зовой платформе транспортного механизма и подключенных к узлам упра:вления нми;
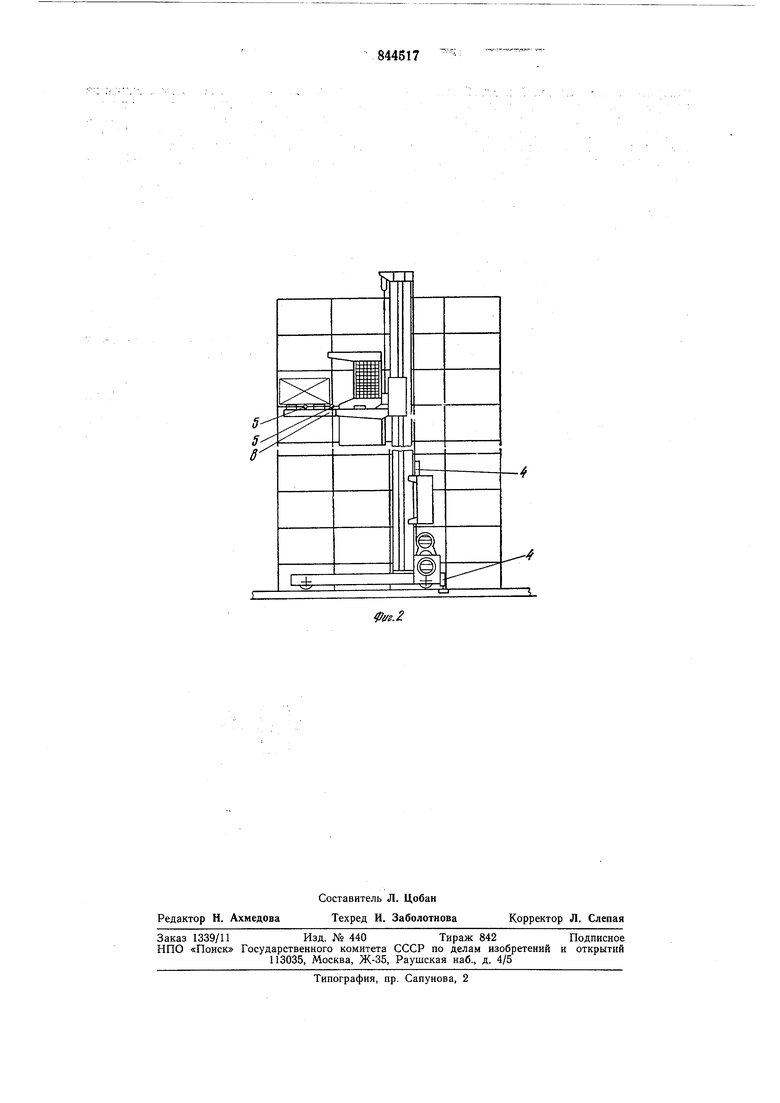
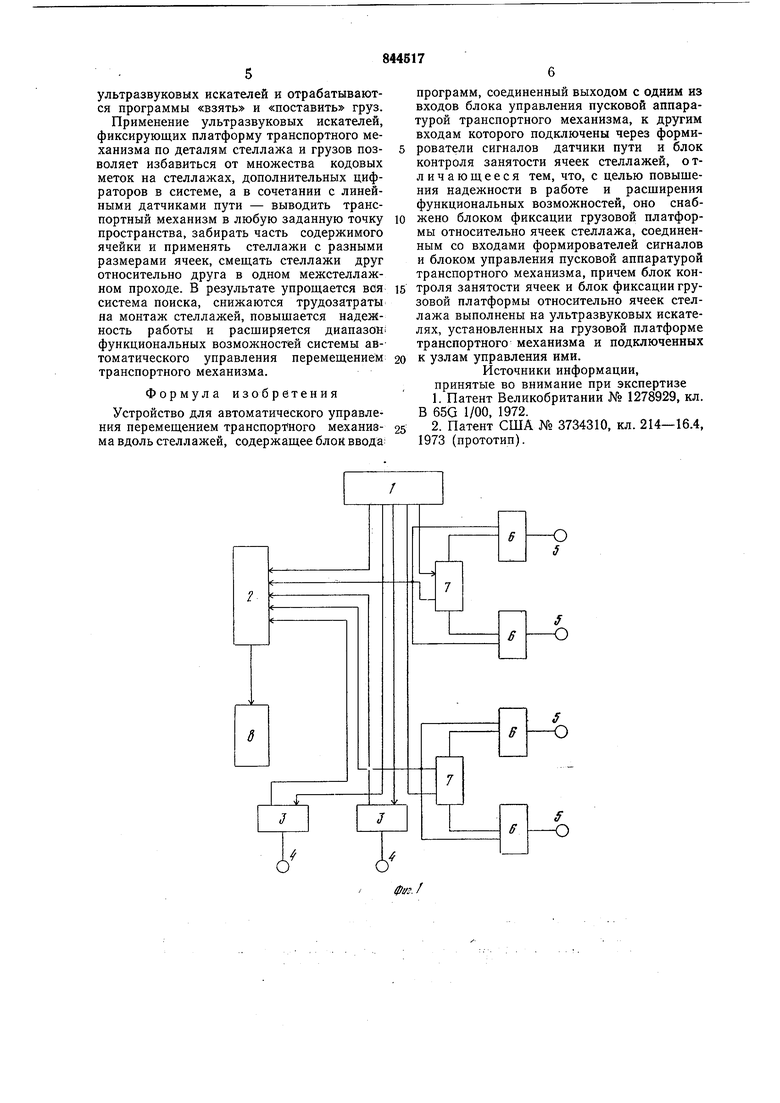
Изобретение иллюстрируется чертежами, где на фиг. 1 представлена блок-схема устройства для автоматического управления перемещением транспортного механизма; на фиг. 2 - общий вид механизма.
Устройство содержит блок 1 ввода программ (осуществляющий прием и хранение команд, контроль их выполнения, передачу информации ЭВМ или оператору о положении механизма, преобразование команд в управляющие сигналы и их распределение по блокам), соединенный выходом с одним из входов блока 2 управления пусковой аппаратурой транспортного механизма, к другим входам которого через формирователи, например счетчики 3 импульсов, подключены линейные датчики 4, измеряющие пройденный путь грузовой платформой механизма. Приводы штабелера работают до тех пор, пока заданная команда не совпадает с кодом нужной зоны склада.
Блоки контроля занятости ячеек стеллажа и фиксации грузовой платформы относительно ячеек стеллажа выполнены на ультразвуковых искателях (локаторах), включающих в себя ультразвуковые головки 5, соединенные с блоками 6 управления и предназначенных для обнаружения деталей конструкции стеллажей, грузов и распознавание их по эхо-сигналу, коммутации сформированных сигналов по соответствующим цепям, подачи сигнала по амплитуде для точной остановки грузовой платформы механизма и контроля занятости ячеек. ВыходЪ блоков 6 подключены ко входам формирователей, в частности счетчиков 7, и ко входам блока 2 управления пусковой аппаратурой. Счетчики 7 импульсов (формирователи сигналов) осуществляют счет импульсов, подачу команд на