Известны загрузочно-разгрузочные устройства, содержащие смонтированные на основании неподвижные и подвижные приводимые в движение гидроцилиндрами направляющие с закрепленными на них призмами для размещения деталей. Ь известных устройствах подвижные направляющие приводятся в движение несколькими приводными элементами, это усложняет конструкцию устройства.
Предложенное устройство отличается тем, что подвижные направляющие установлены на подпружиненных щтырях, расположенных в отверстиях кареток, одна из которых соединена со щтоком гидроцилиндра, установленного на другой каретке. Неподвижные направляющие этих устройств снабжены подпружиненными поворотными копирами.
Указанные отличия упрощают конструкцию предложенного устройства.
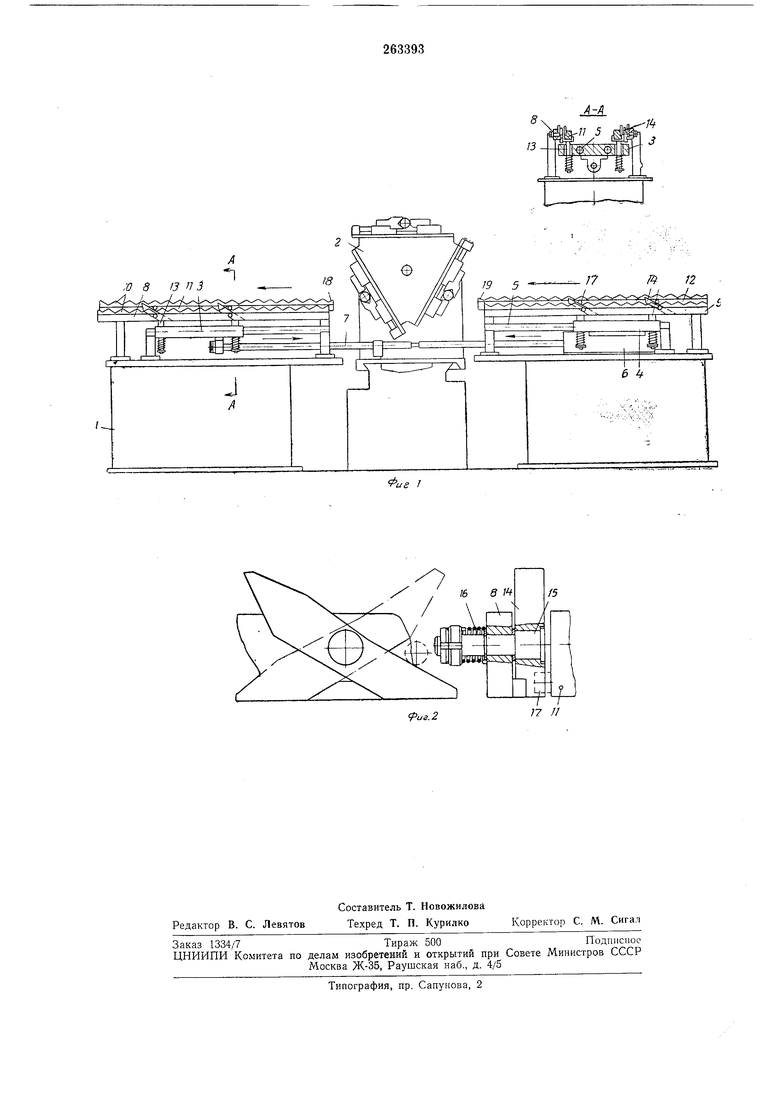
На фиг. 1 изображено предложенное загрузочно-разгрузочное устройство; на фиг. 2 - схема установки поворотных копиров.
