(54) АВТООПЕРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1981 |
|
SU1047653A1 |
| Устройство для отделения от стопы плоской заготовки и подачи ее в пресс | 1984 |
|
SU1319980A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Поворотный зажимной патрон | 1976 |
|
SU727335A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Машина для сборки изоляторов | 1986 |
|
SU1403107A1 |
| Устройство для подачи поддонов | 1980 |
|
SU899391A1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
1
Изобретение относится к машиностроению и предназначено для транспортировки деталей, в частности, длинномерных.
Известен автооператор, содержащий исполнительный орган с захватами и приводы вертикального перемещения и поворота исполнительного органа 1.
Недостатками известного устройства являются значительные динамические нагрузки и сложность конструкции.
Цель изобретения - уменьщение инерционных нагрузок и упрощение конструкции автооператора.
Цель достигается тем, что привод поворота снабжен кривощипно-щатунным механизмо, а привод вертикального перемещения выполнен в виде поворотного цилиндра, причем кривощипно-шатунный механизм кинематически связан с этим цилиндром.
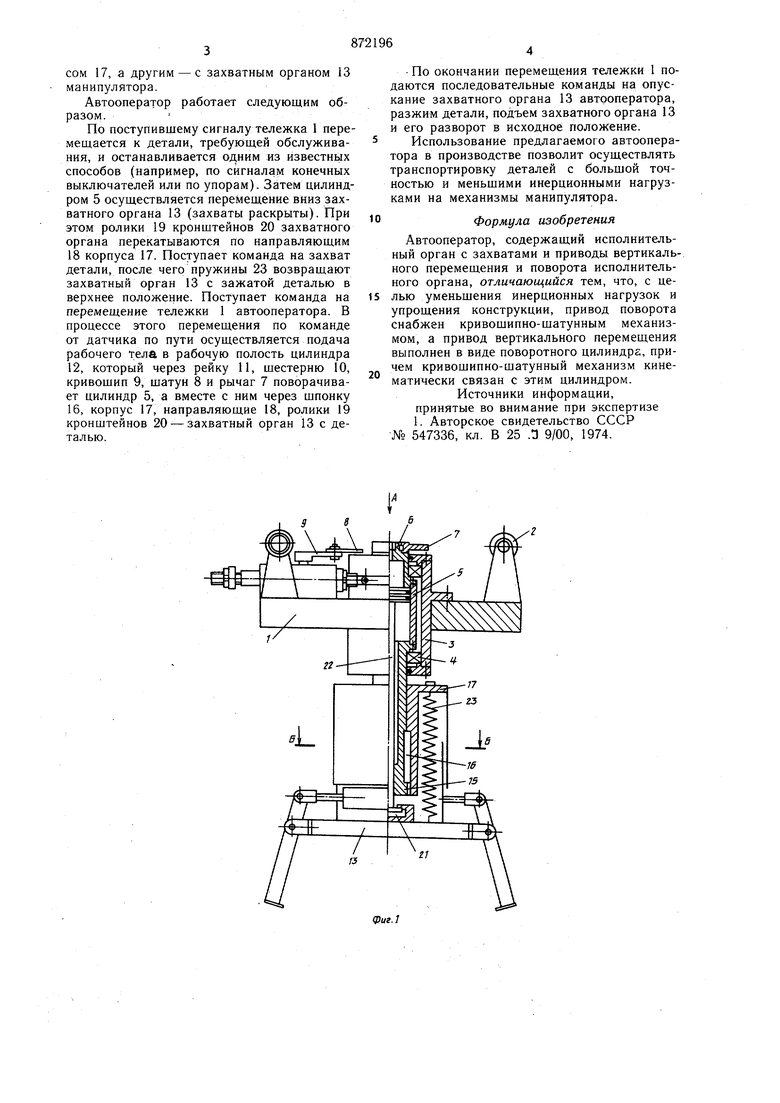
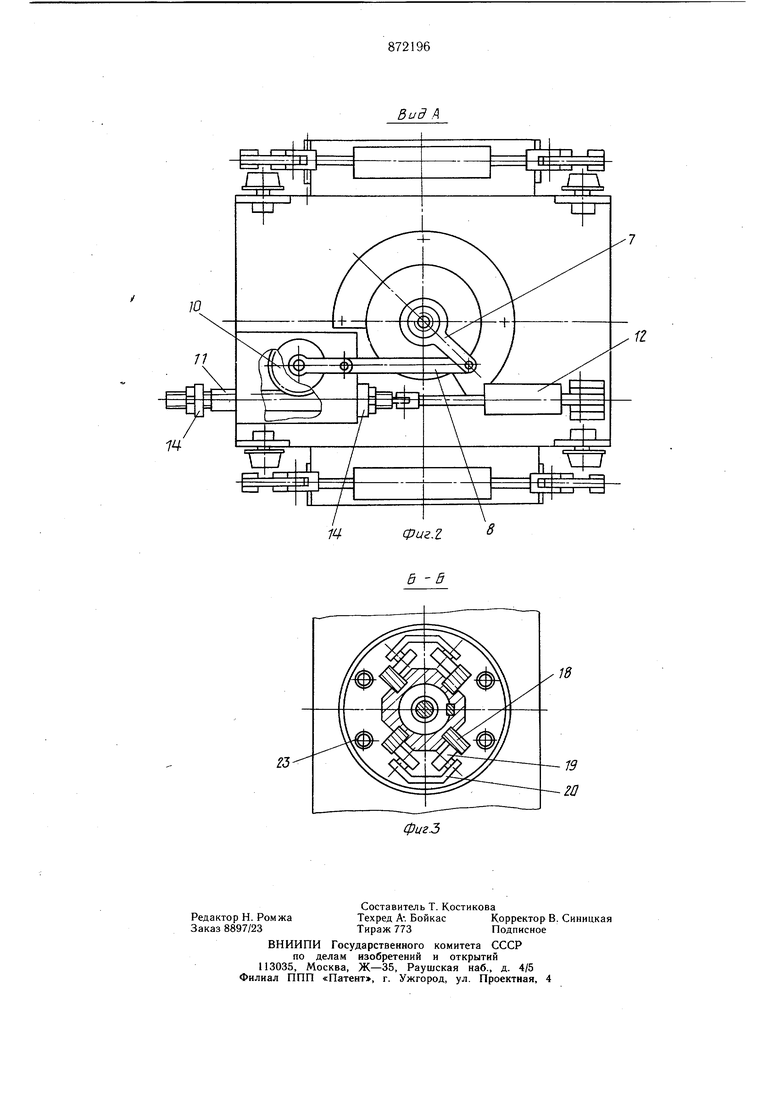
На фиг. 1 изображен предлагаемый автооператор, общий вид; на фиг. 2 - вид А на фиг 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Тележка 1, на которой смонтирован автооператор, перемещается по направляющим с помощью роликов 2. На тележке 1 жестко закреплен корпус 3, в который на подшипниках 4 установлен поворотный цилиндр 5 одностороннего действия. На крыщку 6 цилиндра 5 насажен рычаг 7, щарнирно связанный с щатуном 8, который шарнирно соединен с кривощипом 9, насаженным на ось щестерни 10, находящейся в зацеплении с рейкой 11. Рейка 11 соединена со щтоком цилиндра 12 поворота захватного органа 13 авторператора вокруг вертикальной оси. Рейка 11 имеет регулируемые упоры 14, которые позволяют отрегулировать исходное угловое положение захватного органа 13 относитель10на оси перемещения тележки 1. Путем подбора определенного соотнощения длин рычага 7 и кривошипа 9 достигается необходимая величина поворота захватного органа 13 автооператора.
s
