Изобретение относится к захватным устройствам для грузов, снабженных цанфамИ, преимущественно для излучающих элементов, применяемых в радиационной технике.
Известны захватные устройства для грузов, снабженных цапфами, содержащие цилиндрический корнус, соединенный с грузоподъемным механизмом. Однако эти устройства не обеспечивают автоматический захват и расцепление с грузом.
Предлагаемое устройство отличается тем, что цилиндрический корпус снабжен одним или несколькими фигурными замкнутыми пазами, выполненными на его наружной или внутренней новерхности так, что каждый предыдущий наклонный участок паза имеет свое продолжение при пересечении с последующим наклонным участком.
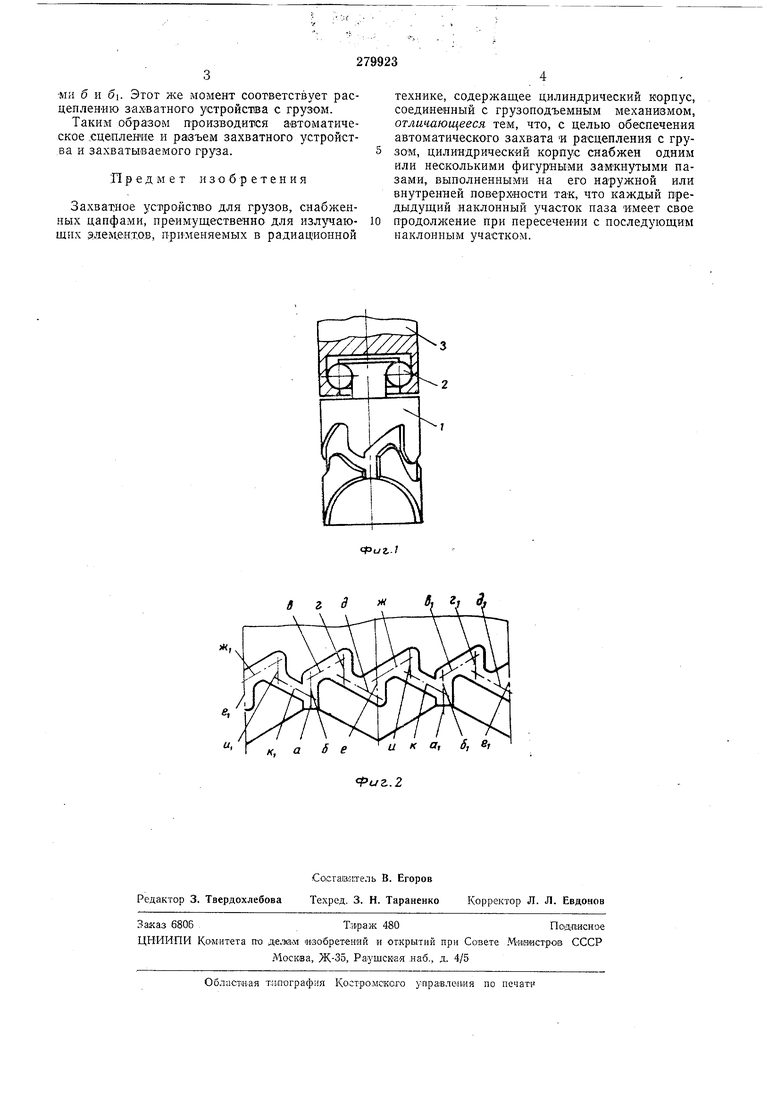
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - форма двух фигурных пазов (развертка в нлоскости).
На поверхности корпуса 1 выполнены два фигурных паза. В верхней части захватного устройства размещен узел 2, обеспечивающий дополнительную, например- вращательную, степень свободы корпуса относительно грузоподъемного механизма 3.
Сначала грузоподъемным механизмам 3 подводят корпус / к цапфам захватываемого груза. Операция захвата начинается в точках
а и ui. Корпус, опускаясь, улавливает цапфы,которые скользят по входным участкам б VL б пазов. Дальнейпшее скольжение цапф по наклонным участкам в и ei пазов при движениикорпуса вниз сопровождается его вращением до момента пересечения участков s и ei с участками г и г, после чего производится подъем корпуса. При подъеме ко-рпуса цапфы скользят по участкам г и г. Последующее скольжение цапф по наклонным участкам д и di сопровождается вращением корпуса до момента пересечения наклонных участков 5 и 5i с участками е и е. Этот же момент соответствует началу подъема захватываемого груза.
Опускание груза и его разъем с захватным устройством также происходит при движении грузоподъемного механизма по одной координате. После того, как груз опустится, корпус продолжает движение вниз. Цапфы скользят по участкам е и ei. Дальнейшее скольжение цапф по наклонным участкам ж и ж пазов при движении корпуса вниз сапровол дается его вращением до момента пересечения иаклонных участков дас и Ж1 с участками и и «ь после чего производится подъем корпуса. При подъеме цапфы захватываемого груза скользят по участкам и и и. Последующее скольжение цапф по наклонным участкам к; и KI сопровождается вращением корпуса до момента пересечения участков к; и к с участка-мн б и 6i. Этот же момент соответствует расцеплению захватного устройства с грузом.
