виде подпружиненной в осевом направлении штанги, размещенной внутри полого распределительного вала и взаимодействующей с рычажным зубчато-реечным механизмом, на рейку которого воздействует торцовый цилиндрический кулачок, приводимый п двийчение от распределительного вала, на котором укреплен другой кулачок, воздействую3щий согласованно с первым на зубчатый сектор, находящийся в зацеплении с зубчатым колесом поворота щтанги, посаженным на нее 4 с возможным перемещением штанги в осевом направлении относительно этого зубчатого колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1985 |
|
SU1283035A1 |
| Станок для обработки сферических поверхностей колец подшипников качения | 1983 |
|
SU1110547A1 |
| ОДНОШПИНДЕЛЬНЫЙ АВТОМАТИЧЕСКИЙ ТОКАРНО-РЕВОЛЬВЕРНЫЙ СТАНОК | 1949 |
|
SU91305A1 |
| Автооператор | 1969 |
|
SU344701A1 |
| Устройство для обработки кулачков | 1970 |
|
SU478690A1 |
| Автомат для изготовления электрических катушек | 1973 |
|
SU474859A1 |
| Резьбонарезной станок | 1981 |
|
SU990447A1 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА, СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ И ИНСТРУМЕНТ ДЛЯ ЕЁ ВЫПОЛНЕНИЯ | 1998 |
|
RU2200262C2 |
| Устройство для автоматической смены инструмента | 1977 |
|
SU657954A1 |
| АВТОМАТ ДЛЯ ШЛИФОВАНИЯ КАНАВОК И СПИНОК СВЕРЛ | 1971 |
|
SU295650A1 |