Известен экскаватор для погрузо-разгрузочных работ, включающий погрузо-разгрузочное устройство, которое установлено на самоходном шасси, имеющем поворотную платформу.
Цель изобретения - уменьщить энергозатраты при погрузо-разгрузочных работах. Достигается это тем, что погрузо-разгрузочное устройство смонтировано на подвижной, шарнирно соединенной с поворотной платформой раме и выполнено в виде расположенных параллельно друг другу прямых лопат, каждая из которых имеет рукоять и установлена с возможностью, возвратно-поступательного перемещения и подъема относительно рамы. Каждая прямая лопата связана с механизмами подачи и опрокидывания, размещенными на той же раме.
Кроме того, каждый механизм подачи может быть выполнен с бесконечной лентой, имеющей параллельные участки, в одно из звеньев которой вмонтирована напорная каретка. На одном из концов вала последней закреплены подвижные ролики, взаимодействующие с рукоятью прямой лопаты. Механизм опрокидывания каждой лопаты может быть выполнен в виде полой трубы с образованным в ней винтовым пазом, внутри которой расположен свободный конец рукояти лолаты, связанный с разгрузочной кареткой, взаимодействующей посредством катков с винтовым наружным уширением паза.
Чтобы обеспечить плавное взаимодействие механизмов подачи и опрокидывания, последний может быть установлен на раме с возможностью качания.
Каждая лопата погрузо-разгрузочного устройства может быть установлена с возможностью перемещения вдоль рукояти и подпружинена.
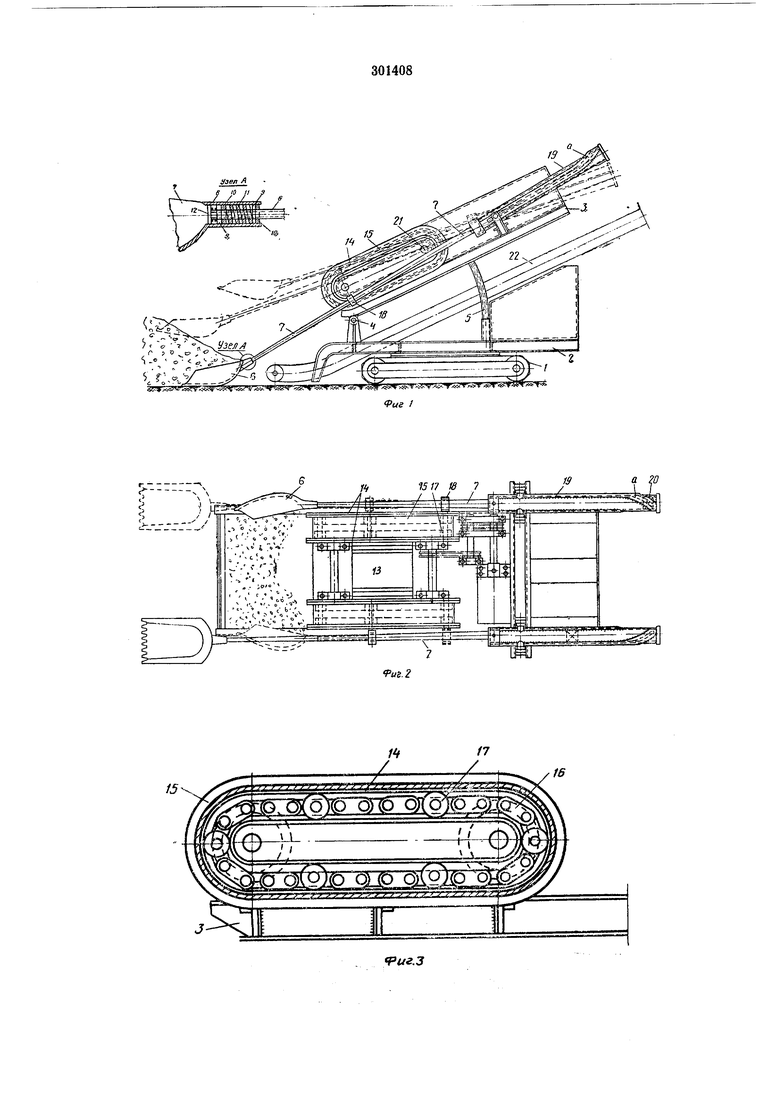
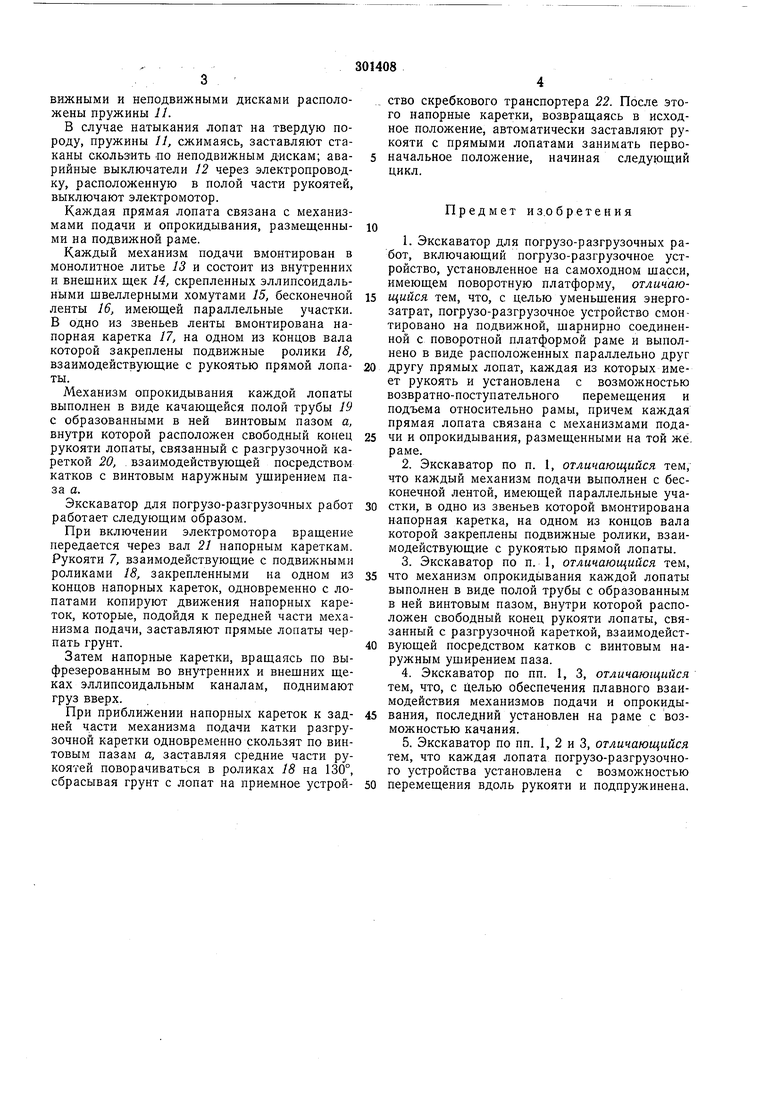
На фиг. 1 изображен предлагаемый экскаватор, вид сбоку; на фиг. 2 - то же, в плане; на фиг. 3 - детали механизма подачи.