переключение скорости электродвигателей и останов механизма и их выходы подключены ко входам блока 2 управления. Блок 2 управления пусковой аппаратурой транспортного механизма подает команды пусковой аппаратуре механизма на включение, переключение, останов, торможение электродвигателей и осуществляет программу команд «взять или «поставить, выход этого блока соединен также со входами пульта 8 управления транспортного механизма.
Линейные датчики пути 4, ультразвуковые головки 5 и пульт с установленными в нем блоками 1, 2 и 6 и счетчиками 3 и 7 импульсов размещены на транспортном механизме.
Устройство работает следующим образом.
Команда на поиск груза или места хранения в виде кода от ЭВМ или пульта управления оператора поступает по лийии связи В блок I ввода программы, где запоминается и преобразуется в соответствующие сигналы управления. Сигналы управления поступают в блок 2 управления пусковой аппаратурой транспортного механизма для включения электродвигателей механизма и в виде заданного количества отсчета импульсов в счетчики 7, которые запоминают их и при отсчете необходимого числа импульсов выдают управляющие сигналы блоку 2 управления пусковой аппаратурой на переключение скорости электродвигателей.
При движении механизма счетчики 7 по сигналам ультразвуковых искателей производят отсчет стоек и полок стеллажей. Причем каждый ультразвуковой искатель по характерным признакам (по расстоянию до
головки, габаритным размерам, направлению) отличает стойку от полки и выдает на соответствующий счетчик 7 (по координате X или F) сигнал для счета (в режиме поиска производится дублирование работы искателей). В заданный программой момент происходит переключение скорости механизма.
