Предметом изобретения являечся следящее устройство для регулирования ускорения и замедления реверсивного стана холодной прокатки, содержащее командный аппарат с функциональным потенциометром, напряжение которого, соответствующее задаваемой скорости, сравн вается с напряжением тахогенератора, пропорциональным действительной скорости моталки. Разность этих напряжений воздействует на обмотку электромашинного усилителя, питающего серводвигатель плоского контроллера, который в свою очередь управляет напряжением генераторов, питающих прокатный двигатель и двигатели моталок.
Отличительной особенностью сипсываемого устройства является механическая связь функционального потенциометра командного аппарата с валом моталки, в результате чего регулировка скорости во время разгона и тормолсения стана производится в функции длины конца полосы, наматываемой на моталку во время разгона или сматыг.аемой с мотаД5 -5 в процессе торможегнш.
Подобным вынолнением следящего устройства достигается сокращение времени переходного процесса.
Для управления электрическими Щ.пямн точной остановки стана в командном аппарате следящего устройства применен путевой переключатель, набранный из контактных шайб.
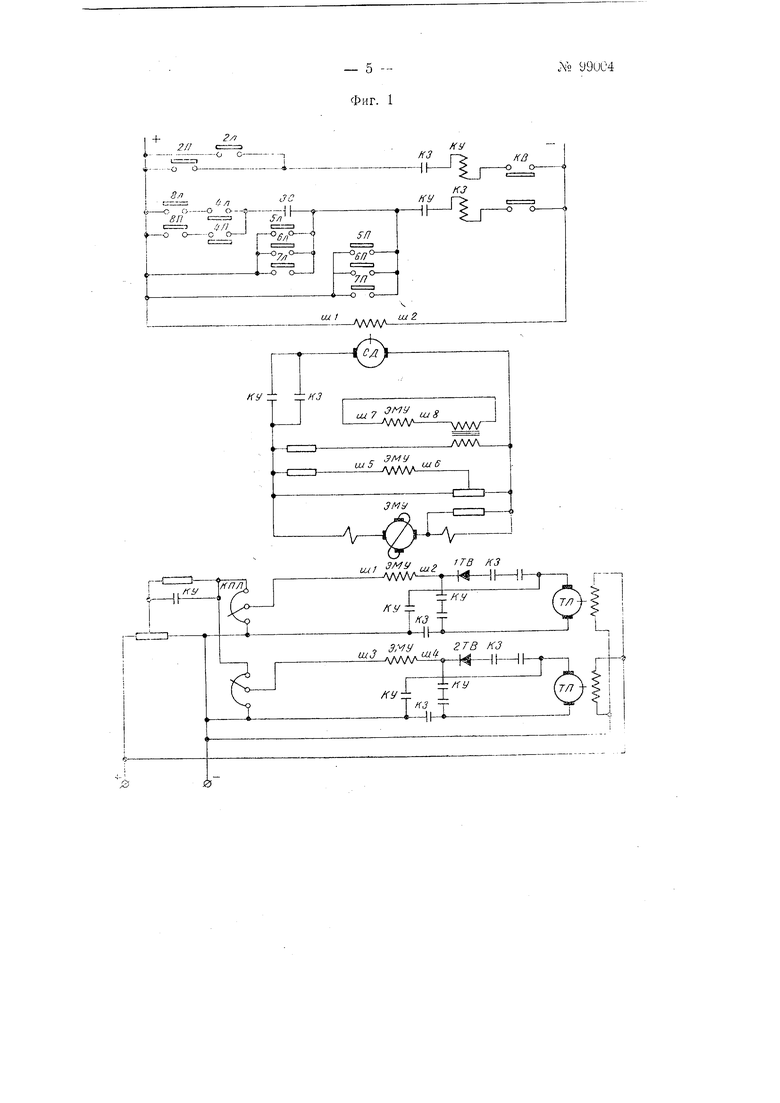
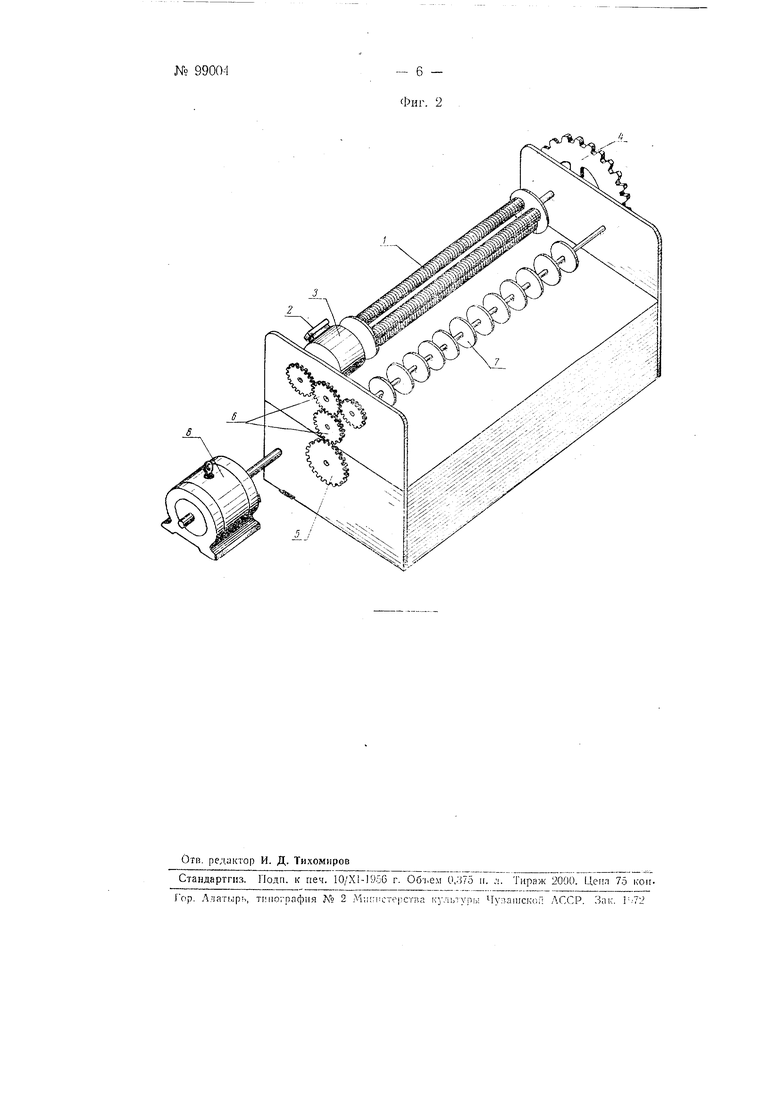
На фиг. 1 изображена принципиальная электрическая схема следящего устройства; на фиг. 2-общий вид командного устройства.
Принцип работы следящего устройства заключается в следующем.
Длина конца полосы, разматываемой с барабана моталки в процессе торможения или наматываемой на ютг1лку в процессе-разгона:
t,
„ V
где V-линейная скорость барабана моталки перед началом тормо ;ония либо конечная линейная скорость барабана моталки после окон-.ання разгона; 1-время разгона или торможеиня. ПРИ постоянном значении величи ;ьг ускорения или зг медле1шя скор(;сть вращения двигателя моталки (в об/1мин.):п «t, где а-постоянное значение величины углового ускорения (с размерностью об/мин./сек.). Поскольку в этом случае v про юрциомально п, А п- или где А-постоянная величина. Следящее устройство, осуществляющее регзлирование скорости ведущей моталки, а следовательно, и стана, непосредственно в функции пути разгона или торможения, т. е. Б функции длины полосы, наматываемой на моталку при разгоне нли сматываемой с моталки при торможении, должно поддерживать jioс-тоянныАГ соотнощение п фемя изменения скорости. Для этого обе зависимые переменные п и S должны быть выражены посредством сравниваемых электрических неличин. В предлагаемом устройстве это вынолняется следующим образом. Скорость вращения двигателя моталки п с помощью тахогенератора, установленного на валу двигателя моталки, преобразуется в э.