На крышке 15 поворотного цилиндра 5 закреплен с использованием шпонки 16 корпус 17, имеющий направляющие 18 для роликов 19 кронштейнов 20, закрепленных на захватном органе 13 манипулятора. С зах20ватным органом 13 с помощью пяты 21 соединен щток 22 цилиндра 5. Возвратные пружины 23 одним концом соединены с корпусом 17, а другим -с захватным органом 13 манипулятора.
Автооператор работает следующим образом.
По поступившему сигналу тележка 1 перемещается к детали, требующей обслуживания, и останавливается одним из известных способов (например, по сигналам конечных выключателей или по упорам). Затем цилиндром 5 осуществляется перемещение вниз захватного органа 13 (захваты раскрыты). При этом ролики 19 кронштейнов 20 захватного органа перекатываются по направляющим 18 корпуса 17. Поступает команда на захват детали, после чегопружины 23 возвращают захватный орган 13 с зажатой деталью в верхнее положение. Поступает команда на перемещение тележки 1 автооператора. В процессе этого перемещения по команде от датчика по пути осуществляется подача рабочего тела в рабочую полость цилиндра 12, который через рейку 11, щестерню 10, кривошип 9, шатун 8 и рычаг 7 поворачивает цилиндр 5, а вместе с ним через щпонку 16, корпус 17, направляющие 18, ролики 19 кронштейнов 20 -захватный орган 13 с деталью.
. По окончании перемещения тележки 1 подаются последовательные команды на опускание захватного органа 13 автооператора разжим детали, подъем захватного органа 14 и его разворот в исходное положение.
Использование предлагаемого автооператора в производстве позволит осуществлять транспортировку деталей с большой точностью и меньшими инерционными нагрузками на механизмы манипулятора. Формула изобретения Автооператор, содержащий исполнительный орган с захватами и приводы вертикального перемещения и поворота исполнительного органа, отличающийся тем, что, с целью уменьшения инерционных нагрузок и упрощения конструкции, привод поворота снабжен кривощипно-щатунным механизмом а привод вертикального перемещения выполнен в виде поворотного цилиндра, причем кривошипно-щатунный механизм кинематически связан с этим цилиндром.
Источники информации, принятые во внимание при экспертизе 1 Авторское свидетельство СССР № 547336, кл. В 25 .3 9/00, 1974.
