Известные шпатовые манипуляторы, содержащие задающий механизм с рукояткой управления и исполнительный механизм, не позволяют выполнять различные операции в больщом телесном угле из-за громоздкости и сложности унлотнительных устройств.
Целью изобретения является повыщение свободы перемещения в заданном телесном угле и обеспечение герметичности при передаче движения.
Предложенный щпаговьтй манипулятор отличается от известных тем, что задающий и исполнительный механизмы снабжены опорами в виде закрепленных на взаимно перпендикулярных осях колец с прорезями для ограниченного перемещения и кинемати 1ески связаны между собой посредством магнитных муфт и гибких вали,ков.
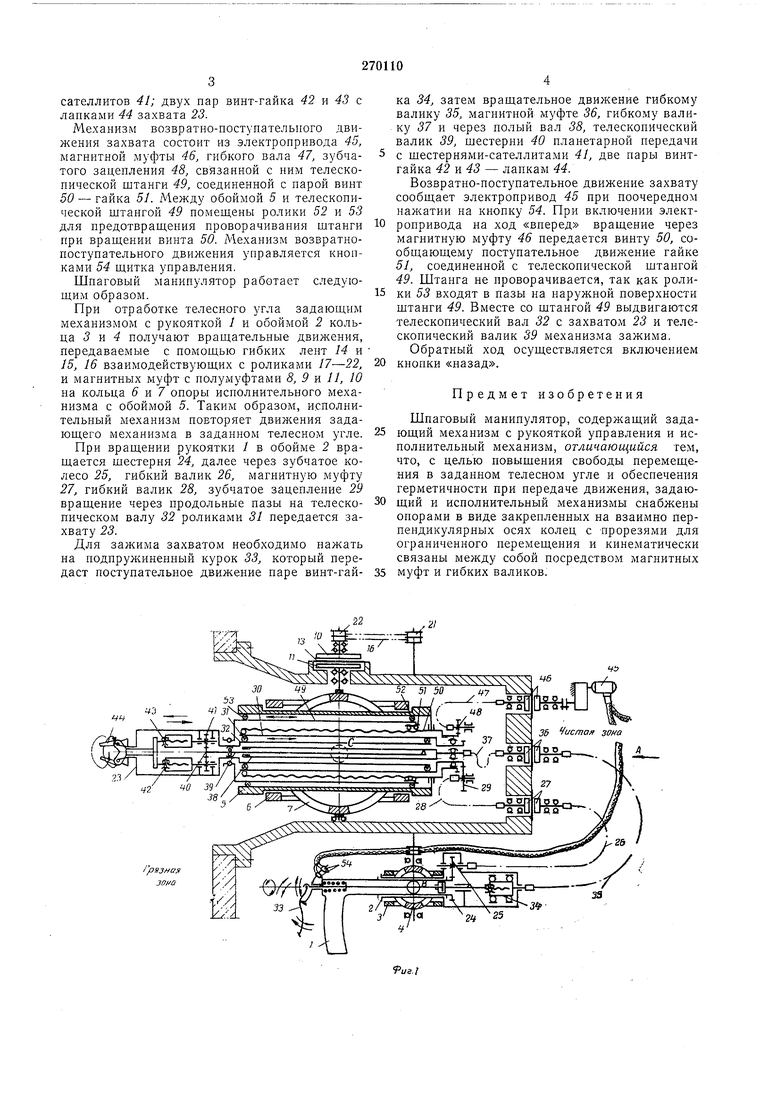
На фиг. 1 изображена кинематическая схема предлагаемого манипулятора; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - аксонометрическая проекция опоры задающего механизма.
Шпаговый манипулятор содержит задающий механизм с рукояткой / управления и обоймой 2, закрепленными в опоре, состоящей из колец 3 и 4, имеющих взаимно перпендикулярные оси вращения, и исполнительный механизм в виде щпаги с обоймой 5, закрепленной Б опоре, состоящей из колец ff и 7.
Задающий и исполнительный механизмы кине матически связаны между собой посредством МаГНРТТНЫХ МУФТ, состоящих из ПОЛУМУфт
8, 9 и 10. //, расположенных по разные стороны экранов 12, 13, и гибких лент 14. 15 и 16. взаимодействуюн1их с роликами 17-22 для передачи вращательного движения с колец опоры задающего механизма на кольца опоры исполнительного механизма.
Кроме того, манипулятор содержит механизмы возвратно-поступательного движения захвата 23. вращения захвата и захватом.