Предлагаемое загрузочно-разгрузочное устройство состоит из основания 1, барабана 2, кареток 3 и 4, перемещающихся по горизонтальным направляющим 5, гидроцилиндра 6,
креплены призмы 10 служащие для размещения деталей, подвижных направляющих 7У и 1, неподвижно закрепленных на подпружиненных щтырях 3, которые имеют возможность перемещаться в вертикальном направлении в отверстиях кареток 3 и 4. Кроме то10, устройство состоит из подпружиненных копирив v, поворачивающихся на осях ю, закрепленных в неподвижных направляющих Бизвратных пружин ;о и роликов /, оси которых жестко закреплены в корпусе подвижНо1 направляющих.
оагрузочно-разгрузочное устройство работает следующим ооразом.
оараоан 2, поворачиваясь вокруг своей оси и останавливаясь в фиксированном положении, подводит тиски с оораоотаннои деталью к позиции выгрузки, а свооодные от детали тиски - к позиции загрузки, ь это время каретки 3 н 4 находятся в крайнем отведенном
положении, а детали размещены на призмах W неподвижных нанравляющих. Копиры i4 направлены в одну сторону как на загрузочных неподвижных направляющих 9, так и на разгрузочных 8. Направление поворотных копиров выбирается в зависимости от положения позиций загрузки и выгрузки. Порщень гидроцилиндра, закрепленного неподвижно на каретке 4 и соединенного с кареткой 3 при помощи щтока 7, находится в исходном положуНИИ (влево по фиг. 1), При иоступлеиии в гидроцилиндр масла начинается перемещение штока 7 и гидроцилиндра, а соответственно и кареток по направляющим 5. Вследствие того, что копиры направлены в одну сторону, подвижные направляющие 11 и 12, крайние призмы 18 и 19 которых подпружинены и способны смещаться в вертикальном направлении, находятся ниже неподвижных направляющих 5 и Р. В начальный момент движения ролики 17, закрепленные на разгрузочных подвижных направляющих 12, проходят под копирами (см. фиг. 2), не создавая большого сопротивления горизонтальному перемещению каретки 3 и позволяя подвижным направляющим // переместиться в зону выгрузки и подойти под обработанную деталь, зажатой в тисках барабана. Ролики 17, закрепленные на загрузочных подвижных направляющих 12, катясь по поверхности копиров 14 и создавая вертикальное перемещение подвижных направляющих 12 вместе с размещенными деталями, оказывают большое сопротивление горизонтальному перемещению каретки 4, которая начинает двигаться только после останова каретки 3, перемещая все детали на один шаг в сторону загрузки, и подводит подвижные направляющие 12, а соответственно и деталь к тискам барабана 2, находящегося в загрузочной позиции. Поступает команда на зажим тисков, находящихся в загрузочной позиции и на разжим тисков - в разгрузочной позиции, после чего масло подается в другую полость гидроцилиндра, порщень которого начинает перемещаться в обратном направлении, перемещая каретки в том же направлении. Теперь каретка 4, а соответственно и загрузочные подвижные направляющие 12 первыми возвращаются в исходное положение, так как ролики 17, закрепленные на подвижных направляющих 12, проходят под копирами 14, не оказывая значительного сопротивления горизонтальному перемещению каретки
4. После останова каретки 4 начинает двигаться каретка 3 вместе с подвижными направляющими 11, ролики 17 которых, катаясь по поверхности копиров 14, создают подъем этих направляющих вместе с размещенными
на них деталями, перемещая обработанную деталь с позиции выгрузки, и детали, лежащие на подвижных направляющих П, на один щаг от этой позиции.
Предмет изобретения
Загрузочно-разгрузочное устройство, содерл ащее смонтированные на основании неподвижные и подвижные приводимые в движение
гидроцилиндром направляющие с закрепленными на них призмами для размещения деталей, отличающийся тем, что, с целью упрощения конструкции, подвижные направляющие установлены на подпружиненных щтырях,
расположенных в отверстиях кареток, одна из которых соединена со штоком гидроцилиндра, установленного на другой каретке, а неподвижные направляющие снабжены подпружиненными поворотными копирами.
