Известно автоматическое устройство для управления иогрузочно-разгрузочиым механизмом, содержащее датчики положения механизма и отдельны.х его узлов, датчики отсчета пути. Пройденного механизмом, счетчики гшпульсов, логический блок, программный блок и блок йускй.
Недостатки устройства: сложность схемы записи и считывания адреса, невозможность автоматического сопоставления наличия грузов-ня штабелере и в заирограммированиой ячейке, что может привести к аварии при загрузке занятой ячейки, вращение вил механизМа вручную при работе на противоположные Стеллажи, продольное перемещение только на одной скорости, сложность задания прогр&мМЬ1.
Для :йовьгшеНия наделшости в предлагаемое устройство дополнительно введен блок анализа правильности набранной программы, содер кащей схему сравнения. Ко входам схемы сравнения подключены датчики наличия груза .на механиз.ге, датчики положения механизма и отдельных его узлов и через переключатель -датчики наличия груза в ячейках. Выход схемь подключен к Логическому блоку .
Для точной установки механизма в устройство введен блок снижения скорости продольного перемеп1,енпя. Его вход подключен к гчетчику, связанному с дагчиком счета пройлсииого пути, а выход - к логическому олоку.
На сриг. 1 изображена функпноиальиая схема устройства; на фиг. 2 - схема расположения стеллажей.
Устройство содержит программный блок /, блок пуска 2, схему сравнения 3, логическую схему 4, счетчик 5, переключатель 6, Датчики 7 наличия груза в ячейках, Датчик 8 груза на вилах механизма, датчики .9 положения механизма, датчики JO счега, схемй отбора II и блок 12 ступенчатого снижения скорости.
Нрограммный блок И111фрует в двоичный код адрес стеЛлажа, этажа, ряда с иомои1,ью перфокарты. Пусковое устройство - кнопка. Схема сравнення 3 разрешает запуск логической схемы только при соответствии грузов на вплах механизма и в запрограммированной ячейке, причел механизм и его узлы должны находиться в исходном иоложении. На вход схемы сравнения поданы связи от пускового устройства, датчика груза на вилах, датчиков груза в ячейках через переключатель 6. НерекЛючатеЛь 6 иодключает на вход схемы сравнения соответствующи программе датчпк груза в ячейке. На входы счетчика 5 иоданы выходы программного блока / п схемы отбора 11 датчиков счета, выход счетчпка 5 соединеп с блоком 12 ступенчатого снижения скорости, выход которого подан на вход логпческой схемы 4. Схема 4 ун.равляет носледовательностьк
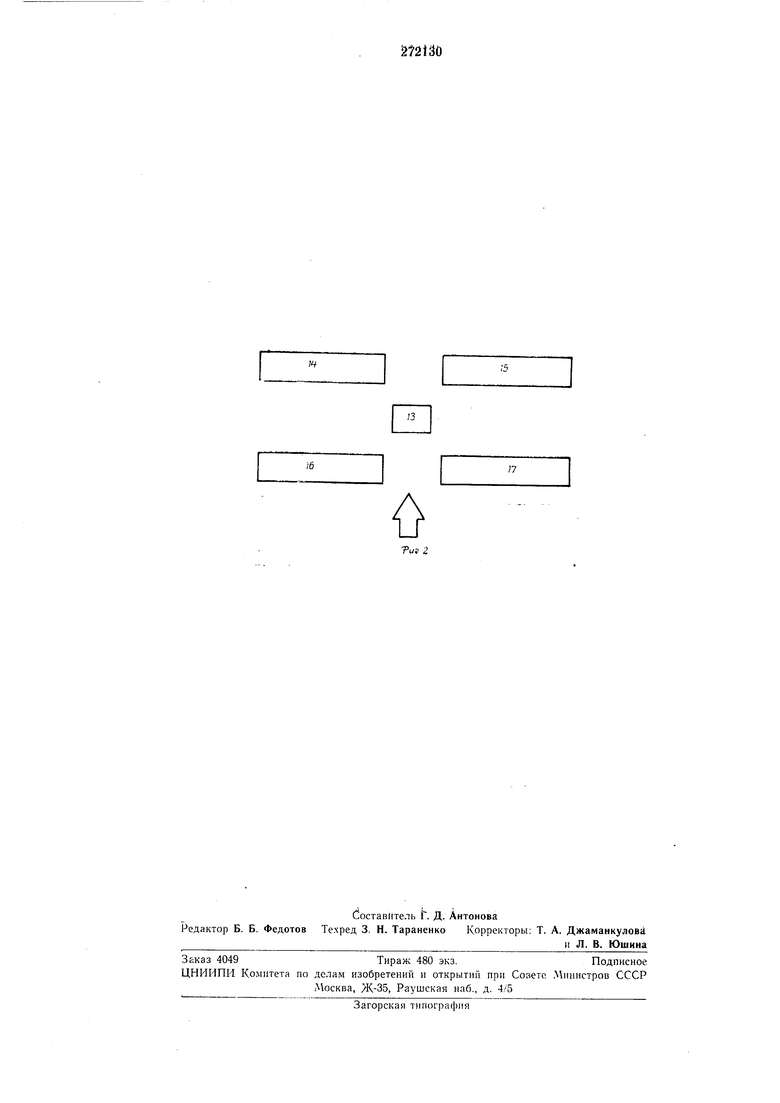
включения исполнительных двигателей. На вход схемы подключены выходы ирограммного блока, схемы сравнения, блока ступенчатого снижения скорости и датчиков положения механизма и отдельных его узлов. Выход логической схемы подключен к исиолнительным органам. Схема отбора 11 в соответствии с положением вил механизма с помощью датчиков положения узла вращения подключает к счетному входу считчика 5 один из датчиков счета 10, генерирующих импульсы у каждого вертикального ряда различных стеллажей. Стеллажи расположены в соответствии со схемой, представленной иа фиг. 2. Штабелер 13 движется в проходе между стеллажами 14, 15 и 16, 17. Отсчет вертикальных рядов для каждого стеллажа производится от исходного положения, т. е. от положения штабелера, показанного на фиг. 2. Нумерация стеллажей для рассматриваемого случая выполнена так: Х I 16; №. 2 - 17; № 3 - 14; N° 4 - 15.