д.с. тахогенератора Ет С,- п,где С,- ко ффициент пропорциональности. Функциональная зависимость конца длины полосы 1/ преобразуется А г напряжение на выходе функционального потенциометра, механически связанного через редуктор с валом барабана моталки. Оба указанных напряжения включаются встречно на вход системы регулирования (одну из задающих об.моток ЭМУ: ш1Ш2 либо ai3-tu4. При этом напряжен не, снн.маемос е потенциометра, яв.шется эталонным. Таким образом, на вход следящей системы регулирования подается разность этих напряжений, пропорциональная разности между действительным мгновенным значением длины конца полосы на моталке (падение напряжения на потенциометре) н потенциальной длиной конца полосы, соответствующей сравниваемому .мгновенному значению скорости моталки (э.д.с. таходатчика). Электромашинныйусилитель ЭМУ здесь используется в качестве генератора, нитающего серводвигатель СД плоского контроллера. Поэтому небольшое рассогласование нанряжений сравнения усиливается э.яектромащинным усилителем, устанавливающим соответствующую скорость вращения серводвигателя СД плоского контроллера, а следовательно, и скорость перемещения траверсы и интенсивность изменения напряжения генераторов, питающих прокатный , двигатель и двигатели моталок стана. Задающий элемент системы, выражающий в виде эталонного напряжения сравнения фз кциональную зависимость длины конца полосы на барабане моталки, выполнен в виде коллекторного функциоггального потенциометра (фиг. 2) с секциями сопротивлений / и с одни.м неподвижным щеточным токосъемником 2, расположенным на коллекторе 3. Коллекторный потенцно.метр является одной частью ко.мандного устройства, обеспечивающего выполг ение заданного закона регули sг п., -т- /.Второй частью рования чА / является набор контактных щайб обычного путевого выключателя, производящих включеиие контакторов КУ и КЗ автоматики, сигнализацию работы или готовности устройства, отсчет числа пропусков при прокатке с отходами, а также точную остановку стана на заправочной скорости. Функциональный потенциометр и контактные нтайбы, установленные в одном корпусе, составляют комаггдное устройство (фиг. 2). Командное зстройство связано с вало.м барабана моталки посредством электромагнитной .муфты и редуктора с входной щестерней 4 и выходной щестерней 5, от которой через паразитные щестерни 6 одновременно приводятся во вращение функциональный потенциометр и набор контактных шайб 7. В случае зз.