Изобретение относится к области антенной техники, а именно к конструкции устройства для поворота антенны.
В известных устройствах для поворота антенны, снабженных пространственным параллелограммным механизмом, которым приводпые двигатели соединены с рефлектором антенны и гироскопическими элементами, установка гироскопических элемептов на рефлекторе увеличивает вес рефлектора и его момент инерции, а наличие в составе кинематической цепи траверс и рычагов понижает жесткость цепи и надежность работы устройства.
В предлагаемом устройстве для упрощения конструкции и повышения надежности его работы параллелограммный механизм выполнен в виде параллельно расположенных тяг, шарнирно соединенных с рефлектором и рамками карданового или бикарданового подвеса, неподвижные оси которых установлены вдоль продольной оси корпуса устройства, а гироскопические элементы укреплены на рамке подвеса, соедипенной с приводными двигателями угла места и азимута.
На фиг. 1 изображена кинематическая схема устройства для поворота антенны с кардановым подвесом; на фиг. 2 - то же, с бикардановым подвесом.
ложенных тяг 2. Последние опираются поверхностями шарниров на внутренние рамки подвесов 5 с укрепленными в них гидроскопическими и другими электроэлементами 4.
Шарниры всех тяг крепятся к рамкам 3 так, что центры шарниров как на рефлекторе, так и на рамках находятся на одинаковых радиусах относительно осей (центров) поворота. Расстояние (радиус) от центра шарнира до центра его поворота выбирается максимальным в заданных габаритах.
Тяги относительно плоскостей рамок 3 располагаются так, чтобы в участвовали все тяги (например, по углам рамок).
Внутренние рамки 3 подвесов удерлсиваются на осях в подшипниках впешних рамок 5, которые устанавливаются на своих осях в подшипниках корпуса 6 антенны. Оси внешних и внутренних рамок взаимно перпендикулярны и образуют кардановый подвес.
Двумя степенями свободы могут обладать как внешняя, так и внутренняя рамки, смотря по тому, оси каких рамок закреплены в подшипниках корпуса и неподвижны относительно него. В данном случае (см. фиг. 1 и 2) двумя степенями свободы обладает внутренняя рамка. Оси внешних рамок 5, закрепляемые в подшипниках корпуса 6 антенны, должны быть параллельны друг другу.
Поворот в пространстве рамки с установленными на ней гироскопическими и другими электроэлементами и равный ей поворот рефлектора осуществляются приводным двигателем 7 угла места и приводным двигателем 8 азимута, действующими отдельно или вместе. Двигатели могут быть установлены относительно совокупных рамок (внутренней и впещней) в плоскости одного и того же карданового (см. фиг. 1) или бикарданового (см. фиг. 2) подвесов.
Двигатель S действует относительно оси вращения внещней рамки 5 и укрепляется на корпусе 6 антенны. Двигатель 7 угла места действует относительно оси вращення внутренней рамки 3.
В случае карданового подвеса приводной двигатель угла места укрепляется на внещней рамке 5 и поворачивается вместе с ней при действии приводного двигателя азимута.
В случае бикарданового подвеса приводной двигатель угла места укрепляется, как и приводпой двигатель азимута, неподвижпо на корпусе антенны и воздействует на ось бугеля 9, опирающегося на подшипники корпуса 6, и расположенную в плоскости подвеса перпендикулярно осям внещних рамок.
Оси бугеля Р и ось вращения внутренней рамки 3 лежат в одной плоскости и совпадают в положении, когда ось внутренней рамкп перпендикулярна продольной оси антенны.
Бугель связан с внутренней рамкой штоком, щарнирно соединенным с бугелем и жестко укрепленным на рамке. Шток входит в прорезь бугеля, позволяющую внутренней и внещней рамкам поворачиваться вокруг оси внещней рамки и лежащую в плоскости поворота внешней рамки.
