(54) МЕХАНИЗМ ШАГАНИЯ СТРОИТЕЛЬНЫХ МАШИН, НАПРИМЕР
Изобретение предназначено для передвижения тяжелых строительных машин по фронту работ, включающего боковые перемещения разного направления, движение вперед и назаД; производимые без разворота мапшны.
Известны механизмы щагания строительных мащин, например транщеекопателя, включающие несущую платформу, опоры с плитами и лыжами. Однако при помощи таких механизмов невозможно осуществить боковое перемещение машины либо использовать движение для подачи рабочего органа.
Предложенный механизм позволяет повысить маневренность мапжны. Это достигается тем, что каждая опора механизма вьшолнена с соединенными между собой посредством шатунов эксцентриковыми валами, к которым прикреплены .пыжи.
Каждая из опор соединена с несущей платформой посредством сферического шарнира.
На фиг. 1 представлена опора описьтаемого механизма; на фиг. 2 - кинематическая схема механизма; на фиг. 3 - схема расположения опор механизма, две проекции. ТРАНШЕЕКОПАТЕЛЯ
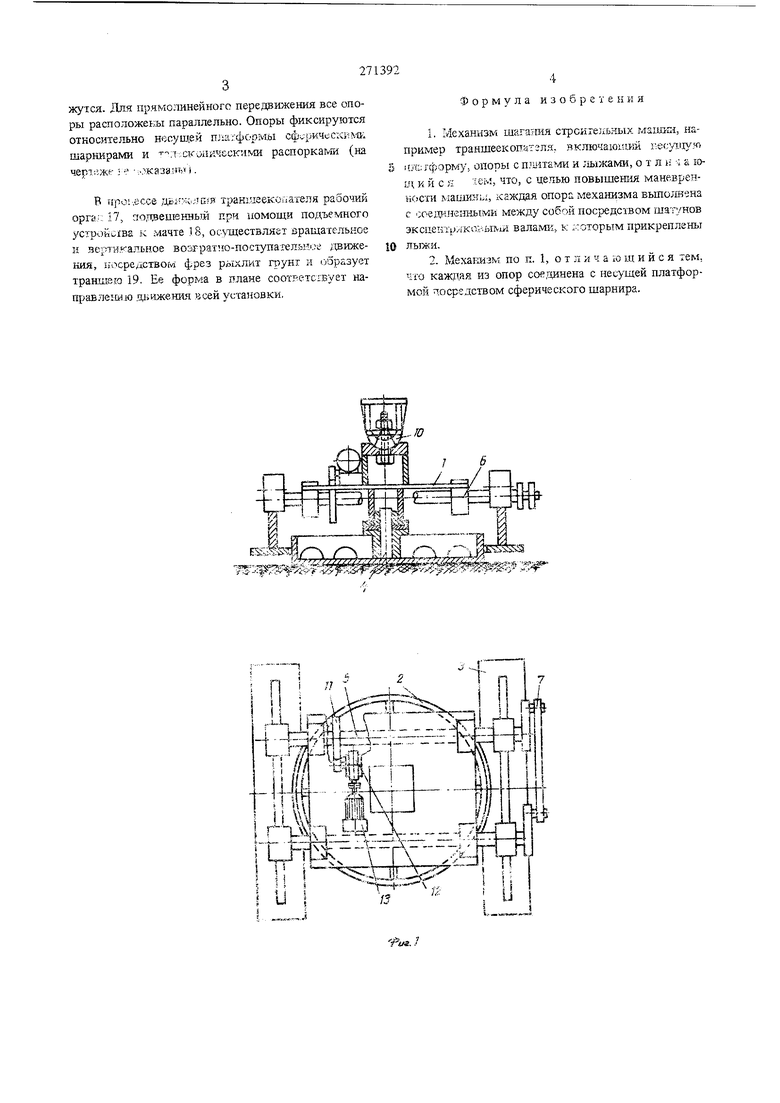
форму 1, опоры с центральными опорными круглыми плитами 2 и двумя боковыми лыжами 3. Плита 2 каждой опоры при помощи шкворневого устройства 4 соединена с несущей платформой, на которой установлены два эксцентриковых вала 5 с опорными подшипниками 6. Для синхронизации работы оба эксцентриковых вала соединены между собой посредством шатуна 7. Боковые лыжи при помощи подшипников 8 насажены на эксцентрики 9, которые шпонками укреплены на валах 5.
Каждая из опор соединена с несущей платформой посредством сферического шарнира 10. Один из эксцентриковых валов приводится во вращение при помощи открытой зубчатой передачи 11, червячного редуктора 12 и электродвигателя 13.
Для передвижения опытного образца гидромеханизированного траншеекопателя было установлено три автономных опоры таким образом, что поворот несущей платформы возможен относительно опоры 14 по радиусу, не превышающему базовый размер А (фиг. 3). Для опытного образца траншеекопателя базовьш размер составляет 5300 мм. Опоры 15 и 16 устанавливаются нормально к радиусу окружности, по которой они движутся. Для прямолинейного передвижения все опоры расположсБы параллельно. Опоры фиксируются откосительно несущей пг:а;:формй1 сф.; ЖЧсСХ11Ка; шарнирами и ,ско1 йЧ скими распоркагущ (на чер1;;же : чоказагвд).