Таким образом производится автоматическое .сцепление и разъем захватного устройства и захватываемого груза.
Предмет изобретения
Захватное ycTipowcTiBO для грузов, снабженных цапфами, преимущественно для излучающих элементов, п-рИменяемых в радиационной
технике, содержащее цилиндрический корпус, соединенный с грузоподъемным механизмом, отличающееся тем, что, с целью обеспечения автоматического захвата и расцепления с грузоМ, цилиндрический корпус снабжен одним или несколькими фигурными замкнутыми пазами, выполненными на его наружной или внутренней поверхности так, что каждый предыдущий наклонный участок паза имеет свое продолжение при пересечении с последующим наклонным участком.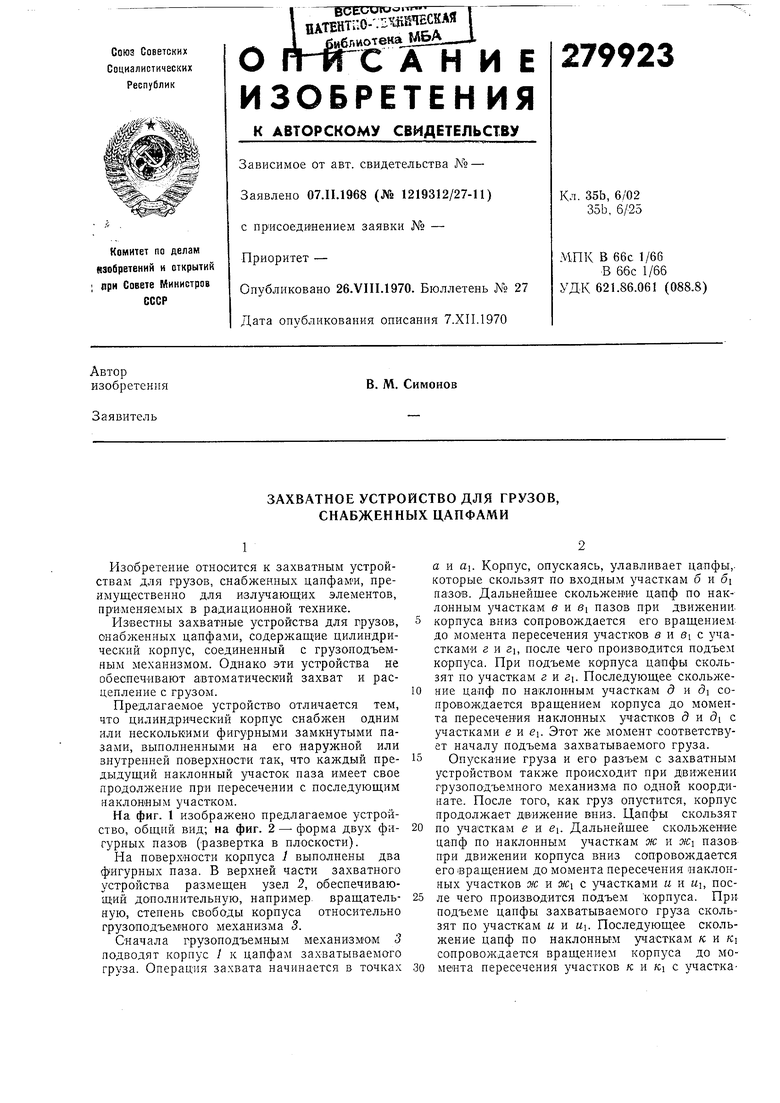
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С ФИГУРНОЙ ГОЛОВКОЙ | 2005 |
|
RU2295487C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С ФИГУРНОЙ ГОЛОВКОЙ | 1991 |
|
RU2034770C1 |
| Грузозахватное устройство | 1989 |
|
SU1728115A1 |
| Захватное устройство для грузов с фигурной головкой | 1977 |
|
SU727553A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Грузозахватное устройство | 1977 |
|
SU839978A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С УСТУПООБРАЗНЫМИ ПРОДОЛЬНЫМИ ДЕРЖАТЕЛЯМИ | 1990 |
|
RU2009100C1 |
| Устройство для захвата и разгрузкиКОНТЕйНЕРОВ C цАпфАМи | 1979 |
|
SU819041A1 |
| Захватная балка для маневрирования гидротехническими затворами с выдвижными штангами | 1978 |
|
SU732440A1 |
| Устройство для загрузки-выгрузки шахтных печей | 1978 |
|
SU789670A1 |
и к а, S, S,
ftJZ.Z