медления стана электромагнитиая муфта подключает командное устройетво к валу задней моталки, когда на ее барабане остаметея нееколько витков. Число оставшнхея на моталке внтков должно еоответствовать передаточному чнслу редуктора, так как при разл атываннн оставшнхея внтков функцнональный потенцнометр должен совершнть однн оборот.
Во время разгона етана в еледуюН1,ем нронуекс, когда задняя моталка етановитея на штываюнхей, эле1 тромагинтная муфта отключит командное устройство от вала моталки носл того, как на ее барабан будет намотано соответствующее число витков.
Для возврата командного устройства в неходное положение служит двигатель 8 возврата, который включается во время первого прохода новой полоеы.
В данном следянхем устройстве предусмотрено два командных поста и два редуктора с электромагнитными муфтамн соответственно для правой и левой моталок.
Процесс регулирования неустановившихся режимов протекает следуюш,им образом.
Процесс разгона стана при левой иаматываюнтей моталке начинается включением контактора ,/(У (фиг. 1) и подачей небольшого начального напряжения на выходе функционального потенциометра КПЛ для того, чтобы возбудить электромашинный усилитель.
Серводвигатель СД плоского контроллера начинает врапдаться, перемеш,ая траверсу плоского контроллера вверх. Если интенсивность разгона стана будет больию требуемой, т. е. 1анряжсние тахогенератора левой моталкн ТЛ будет прнб.тнжаться но величине к значению надення напряжения на выходе функционального нотеициометра КПЛ, то это вызовет уменьшение задаюш,их ампервитков в обмотке ЭМУ ш1ш2, снижение скорости вращения серводвигателя плоского контроллера и уменьшение иитенсивноетн разгона етана. Такое состоянне будет продолжаться до наступления динамического равно15есия системы, когда задающие амнервитки возрастут до требуемой величины.
Аналогично система реагирует и на уменьшении интенсивностн разгона, непрерывно под.а,ержнвая заданную ннтеисивиость и врфш разгона, пропорциональное конечной скорости.
По достижении траверсой илоского контроллера верхнего положения конечный выключатель KB отключит контактор КУ и остановит траверсу-разгои стана закончен. При этом комаидиое устройство автоматически отключится, останавливая коллекторный потенциометр в положении, соответствующем иаибольн.ему напряжению, подготавливая тем самым моталку к разматыванию. Одиовремегню контактная шайба 2л отключает цепь питания катущкн контактора КУ.
