1
Устройство может быть использовано на складах готовой продукции, заготовок, полуфабрикатов в инструментальных кладовых и т. п.
Известны устройства для автоматического управления погрузочно-разгрузочными работами на бесконтактных логических элементах, содержащие блок задания координат, первый выход которого соединен через дешифратор переходов, блок связи и дешифратор выхода с выходным блоком, а второй выход через блок триггеров - с дешифратором выхода.
Однако в таких устройствах возможно ошибочное адресование штабелера из-за «сбоев при вводе и отработке программы.
С целью повышения надежности выполнения заданной программы работы крана-штабелера в устройство управления введен блок дешифратора контроля выполнения программы, вход которого подключен к блоку задания координат, а выход - к дешифратору выхода.
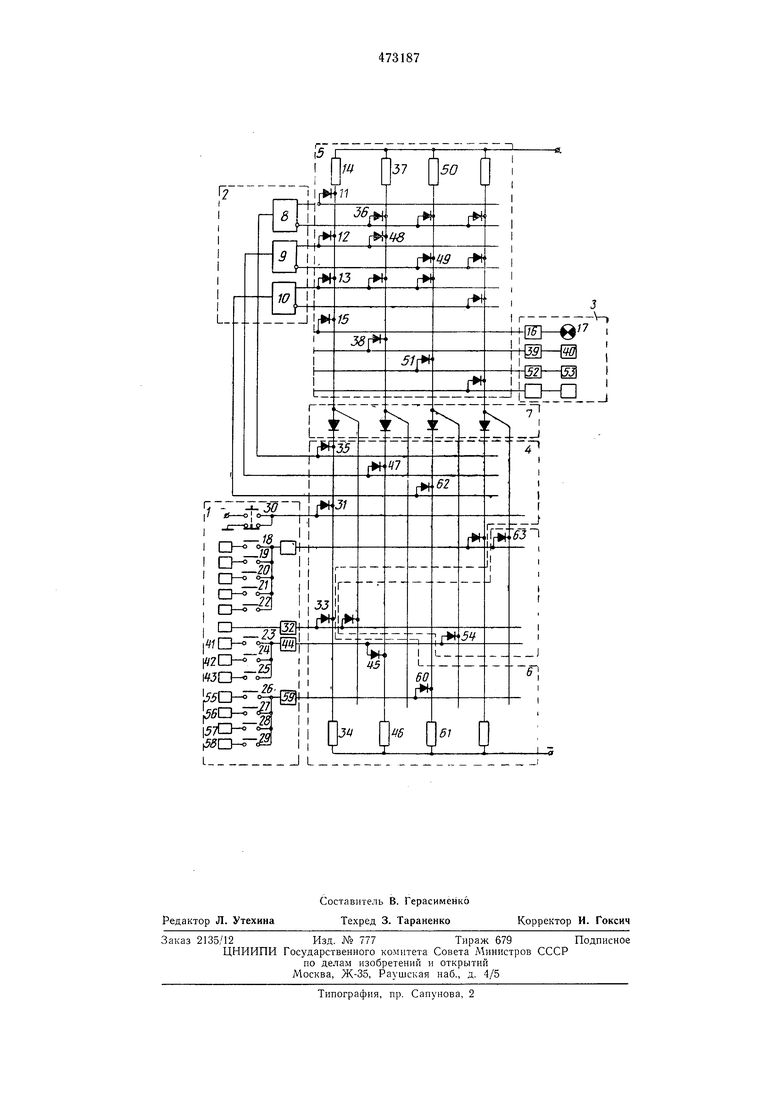
На чертеже изображена блок-схема устройства.
Устройство состоит из блока задания координат 1, блока триггеров 2, выходного блока 3, дешифратора переходов 4, дешифратора выхода 5, дешифратора контроля выполнения программы 6 и блока связи 7.
Выходы блока 1 соединены с дешифратором 4 и входами дешифратора 6, выходы которого через блок связи 7 соединены с входами дешифратора 5, выходы которого соединены с выходным блоком 3 и входами блока триггеров 2.
Устройство работает следуюшим образом.
В исходном состоянии штабелера прямые выходы триггеров 8-10 имеют высокий потенциал и диоды 11 -13 закрыты. Напряжение через резистор 14 и диод 15 проходит на вход усилителя 16, и загорается сигнальная лампа 17 «исходное состояние.