JLL
77 5
U-i-U /2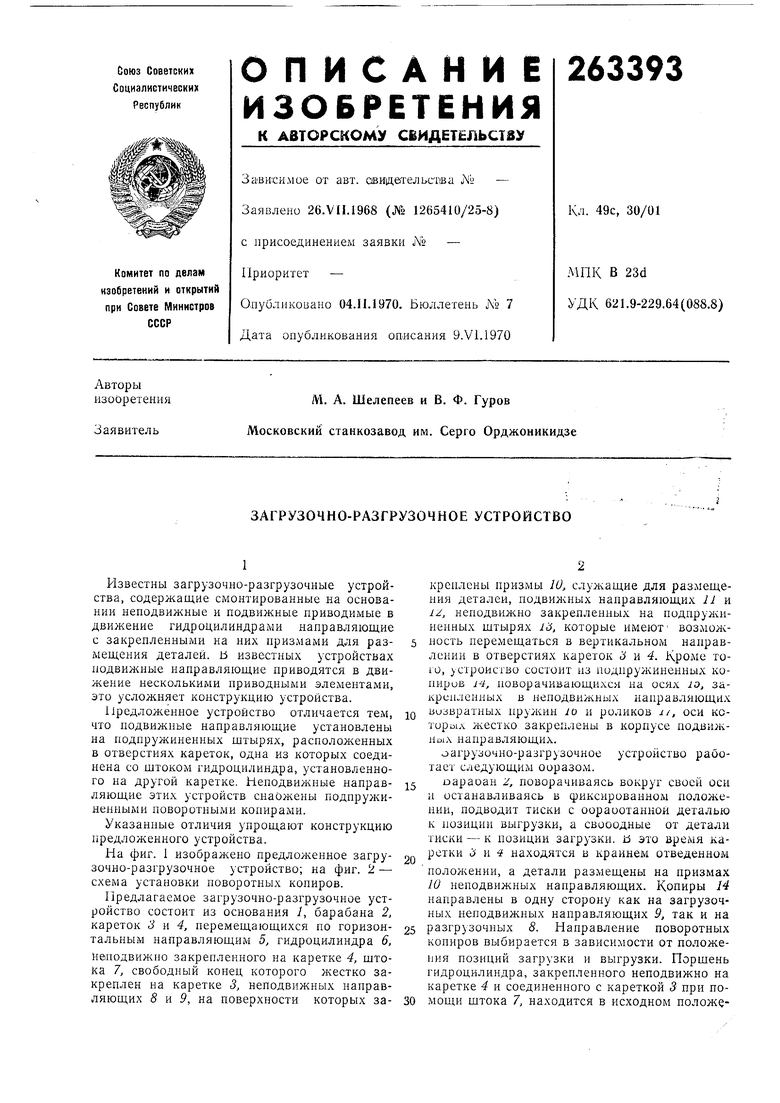
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство | 1970 |
|
SU318263A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| СТАНОК ДЛЯ СУПЕРФИНИШНОЙ ОБРАБОТКИ КОЛЕЦ | 1992 |
|
RU2033916C1 |
| Автоматическое загрузочно-разгрузочное устройство к горизонтальному поворотному столу | 1981 |
|
SU963802A1 |
| Загрузочно-разгрузочное устройство к горизонтальному поворотному столу | 1984 |
|
SU1180226A1 |
| АГРЕГАТ ДЛЯ ЗАКАЛКИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1972 |
|
SU330203A1 |
| Загрузочно-разгрузочное устройство прокатной клети для двухпозиционной обработки заготовок | 1977 |
|
SU766693A1 |
| ПАТЕНТКО-ТЕХЯИЧ[;"КА11БИБЛИОТЕКА | 1971 |
|
SU302179A1 |
| Устройство для ориентирования изделий на конвейере | 1985 |
|
SU1281488A1 |
| Устройство для литья под давлением роторов электродвигателей | 1973 |
|
SU553716A1 |