Поворот бугеля 9 вокруг своей оси ведет к повороту внутренней рамки 3 вокруг осей ее закрепления во впещней рамке, а поворот внещней рамки 5 - к соответствующему повороту внутренней рамки, не воздействуя через ее шток на бугель вследствии наличия прорези.
Передача усилий (моментов) от двигателя 7 к внутренней рамке, гироскопическим и другим электроэлементам и дальще к рефлектору происходит последовательно через бугель, щток, рамку, тяги. Причем длина цепи от привода к элементам рамки оказывается наиболее короткой.
То же относится и к цепи от двигателя 8 к элементам внутренней рамки, которая включает в себя внещнюю рамку, внутреннюю рамку и тяги. Причем пень от двигателя к элементам внутренней рамки также наиболее короткая и содержит лищь одно люфтовое соединение между внещней п внутренней рамками (подшипник внутренней рамки). Применение бикарданового подвеса несмотря на наличие в нем дополнительной детали (бугеля) создает по сравнению с кардановым подвесом ряд дополнительных преимуществ, к числу которых относится возможность применения двух одинаковых по конструкции приводов, устанавливаемых на неподвижном основании антенны, что повыщает технологичность конструкции.
В этом случае достигается практически полная балансировка подвижных частей антенны
относительно их осей (центров) вращения, так как массы рамок и их элементов оказываются симметрично расположенными относительно осей вращения. В случае карданового подвеса существует асимметрия масс вследствие установки двигателя 7 с одной стороны внешней рамки 5 и нолучения за счет этого дополнительной величины дисбаланса относительно оси рамки.
Возможно исполнение приводов угла места
и азимута возвратно-ноступательного типа, действующих как на рамки, так и непосредственно на тяги, и установленных неподвижно на корпусе антенны.
Предмет изобретения
Устройство для поворота антенны, снабженное соединенным с приводными двигателями угла места и азимута, прострапственным параллелограмным механизмом, кинематически
связанным с рефлектором антенны и гироскопическими элементами, отличающееся тем, что, с целью упрощения конструкции устройства и новышения надежности его работы, параллелограмный механизм вынолнен в виде параллельно расположенных тяг, щарнирно соединенных с рефлектором и рамками карданового нли бикарданового подвеса, неподвижные оси которых установлены вдоль продольной оси корпуса устройства, а гироскопические элемепты укреплены на рамке подвеса, соединенной с приводными двигателями угла места и азимута.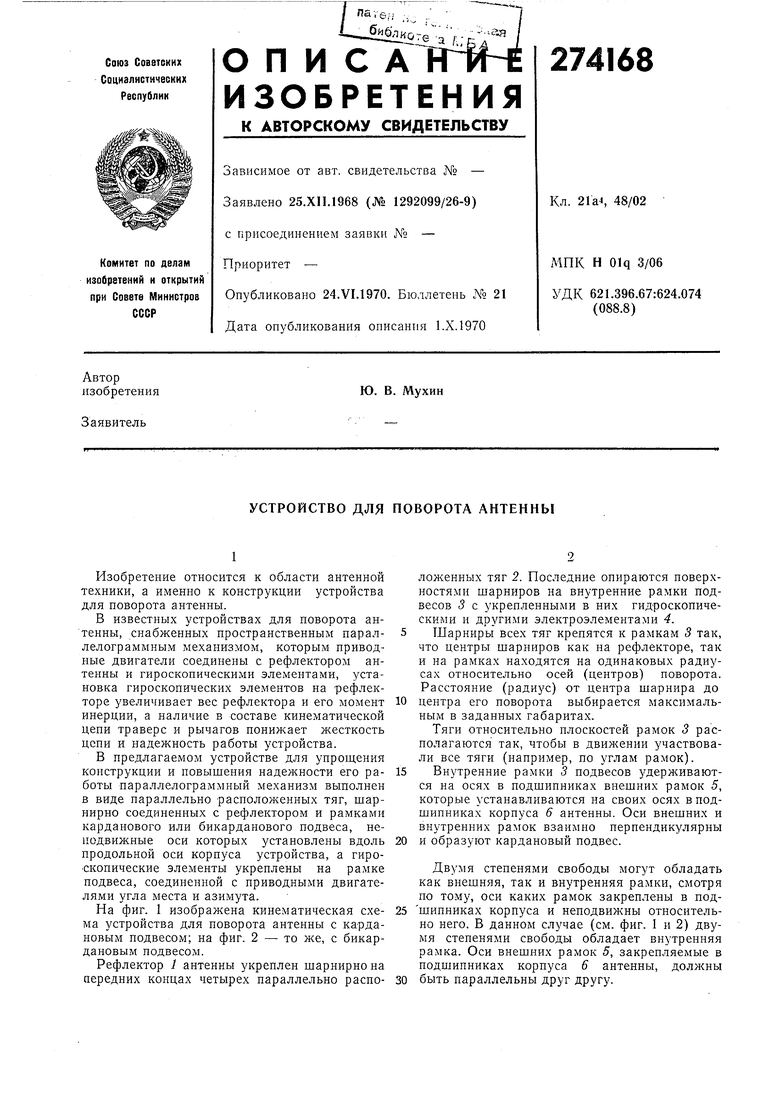
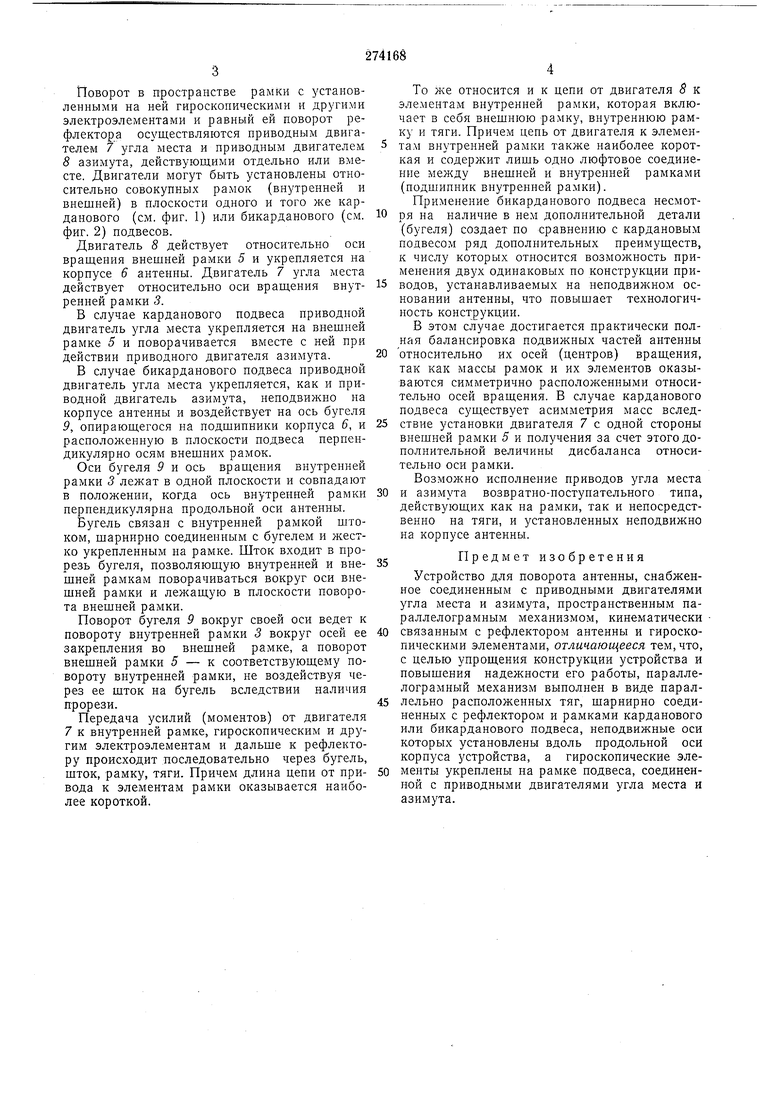
Фиг. 2