В процессе торможения стана при правой разматывающей моталке вступает в действие ее командное устройство. По мере разматывания полосы с правой моталки электромагнитная муфта включает командное устройство правой моталкн. При этом замыкается контактная шайба 8П, включая контактор КЗ автоматичеекого замедления. Контактор КЗ включает цени сравпення задающей обмотки ЭМУ шЗ-ш4 н подключает серводвнгатель плоекого контроллера к якорю ЭМУ. Благодаря запирающему действию выпрямителя 2ТВ ток по обмотке шЗш4 протекать не будет. По мере дальиеЙ1него разматывання нолосы коллекторный потенциометр будет вращаться в сторону уменьшения нотенциала. Одиовременно с этим нродолжает возрастать скорость вращен11Я двигателя моталкн и э.д.с. TaxorcHeppiTopa ГЯ, вследствие чего разность напряжений нотегщнометра н тахогенератора вследетвнс сближеиия их величин продолжает убывать до нуля. Затем напряжение тахогенератора ТП становится больше напряжения потенциометра, создавая возрастание напряжения на якоре серводвигателя. Когда напряжение на якоре серводвигателя возрастет до иапряжения трогания. последний начинает разгоняться, иерс:меИ1ая траверсу плоского контроллера вниз. Этот момент будет соответствовать требуемому пути замедления моталки (длине; конца полосы на барабане моталки) при замедлении с данной скорости врсшдсния с заданной постоянной И1теисивностью торможения.
Таким образом, система автоматически избирает момент начала замедления (путь замедления), соответствующий истинной скорости вращения двигателя разматывающей моталки при любом обжатии металла в валках стана. При этом следящее устройство поддерживает постоянную нитенсивиость торможения аналогично тому, как поддерживалась постоянной И1гтенсивг1ость разгона.
Когда скорость стана (тся до величины скорости заправки, вкл очится реле заправочной скорости ЗС, нормально закрытый контакт которого отключит контактор КЗ автоматического замедления. Серводвигатель плоского контроллера окажется отключенным от якоря ЭМУ и включенным нл контур динамического торможения, останавливая траверсу. При этом стап будет продолжать работать иа заправочной скорости до тех ио), иока одна из щайб 5Я-717, точной остя,новки, соответственно номеру произска 1, 3 или 5-му, снова не включит контактор К.З, в результате чего серводвигатель плоского контроллера возвратит траверсу в исходное положение- останавливая стаи с точностью до 0,1 м.
Процесс регулироваиия разго 1а и торможения стана для случая правой наматывающей моталки к раз;иатываюн1,ей моталки происходит аналогично описанному вынте, с том липль отличием, что во время разгона вступает в действие правое командное устройство и Taxojeneратор ТП, а во время торможения- левое командное устройство и тахо.генератор ТЛ.
Для ведения автоматического режима уекорения и в последнем пропуске па ведущем валу командного устройства (фиг. 2) установлен двигатель 8 возврата, с помощью которого командное устройство быстро возвращается в исходное рабочее положение во время первого прохода прокатки нового рулона, когда задняя моталка отключена и. не участвзет в работе.
В первом нропуске, нри размотке полосы с разматывателя, замедление стана до заиравочной скорости производится оператором с помощью ручного управления плоским контроллером. При этом скорость перемещения траверсы плоского контроллера должна быть выбрана равной средн(й скорости перемещения траверсы в автоматических режимах.
П р е л, м е т и з о б р е т е н и я
1.Следящее устройство для регулирования ускорения и замедления реверсивного стаиа холодной прокаткн, содержащее команд11ЫЙ аппарат с фуикцнональным потенциометром, напряжение которого, соответствуюнхее задаваемой скорости, сравнивается с напряжением тахо1енератора, пропорциональным действительной скорости моталки, а |зазность этих напряжений воздействзет на обмотку электромащинного усилителя, рстз лирующего скорость враще1Н1я двигателей моталок, о т л и чающееся тем, что, с целью сокращения времени переходного процесса, функциональный иотенцио.метр командного аппарата механически связан с валом моталки.
2.В командном аппарате следящего устройства, охарактеризоваиного в н. 1, применение набора контактных 1найб, образующнх иутевой иереключатель и управляющих элсктрнчески.ми ценями точной остановки стана.
- 5 JN У9иС4 Фиг. 1 Lut ЗМУ 2 ТВ КЗ ЛМЛД НII 1Ь-Г
№ 99004
g
(нг. 2