Оператор с помош,ью клавишных переключателей 18-29 задает необходимую программу движения штабелера. Ноиск ячейки происходит в трех координатах. Клавиши 18- 22 определяют выбор вертикального ряда ячеек и управляют движением моста крана-штабелера, клавиши 23-25 определяют выбор стеллажа и управляют движением тележки крана-штабслера и клавиши 26-29 определяют выбор ячеек в вертикальном ряду и управляют движением вил крана-штабелера.
При нажатии кнопки 30 «пуск цикла диод 31 закрывается высоким потенциалом. Если штабелер находится в исходном положении, то на выходе инвертора 32 будет высокий потенциал и диод 33 заперт. Кроме того, при нажатии кнопки 30 отрицательное напряжение от источника питания через резистор 34 и диод 35 поступает на вход триггера 8 и перебрасывает его, при этом высокий потенциал исчезает на прямом выходе триггера 8 и появляется на инверсном выходе, закрывая диод 36. Затем через резистор 37 напряжение поступает на вторую вертикальную шипу и через диод 38 на вход усилителя 39, после чего включается пускатель 40 движения тележки вдоль моста (выбор стеллажа). Одновременно напряжение на первой вертикальной шине исчезает, так как диод 11 подключен анодом на землю. На входе усилителя 16 напряжение исчезает, и лампа 17 «исходное состояние гаснет. Тележка движется до срабатывания заданного датчика 41-43. При срабатывании одного из датчиков 41-43 через клавишный переключатель подается нулевой потенциал на вход инвертора 44, который высоким потенциалом закрывает диод 45. Далее напряжение через резистор 46 и диод 47 поступает на вход триггера 9 и перебрасывает его. При этом высокий потенциал исчезает на аноде диода 48 и появляется на аноде диода 49, и движение тележки прекраш,ается. Затем начинается движение моста (выбор вертикального ряда ячеек), так как напряжение через резистор 50 и диод 51 поступает на вход усилителя 52 и включается пускатель 53 движения моста. Во время движения моста при помош,и диода 54 контролируется положение тележки с вилами. Как только тележка съезжает с датчика 41-43, анод диода 54 закорачивается на землю, после чего на входе усилителя 52 пропадает сигнал и мост останавливается. По достижении мостом датчика 55-58, определяюш,его заданный вертикальный ряд ячеек на выходе инвертора 59 появляется напряжение и диод 60 запирается. При этом через резистор 61 и диод 62 перебрасывается триггер 10. Напряжение исчезает на третьей шине и появляется на четвертой. Прекраш,ается движение моста, и начинается движение вил к заданной ячейке. Во время движения вил вверх производится контроль за нахождением штабелера в заданном ряду через диод 63. Движение вил в стеллаж, лодъем и опускание вил в ячейке, возврат вил, возврат моста и тележки в исходное положение происходят аналогично. т-г Предмет изобретения Устройство для автоматического управления краном-штабелером, содержаш,ее блок задания координат, первый выход которого соединен через дешифратор переходов, блок связи и дешифратор выхода с выходным блоком, а второй выход через блок триггеров - с дешифратором выхода, отличающееся тем, что, с целью повышения надежности выполнения заданной программы работы кранаштабелера, в него дополнительно введен блок дешифратора контроля выполнения программы, вход которого подключен к блоку задания координат, а выход - к дешифратору выхода.
J II
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство для автоматического управления мостовым стеллажным краном-штабелером | 1984 |
|
SU1235795A1 |
| Информационное устройство для стеллажных складов | 1982 |
|
SU1123957A1 |
| Устройство для контроля положения каретки стеллажного крана-штабелера | 1986 |
|
SU1466991A1 |
| МОСТОВОЙ КРАН-ШТАБЕЛЕР | 1997 |
|
RU2191150C2 |
| Устройство для адресования крана-штабелера складского стеллажа | 1984 |
|
SU1411223A1 |
| Устройство для автоматического адресования транспортного средства | 1986 |
|
SU1388904A1 |
| Устройство для управления приводом кранштабелера | 1984 |
|
SU1193690A1 |
| Устройство для управления вентильным преобразователем | 1984 |
|
SU1205243A2 |
| Устройство для автоматическогоРАСпРЕдЕлЕНия ТРуб пО пОТОчНыМ лиНияМиХ ОТдЕлКи | 1979 |
|
SU806186A1 |