1
Изобретение относится к области кузнечнопрессового производства.
Известна система управления гидравлическим ковочным прессом в режиме «шлихтовка, содержащая задающий генератор, выход которого через электронный усилитель подключен ко входу электромеханического преобразователя, управляющего клапанным распределителем пресса, регулирующим движение траверсы пресса, устройство контроля размеров поковки, а также логические схемы «И, «НЕ, «НУЛЬ-ОРГАН.
Основной недостаток известного устройства - низкая производительность и точность изготовления поковок.
Повыщение производительности и точности изготовления поковок обеспечивается тем, что система снабжена соединенным с выходами логических схем «И дополнительным управляющим триггером, вход которого соединен с задающим генератором, а также блоком реверса подвижной траверсы, подключенным ко входам логических схем «И и механически связанным с подвижной траверсой.
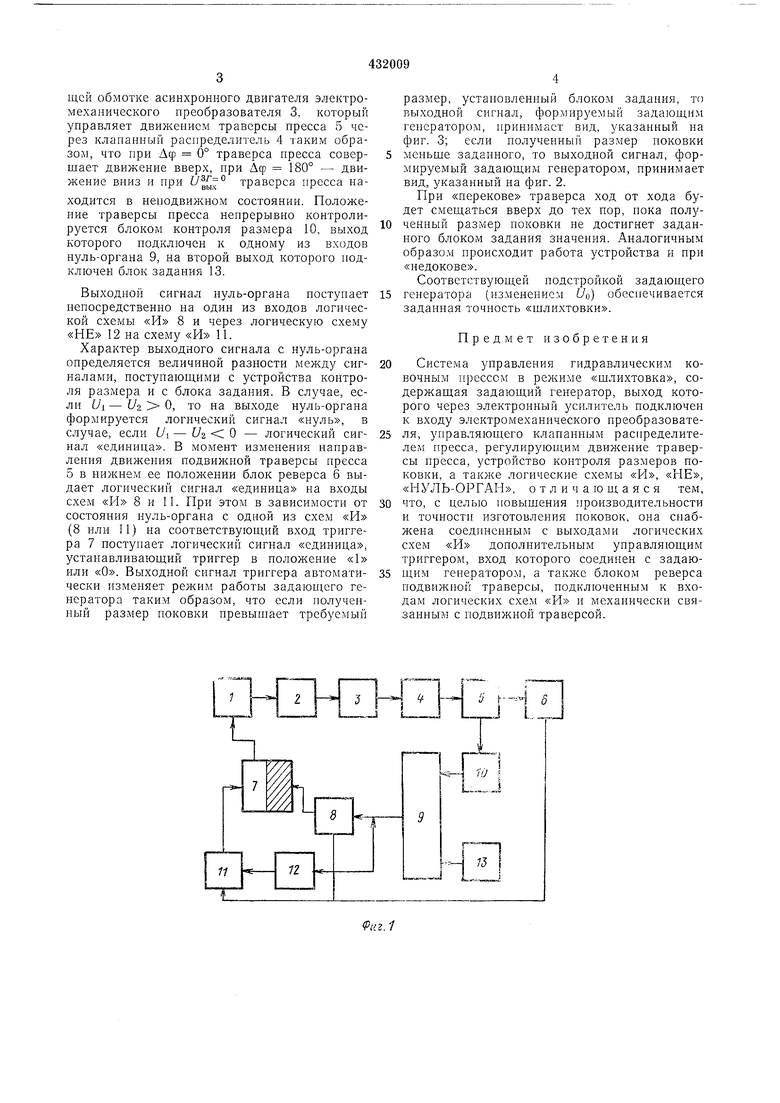
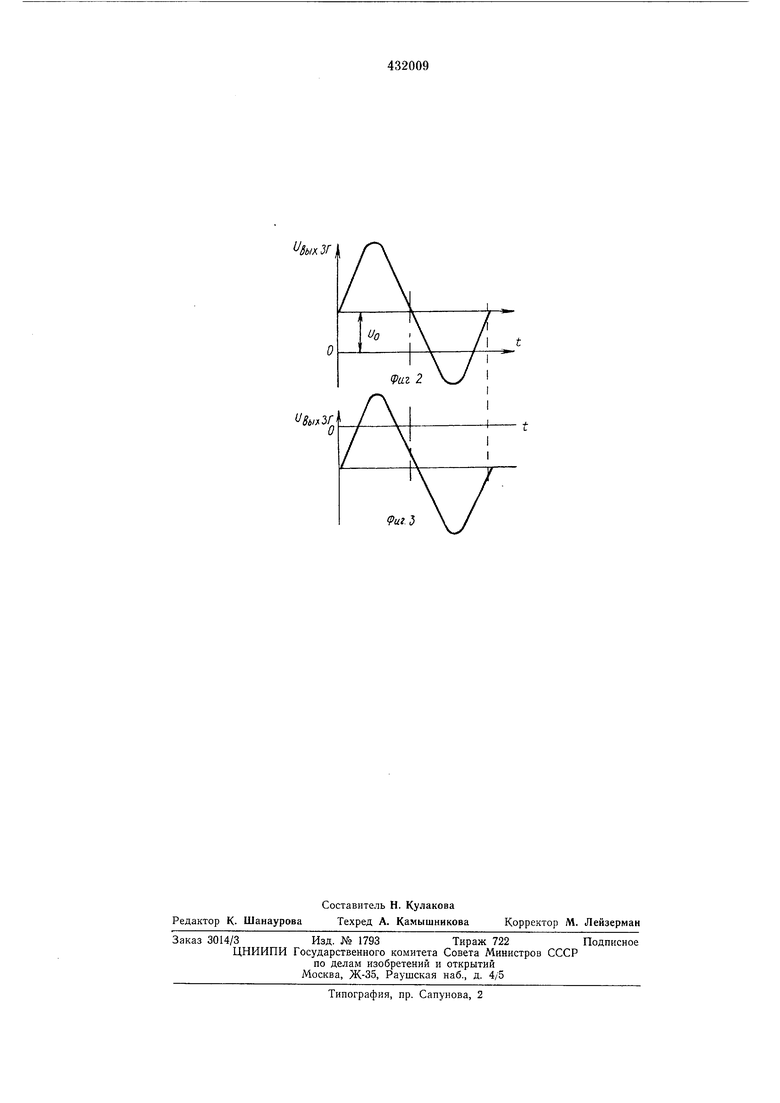
На фиг. 1 дана блок-схема предлагаемой системы управления; на фиг. 2 и 3 - графики изменения выходных сигналов.