На малой скорости грузовая платформа механизма подходит к заданной ячейке. Выведенная в заданную точку, с определенной точностью, грузовая платформа по сигналам ультразвуковых искателей, поступающих непосредственно в блок 2 управления пусковой аппаратурой, фиксируется относительно ячейки стеллажа или груза.
Головки 5 ультразвуковых искателей размещены на грузовой платформе таким образом, что в режиме «поставить груз одна головка контролирует положение платформы относительно полки и стойки, а вторая наличие грузов в ячейке. В режиме «взять груз одна из головок контролирует положение платформы относительно стойки и полки, а вторая - нижнюю кромку груза,
что позволяет определить наличие груза в ячейке и при наличии его зафиксировать платформу таким образом, что обеспечивается необходимый зазор между днищем груза и захватом.
По управляющим сигналам блока 2 управления пусковой аппаратурой транспортным механизмом отрабатывается программа «взять или «поставить груз. Линейные датчики 4 путИ во время двйжения транспортного механизма измеряют ПО двум координатам пройденный грузовой платформой путь и подают дискретные сигналы на соответствующие счетчики 3, передающие управляющие сигналы на блок 2
управления пусковой аппаратурой.
В блоке управления пусковой аппаратурой происходит сравнение сигналов от линейных датчиков 4 пути и от ультразвуковых искателей, после чего управляющие
сигналы подаются на пусковую аппаратуру транйпортного механизма для переключений скорости и выключения электродвигателей. В этом случае фиксация платформы относительно ячейки стеллажа или груза
происходит, как указано выше, с помощью
ультразвуковых искателей и отрабатываются программы «взять и «поставить груз. Применение ультразвуковых искателей, фиксирующих платформу транспортного механизма по деталям стеллажа и грузов позволяет избавиться от множества кодовых меток на стеллажах, дополнительных цифраторов в системе, а в сочетании с линейными датчиками пути - выводить транспортный механизм в любую заданную точку пространства, забирать часть содержимого ячейки и применять стеллажи с разными размерами ячеек, смещать стеллажи друг относительно друга в одном межстеллажном проходе. В результате упрощается вся система поиска, снижаются трудозатраты на монтаж стеллажей, повыщается надежность работы и расширяется диапазонфункциональных возможностей системы автоматического управления перемещением транспортного механизма.
Формула изобретения
Устройство для автоматического управления перемещением транспортного механизма вдоль стеллажей, содержащее блок ввода:
программ, соединенный выходом с одним из входов блока управления пусковой аппаратурой транспортного механизма, к другим входам которого подключены через формирователи сигналов датчики пути и блок контроля занятости ячеек стеллажей, отличающееся тем, что, с целью повышения надежности в работе и расширения функциональных возможностей, оно снабжено блоком фиксации грузовой платформы относительно ячеек стеллажа, соединенным со входами формирователей сигналов и блоком управления пусковой аппаратурой транспортного механизма, причем блок контроля занятости ячеек и блок фиксации грузовой платформы относительно ячеек стеллажа выполнены на ультразвуковых искателях, установленных на грузовой платформе транспортного механизма и подключенных к узлам управления ими.
Источники информации, принятые во внимание при экспертизе
1.Патент Великобритании № 1278929, кл. В 65G 1/00, 1972.
2.Патент США № 3734310, кл. 214-16.4, 1973 (прототип).
5- 6
Jh
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ВРЕМЕННОГО ХРАНЕНИЯ РАЗЛИЧНЫХ ПРЕДМЕТОВ | 1966 |
|
SU215637A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТОМ МНОГОЯРУСНОГО СКЛАДА ВЫСОКОПЛОТНОГО ХРАНЕНИЯ ЯЧЕЕК С ГРУЗОМ | 2006 |
|
RU2329191C2 |
| Информационное устройство для стеллажных складов | 1982 |
|
SU1123957A1 |
| Устройство для программного управ-лЕНия KPAHOM C дВуМя гРузОзАХВАТАМи | 1979 |
|
SU834672A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫМ МЕХАНИЗМОМ | 1970 |
|
SU272130A1 |
| Устройство для автоматического адресования грузов | 1972 |
|
SU477914A1 |
| Устройство для автоматического управления грузоносителем | 1976 |
|
SU747794A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Информационное устройство для стеллажных складов | 1981 |
|
SU990617A1 |