Изобретение относится к транспортной технике, а именно к орицепным захватным устройствам для транспортировки грузов, например форм для железобетонных изделий, и быть использовано на предприятиях строительной промышленности.
Известны автоматические захватные устройства, содержащие траверсу, раму с иодвижными В 1горизонтальном направлении захватами и механизм фиксации .положения траверсы относительно рамы.
В известных устройствах для транспортирования грузов различных размеров требуется ручная перестановка захватов .в соответствии с габарита-ми грузов.
Цель изобретения - обеспечить транспортировку /грузов различных размеров.
Это достигается тем, что захваты попарно соединены между собой канатами, запасованными на два расположенные один над другим полиспаста, неподвижные блоки -которых закреплены на раме, а подвижные - на траверсе.
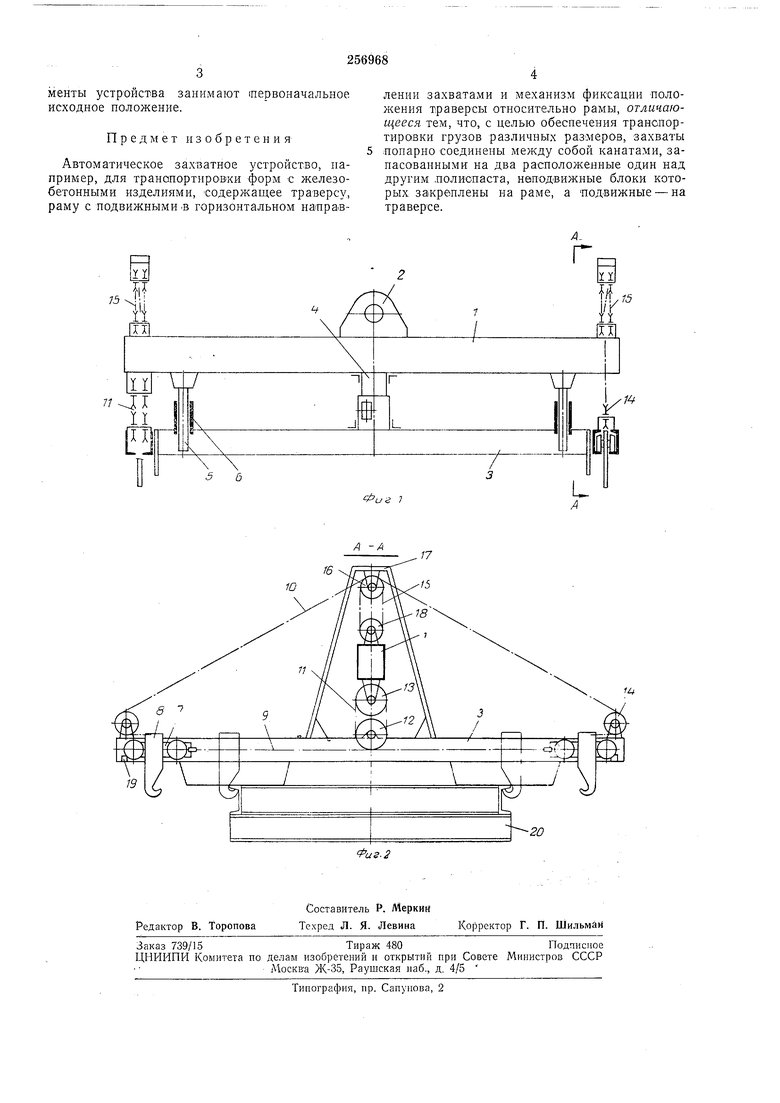
На фиг. 1 схематически изображено описываемое устройство, вид опереди; на фиг. 2- сечение по А-А по фиг. 1.
Устройство содержит траверсу / с грузовой серьгой 2 и раму 3, которые связаны мел-;ду собой механизмом 4 фиксации, направляющими пальцами 5 и втулками 6. На раме 3с помощью Катковых тележек 7 установлены захваты 8. Тележки соединены между собой попарно канатами 9 и 10. При этом канат 9 запасован на полиспасте //, неподвижные блоки 12 которого закреплены на раме 3, а подвижные 13 - на траверсе I. Канат 10 огибает отводные блоки 14, установленные на раме 3. Канат W запасован на полиспасте 15, неподвижные блоки 16 когорого закреплены на стойке 17 рамы 3, а подвижные блоки IS - на траверсе 1. Для огран чения передвижения тележек 7 на раме 3 установлены упоры 19. Работает устройство следующим образом. В исходном состоянии без груза траверса / занимает промежуточное полол ение и заф:1ксирована механнзмом 4, а захваты 8 раздвинуты, но не доходят до упоров 19. При установке устройства на форму 20 рама 3 упирается в нее, а траверса / продолжает движение вниз. При этом блоки полиспаста // сближаются, а блоки полиспаста 15 раздвигаются, за счет чего захваты 8 доходят до упоров 19. При дальнейщем подъеме рама 3 первоначально остается неподвижной, а траверса 1 за счет автоматического переключения механизма 4 поднимается до тех пор, пока захваты 8 не упрутся в форму 20. Затем все устройство вместе с формой 20 поднимается и транспортируется к месту укладки. Укладка груза производится в обратном порядке, после чего эле
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1973 |
|
SU491577A1 |
| Захватное устройство для труб | 1982 |
|
SU1065326A1 |
| Портальный кран | 1977 |
|
SU683988A1 |
| Грузоподъемное устройство | 1989 |
|
SU1689300A1 |
| Грузозахватное устройство | 1986 |
|
SU1439067A1 |
| Башенный кран | 1978 |
|
SU775043A1 |
| ГРУЗОВАЯ ТЕЛЕЖКА МОСТОВОГО КРАНА | 1973 |
|
SU420541A1 |
| Стреловой кран с передвигающейся по стреле тележкой | 1957 |
|
SU110903A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Захватное устройство для труб | 1982 |
|
SU1178680A1 |