Система управления содержит задающий генератор 1, выход которого через электронный усилитель 2 подключен ко входу электромеханического преобразователя 3, управляющего клапанным распределителем пресса 4, а через него подвижной траверсой пресса 5; блок реверса 6, соединенный посредством механической связи с подвижной траверсой пресса; триггер 7, выход которого соединен со входом задающего генератора, логическую схему «И 8; нуль-орган 9, устройство контроля размера 10, соединенное посредством
механической связи с подвижной траверсой пресса; логическую схему «И И, логическую схему «НЕ 12 и блок задаиия 13.
Работа системы управления осуществляется следующим образом.
Напряжение от задающего генератора 1 поступает на вход электронного усилителя 2, на выходе которого формируется переменное напрялсение частоты 50 гц, фаза которого относительно некоторого опорного напряжения
оп зависит от характера сигнала задающего генератора.
ОТ О
При t/Bbix СДВИГ фаз между (Уоп и выходным напряжением усилителя Дер 0°; при вых° сдвиг фаз Дф 180°. При зг о g iходное напряженпе усилителя отсутствует. Амплитуда выходного сигнала усилителя определяется как величиной входного напряжения, так и коэффициентом усиления усилителя. Выход усилителя подключен к управляющей обмотке асинхронного двигателя электромеханического преобразователя 3, который управляет движепием траверсы пресса 5 через клапанный распределитель 4 таким образом, что при ;Дф 0° траверса пресса совершает движение вверх, при Дф 180° - движение вниз и при f g{Jx° траверса пресса находится в неподвижном состоянии. Положение траверсы пресса непрерывно контролируется блоком контроля размера 10, выход которого подключен к одному из входов нуль-органа 9, на второй выход которого подключен блок задания 13.
Выходной сигнал нуль-органа поступает непосредственно на один из входов логической схемы «И 8 и через логическую схему «НЕ 12 на схему «И 11.
Характер выходного сигнала с нуль-органа определяется величиной разности между сигналами, поступающими с устройства контроля размера и с блока задания. В случае, если Ui - t/2 О, то на выходе нуль-органа формируется логический сигнал «нуль, в случае, если Ui - 2 О - логический сигнал «единица. В момент изменения направления движения подвижной траверсы пресса 5 в нижнем ее положении блок реверса 6 выдает логический сигнал «единица на входы схем «И 8 и II. При этом в зависимостп от состояния нуль-органа с одпой из схем «И (8 или 11) на соответствующий вход триггера 7 поступает логический сигнал «единица, устанавливающий триггер в положение «1 или «О. Выходной сигнал триггера автоматически изменяет режим работы задающего генератора таким образом, что если полученный размер поковки превышает требуемый
размер, установленный олоком задапия, то выходной сигнал, формпруемый задающим генератором, принимает вид, указанный на фиг. 3; если полученный размер поковки мепьше заданного, то выходной сигнал, формируемый задающим генератором, принимает вид, указанный на фиг. 2.
При «перекове траверса ход от хода будет смещаться вверх до тех нор, пока полученный размер поковки не достигнет заданного блоком задания значения. Аналогичным образом происходит работа устройства и при «недокове. Соответствующей подстройкой задающего
генератора (изменением L/o) обеспечивается заданная точность «шлихтовки.
Предмет изобретения
Система управления гидравлическим ковочным прессом в режиме «шлихтовка, содержащая задающий генератор, выход которого через электронный усилитель подключен к входу электромеханического нреобразователя, управляющего клапанным распределителем пресса, регулирующим движение траверсы нресса, устройство контроля размеров поковки, а также логические схемы «И, «ПЕ, «НУЛЬ-ОРГАН, отличающаяся тем,
что, с целью повышения производительности и точности изготовления поковок, она снабжена соединенным с выходами логических схем «И дополнительным управляющим триггером, вход которого соединен с задающим генератором, а также блоком реверса подвижной траверсы, подключенным к входам логических схем «И и механически связанным с подвижной траверсой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления гидравлическим ковочным прессом | 1977 |
|
SU749688A2 |
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU774967A1 |
| Устройство для управления гидравлическим прессом в режиме "шлихтовка | 1976 |
|
SU614975A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМ ПРЕССОМ | 1973 |
|
SU408827A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821205A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821204A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU200437A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМ ПРЕССОМ | 1972 |
|
SU323295A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU903212A1 |
| Регулятор торможения поперечиныгидРАВличЕСКОгО пРЕССА | 1979 |
|
SU821206A1 |
%«JAj