Механизм вращения захвата относительно своей оси состоит из щестерни 24, закрепленной на рукоятке /, зубчатого колеса 25, соединенного гибким валиком 26 через магнитную МУФТУ 27 и гибкий валик 28 с зубчатым заценлением 29, приводящим в движение полый вал 30. На конце полого вала но периметру установлены ролики 31, входящие в пазы телескопического полого вала 32, в который вставлен захват 23.
Механизм зажима захватом состоит из поднрул иненного курка 33. связанного нри помощи пары винт-гайка 34, гибкого валика 35, магнитной муфты 36, гибкого валика 37, полого вала 38, телескопического валика 39, птестерни 40 планетарной передачи, вдестернейсателлитов 41; двух пар винт-гайка 42 43 с лапками 44 захвата 23.
Механизм возвратно-поступательного движения захвата состоит из электропривода 45, магнитной муфты 46, гибкого вала 47, зубчатого зацепления 48, связанной с ним телескопической штанги 49, соединенной с парой винт 50 - гайка 51. Между обоймой 5 и телескопической штангой 49 помеш.ены ролики 52 и 53 для предотвраш,ения проворачивания штанги при вращении винта 50. Механизм возвратнопоступательного движения управляется кнопками 54 ш,итка управления.
Шпаговый манипулятор работает следуюШ.ИМ образом.
При отработке телесного угла задаюш,им механизмом с рукояткой / и обоймой 2 кольца 5 и 4 получают враш,ательные движения, передаваемые с помощью гибких лент 14 и 15, 16 взаимодействующих с роликами /7-22, и магнитных муфт с полумуфтами 8, 9 н 11, 10 на кольца 6 к 7 опоры исполнительного механизма с обоймой 5. Таким образом, исполнительный механизм повторяет движения задающего механизма в заданном телесном угле.
При вращении рукоятки / в обойме 2 вращается шестерня 24, далее через зубчатое колесо 25, гибкий валик 26, магнитную муфту 27, гибкий валик 28, зубчатое зацепление 29 вращение через продольные пазы на телескопическом валу 32 роликами 31 передается захвату 23.
Для зажима захватом необходимо нажать на подпружиненный курок 33, который передаст поступательное движение паре винт-гай/рязнаязона
ка 34, затем вращательное движение гибкому
валику 35, магнитной муфте 36, гибкому валнку 57 и через полый вал 38, телескопический
валик 39, шестерни 40 планетарной передачи
с щестернями-сателлитами 41, две пары винтгайка 42 ii43 - лапкам 44.
Возвратно-поступательное движение захвату сообщает электропривод 45 при поочередном нажатии на кнопку 54. При включении электропривода на ход «вперед вращение через магнитную муфту 46 передается винту 50, сообщающему поступательное движение гайке 51, соединенной с телескопической штангой 49. Штанга не проворачивается, так как ролики 53 входят в пазы на паружной поверхности штанги 49. Вместе со штангой 49 выдвигаются телескопический вал 32 с захватом 23 и телескопический валик 39 механизма зажима. Обратный ход осуществляется включением
кнопки «назад.
Предмет изобретения
Шпаговый манипулятор, содержащий задающий механизм с рукояткой управления и исполнительный механизм, отличающийся тем, что, с целью повышения свободы перемещения в заданном телесном угле и обеспечения герметичности при передаче движения, задающий и исполнительный механизмы снабжены опорами в виде закрепленных на взаимно перпендикулярных осях колец с прорезями для ограниченного перемещения и кинематически связаны между собой посредством магнитных муфт и гибких валиков.
p|a
fus г
-rr
го
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для расцепления железнодорожных вагонов | 1988 |
|
SU1564032A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОЙ СКОРОСТНОЙ НАМОТКИ НА КАТУШКИ НИТЕОБРАЗНЫХ МАТЕРИАЛОВ | 1972 |
|
SU360128A1 |
| УСТАНОВКА ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ | 2000 |
|
RU2190035C2 |
| Устройство для суперфиниширования шеек коленчатого вала | 1973 |
|
SU649557A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| АППАРАТ ДЛЯ ПРИГОТОВЛЕНИЯ СТЕРИЛЬНЫХ МАЗЕЙ | 2000 |
|
RU2183952C2 |
| НАПЛАВОЧНЫЙ СТАНОК | 2003 |
|
RU2246384C2 |
| Устройство для сборки крепежных элементов | 1987 |
|
SU1511103A1 |
| Автомат для отгибки зацепов пружин растяжения | 1989 |
|
SU1641491A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |

