Известны автооператоры, захватные органы которых совершают движение по замк-нутому контуру. Недостатком их является сложность кинематической схемы и изготовления назовых кулачков и отсутствие регулировки величины хода захватного органа в вертикальном и горизонтальном направлениях.
Предложенное устройство отличается от известных тем, что, с целью упрощения конструкции и создания возможности регулировки хода захватного органа, движущегося но замкнутому контуру, транспортирующий механизм выполнен в виде двух взаимно перпендикулярных щтоков, связанных между собой двуплечим Г-образным рычагом и смонтированных в подпружиненном ползуне, причем горизонтальный щток, связанный с кривощипно-шатунным приводом, снабжен регулируемыми упорами, воздействующими на упор, закреплеННый на ползуне.
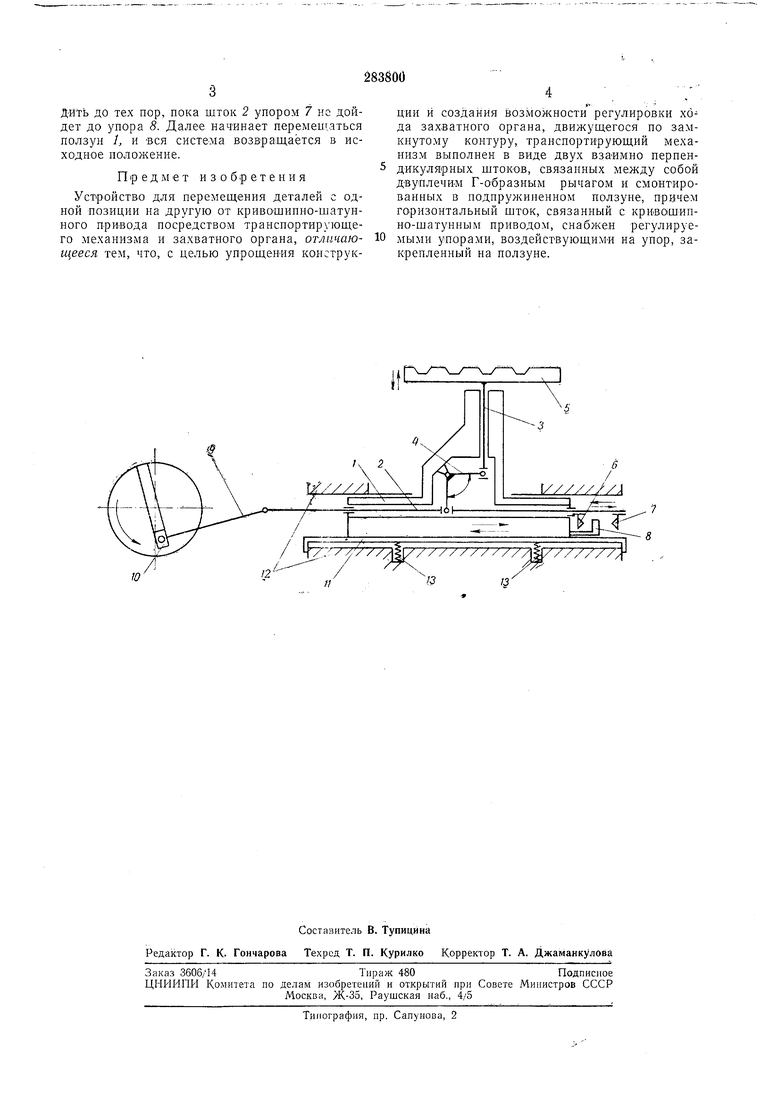
На чертеже изображено описываемое устройство.
Устройство для перемещения деталей с одной позиции на другую включает в себя ползун 1, в котором смонтированы горизонтальный 2 и вертикальный 3 щтоки, связанные между собой двуплечим рычагом 4. На щтоке 3 закреплен захватный орган 5, а на щтоке 2 - регулируемые упоры 6 и 7, между которыми расположен упор 8, нрикрепленный к
нолзуну /. Через щатун 9 UITOK 2 связан с криеощипом 10, радиус которого выполнен нереме)ным. Планка 11, помещенная в направляюп ую 12 и подпружиненная пружннамн 13, зажимает ползун /, тем самым препятствуя его свободному перемещению. Устройство работает следующим образом. При вращении кривошипа 10 (по стрелке указанной на чертеже) шатун 9 перемещает
щток 2 вправо. С помощью двуплечего рычага 4 щток 3 с захватным органом 5 будет передвигаться вверх до тех пор, пока щток 2 упором 6 не дойдет до упора 5. До этого момента ползун / остается неподвижным, так как
он поджат планкой 11. При дальнейщем вращении кривощипа 10 щток 2, воздействуя упором 6 на упор 8, перемещает ползун 1 вправо. В это время происходит перенос деталей с одной позиции на другую. Двил ение ползуна
вперед (вправо) заканчивается как только кривощип соверщит пол-оборота и щатун встанет в крайнее правое положение. Величину лодов можно изменять, регулируя упор 6 и меняя радиус кривошипа 10.
Соверщив -еще пол-оборота, кривошип 10 через шатун 9 переместит щток 2 влево. При этом через двупл ечий рычаг 4 переместится щток 3 с захватным органом 5. Последний опустится на величину, регулируемую упоДИть до тех пор, пока шток 2 упором 7 не дойдет до упора 8. Далее начинает перемещаться ползун 1, и вся система возвращается в исходное положение.
Предмет изобретения
Устройство для перемещения деталей с одной позиции на другую от кривощипно-шатунного привода посредством транспортирующего механизма и захватного органа, отличающееся тем, что, с целью упрощения конструкции и создания возможности регулировки хб да захватного органа, движущегося по замкнутому контуру, транспортирующий механизм выполнен в виде двух взаимно перпендикулярных штоков, связанных между собой двуплечим Г-Образным рычагом и смонтированных в подпружиненном ползуне, причем горизонтальный шток, связанный с кри1вашипно-шатунным приводом, снабжен регулируемыми упорами, воздействующими на упор, закрепленный на ползуне.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения деталей с одной позиции на другую | 1983 |
|
SU1103988A2 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| ШВЕЙНАЯ МАШИНА | 1971 |
|
SU414334A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Поворотный зажимной патрон | 1976 |
|
SU727335A1 |
| Автооператор | 1980 |
|
SU872196A1 |
| Устройство для подачи заготовок в рабочую зону пресса | 1972 |
|
SU444590A1 |
| Силовой орган механического пресса | 1980 |
|
SU893572A1 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