В 1фс;,ессе , тран1игек ;йа1еля рабочий оргй,:.: 17, подвешенный при иомощи подъемного ycrpcihciBa к мачте 18, ос тдествляет вращательное н вертикальное возграП о-пос1упагельн1:;е даижения, irocpe/icTBOfvi фрез рыхлит гоунт и образует траншею 19. Ее форма в плане соотретствует направлению .щ ижения liceu установки.
Формула изобретения
1.Механизм шагания строительных махшш, например траншеекопйтгля, включаюит.ш i-ecviJiyjo |г:га;1форму. опоры с п.тштагли и ;1ыжамн, о т л и ч а и и с к iSM, что, с цепью повышения маневренкости маилкны, каждая опора механизма вьшо/шена с соединенными между собой посредством шатунов 3Kcne iTiJ/iKor.b№ii-i валамк, к :-:оторым прикреплены лыжи.
2.Мехат-шзм по п. 1, отличающийся тем. ifo кажддя из опор соеданена с несущей платформой .осредством сферического шарнира.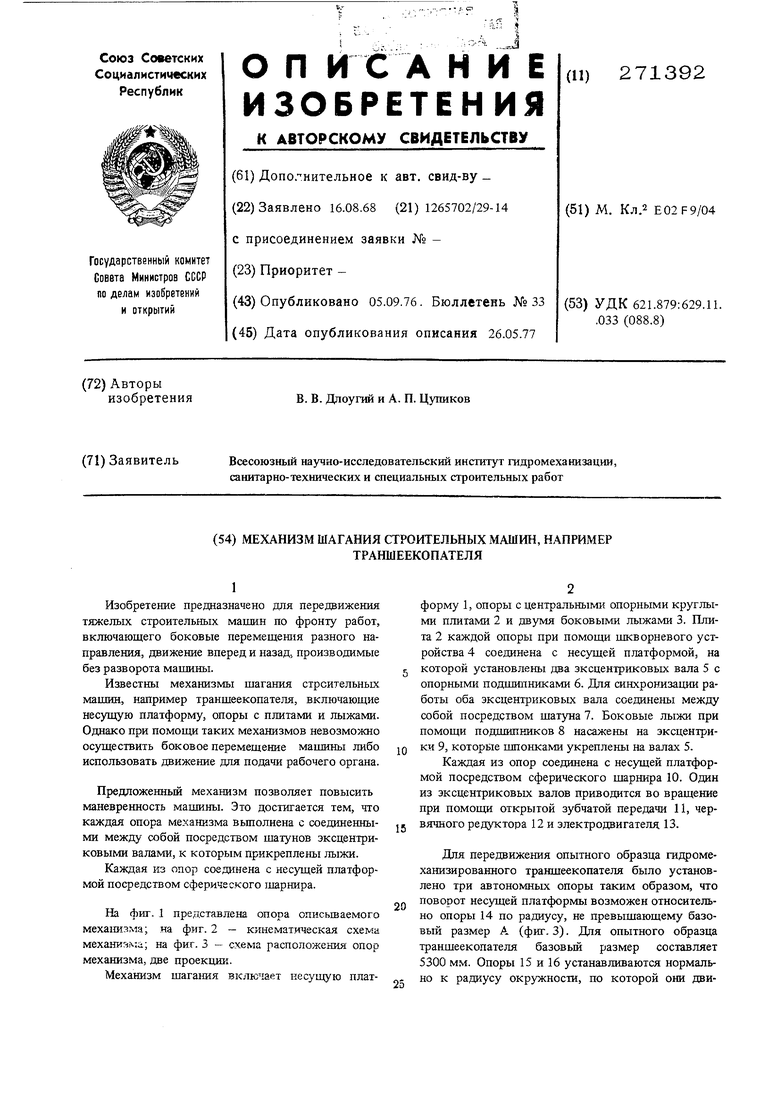
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРНОЕ УСТРОЙСТВО ШАГАЮЩЕГО ХОДОВОГО МЕХАНИЗМА | 1969 |
|
SU251484A1 |
| Механизм шагания экскаватора | 1982 |
|
SU1167277A1 |
| Механизм передвижения шагающего экскаватора с гидравлическим приводом | 1949 |
|
SU86079A1 |
| Механизм шагания экскаватора-драглайна | 1990 |
|
SU1735509A1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| Механизм шагания экскаватора | 1981 |
|
SU1004549A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Шагающий ходовой механизм для шнекобуровых машин | 1976 |
|
SU614216A1 |
| Шагающее транспортное средство | 1982 |
|
SU1126488A1 |
| Механизм шагания экскаватора | 1979 |
|
SU825806A1 |

- r p;: -:;W«3 -:- -.,.,,, .-S/
Jr-Lj- - -lJ l I ,..-
;
Tf
|tv«i
/v-Wl r
V / / / i,.,M
