Известны шагающие конвейеры, в которых перемещение груза осуществляется посредством носителя, совершающего возвратно-поступательное движение в горизонтальной плоскости и подъем, опускание в вертикальной плоскости от двуплечих рычагов.
Такие шагающие конвейеры не обеспечивают прижим груза на рабочих позициях к элементам сопряженного с конвейером технологического оборудования.
Предлагаемый шагающий конвейер, в котором перемещение груза, например листового материала, осуществляется посредством носителя, а прижим на рабочей позиции к элементам сопряженного с конвейером технологического оборудования, например, посредством штанг, смонтированных на двуплечих рычагах подъема носителя, отличается тем, что, с целью согласования циклов «шагов и «прижимов в противофазе, рычаги подъема носителя на рабочей позиции снабжены дополнительным плечом, воздействующим через штангу, с которой он связан шарнирно, или непосредственно на прижимаемое изделие.
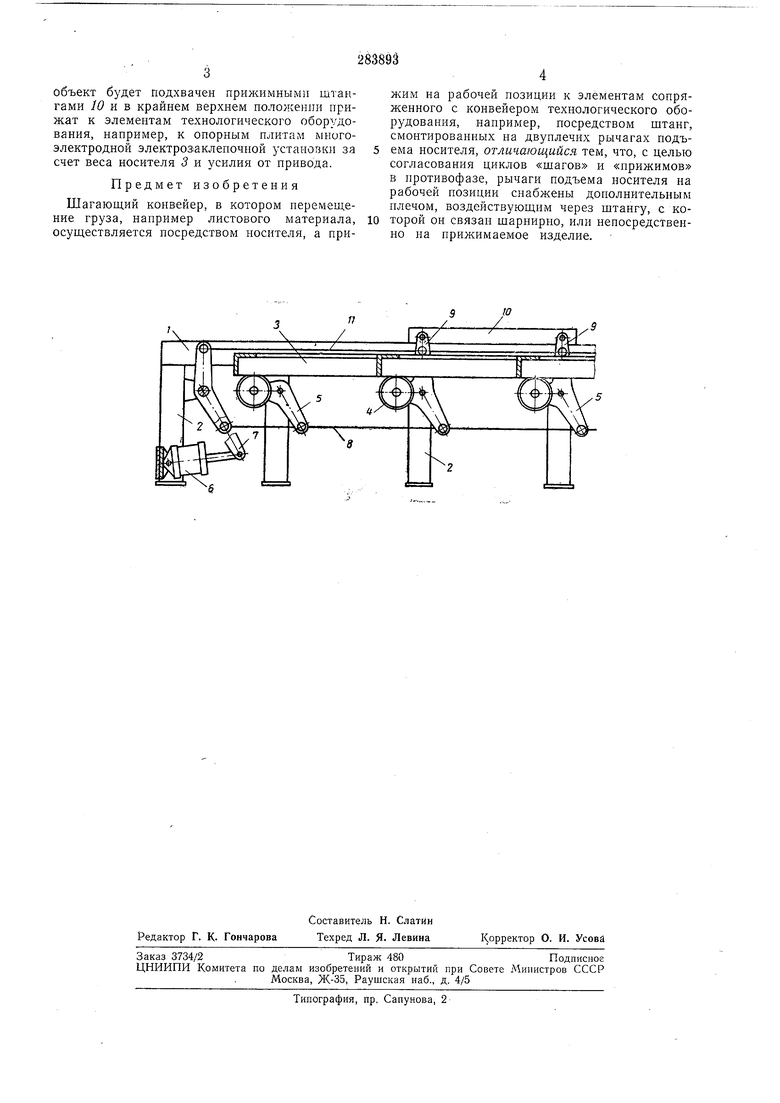
На чертеже схематично изображен описываемый конвейер.
следние являются исполнительными органами механизма вертикального перемещения носителя 3, который представляет собой шарнирно установленный на одной из стоек 2 пневмо- или гидроцилиндр 6. Шток пневмоили гидроцилиндра щарнирно связан с рычагом-коромыслом 7, в свою очередь связанным гибкой тягой 8 с рычагами 5. В местах установки технологического оборудования все рычаги 5 или часть из них выполнены заодно с подъемными рычагами 9, несущими на концах щарнирно закрепленные прижимные штанги 10 или иные по конструкции, но тождественные по функции элементы.
Для повышения усилия прижима транспортируемого объекта к элементам технологического оборудования рычаги 9 могут быть дополнительно связаны с пневмо- или гидроцилиндром 6, в частности гибкой тягой 11. При
ЭТОМ рычаг-коромысло 7 выполнен удлиненным.
Работает шагающий конвейер следующим образом. При утопленном щтоке пневмо- или гидроцилиндра 6 катки 4 и носитель 3 находятся в крайнем верхнем, а прижимные штанги 10 - в крайнем нижнем положениях. По мере выдвижения штока из пневмо- или гидроцилиндра катки и носитель опускаются. В одном из объект будет подхвачен прижимными штангами 10 и -в крайнем верхием положении прижат к элементам технологического оборудования, например, к опорным плитам многоэлектродной электроз:аклепочной устаиозки за счет веса носителя 3 и усилия от привода. Предмет изобретеиия Шагающий конвейер, в котором перемещение груза, например листового материала, осуществляется посредством носителя, а прижим на рабочей позиции к элементам сопряженного с конвейером технологического оборудования, например, посредством штанг, смонтированных на двуплечих рычагах подъема носителя, отличающийся тем, что, с целью согласования циклов «шагов и «прижимов в противофазе, рычаги подъема носителя на рабочей позиции снабжены дополнительным плечом, воздействующим через штангу, с которой он связан шарнирно, или непосредственно на прижимаемое изделие.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий конвейер | 1980 |
|
SU905167A1 |
| РЫЧАЖНЫЙ ФИКСАТОР ДЛЯ ОРИЕНТАЦИИ И ЗАЖИМАИЗДЕЛИЙ | 1970 |
|
SU275840A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1969 |
|
SU239113A1 |
| Клещевой захват для штучных грузов | 1978 |
|
SU785174A1 |
| Привод шагающего конвейера | 1979 |
|
SU876530A1 |
| Вертикальный накопитель для штучных грузов | 1985 |
|
SU1303504A1 |
| Автомат-укладчик плит | 1983 |
|
SU1138330A1 |
| Установка для укладки предметов в тару | 1987 |
|
SU1433852A2 |
| Крутонаклонный ленточный конвейер | 1975 |
|
SU810567A1 |
| Поддержка для одноударной клепки | 1984 |
|
SU1291273A1 |