Схема работает следующим образом.
По команде блока пуска 2 схема сравнения 3 сравнивает состояние выходов датчика 8 груза и иереключателя 6, подключаюп;его на вход схемы сравнения ,3 датчик груза запрограммированной ячейки. При соответствии этих выходов (т. е. грузов в ячейке и на вилах) и наличии сигналов от датчиков 9 схема сравнения дает сигнал запуска логической схемы 4. К этому времени на счетчик 5 записывается адрес с программного блока 1. Логическая схема 4 управляет последовательностью
включения исполнительных двигателей на основании данных программы, датчиков 9 положения механизма и выхода счетчика 5, соедннеииого с логической схемой через блок 12 ступенчатого снижения скорости.
Предмет изобретения
1.Устройство для автоматического управления погрузочно-разгрузочным механизмом, содержащее датчики положения мехаиизма н отдельных его узлов, датчики отсчета пути, «пройденного механизмом, счетчики нл1 пульсов, логический блок для унравлення иоследовагельиости включения исполнительных двигателей, программный блок и блок пуска, отличающееся тем, что, с целью повышения надежности работы устройства, в него дополнительно введен блок анализа правильности набранной программы, содержащий схему сравнения, ко входам которой подключены датчики наличия груза на механизме, датчики иоложения механизма и отдельных его узлов и через иереключатель-датчики наличия груза в ячейках, а выход схемы сравнения подключен к логическому блоку.
2.Устройство по н. 1, отличающееся тем. что, с целью точной установки механизма, в устройство введен блок снижения скорости продольного перемещения, вход которого подключен к счетчику, связанному с датчиком счета пройденного пути, а выход блока снижения скорости подключен к логическому блоку.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПОГРУЗОЧНО- РАЗГРУЗОЧНЫМ МЕХАНИЗМОМ | 1972 |
|
SU329530A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| ВСССОЮЗН.АЯпАтгнт'ш-j.x:;;v г кдп | 1971 |
|
SU296108A1 |
| Устройство для автоматического управ-лЕНия пЕРЕМЕщЕНиЕМ ТРАНСпОРТНОгО MEXA-НизМА ВдОль СТЕлАжЕй | 1977 |
|
SU844517A1 |
| Информационное устройство для стеллажных складов | 1982 |
|
SU1123957A1 |
| Устройство для управления краном-штабелером | 1988 |
|
SU1558822A1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство для автоматического управления краном-штабелером | 1971 |
|
SU473187A1 |
| ГЕНЕРАТОР КОДА МОРЗЕВ П Т БAf(f3« fv^-^jr-i'i •;••-•.•«(.«Фип,1>& ;Г-''--'-':^'-'HI | 1971 |
|
SU430364A1 |
| Система совместного управления штабелерами | 1990 |
|
SU1754595A1 |