Экскаватор включает самоходное щасси / с поворотной платформой 2 и погрузо-разгрузочное устройство, смонтированное на подвижной раме 3, которая соединена с поворотной платформой вертикальными шарнирами 4 и радиальными штангами 5.
Погрузо-разгрузочное устройство выполнено в виде расположенных параллельно друг другу прямых лопат 6 трапецеидального сечения, каждая из которых имеет рукоять 7 и установлена с возможностью возвратно-поступательного перемещения и подъема относительно рамы -при помощи встроенных в заднюю часть прямых лопат цилиндрических стаканов 8 с неподвижными дисками 9. С последними соприкасаются подвижные диски 10, соединенные со стаканом болтами. Между подвижными и неподвижными дисками расположены пружины 11.
В случае натыкания лопат на твердую породу, пружины II, сжимаясь, заставляют стаканы скользить по неподвижным дискам; аварийные выключатели 12 через электропроводку, расположенную в полой части рукоятей, выключают электромотор.
Каждая прямая лопата связана с механизмами подачи и опрокидывания, размещенными на подвижной раме.
Каждый механизм подачи вмонтирован в монолитное литье 13 и состоит из внутренних и внешних пдек 14, скрепленных эллипсоидальными швеллерными хомутами 15, бесконечной ленты 16, имеющей параллельные участки. В одно из звеньев ленты вмонтирована напорная каретка 17, на одном из концов вала которой закреплены подвижные ролики 18, взаимодействующие с рукоятью прямой лопаты.
Механизм опрокидывания каждой лопаты выполнен в виде качающейся полой трубы 19 с образованными в ней винтовым пазом а, внутри которой расположен свободный конец рукояти лопаты, связанный с разгрузочной кареткой 20, взаимодействующей посредством катков с винтовым наружным уширением паза а.
Экскаватор для погрузо-разгрузочных работ работает следующим образом.
При включении электромотора вращение передается через вал 21 напорным кареткам. Рукояти 7, взаимодействующие с подвижными роликами 18, закрепленными на одном из концов напорных кареток, одновременно с лопатами копируют движения напорных кареток, которые, подойдя к передней части механизма подачи, заставляют прямые лопаты черпать грунт.
Затем напорные каретки, вращаясь по выфрезерованным во внутренних и внешних щеках эллипсоидальным каналам, поднимают груз вверх.
При приближении напорных кареток к задней части механизма подачи катки разгрузочной каретки одновременно скользят по винтовым пазам а, заставляя средние части рукоятей поворачиваться в роликах 18 на 130°, сбрасывая грунт с лопат на приемное устройство скребкового транспортера 22. После этого напорные каретки, возвращаясь в исходное положение, автоматически заставляют рукояти с прямыми лопатами занимать первоначальное положение, начиная следу1ощий цикл.
предмет из.обретения
1.Экскаватор для погрузо-разгрузочных работ, включающий погрузо-разгрузочное устройство, установленное на самоходном щасси, имеющем поворотную платформу, отличающийся тем, что, с целью уменьшения энергозатрат, погрузо-разгрузочное устройство смонтировано на подвижной, шарнирно соединенной с поворотной платформой раме и выполнено в виде расположенных параллельно друг
другу прямых лопат, каждая из которых имеет рукоять и установлена с возможностью возвратно-поступательного перемещения и подъема относительно рамы, причем каждая прямая лопата связана с механизмами подачи и опрокидывания, размещенными на той же, раме.
2.Экскаватор по п. 1, отличающийся тем, что каждый механизм подачи выполнен с бесконечной лентой, имеющей параллельные участки, в одно из звеньев которой вмонтирована напорная каретка, на одном из концов вала которой закреплены подвижные ролики, взаимодействующие с рукоятью прямой лопаты.
3.Экскаватор по п. 1, отличающийся тем, что механизм опрокидь1вания каждой лопаты
выполнен в виде полой трубы с образованным в ней винтовым пазом, внутри которой расположен свободный конец рукояти лопаты, связанный с разгрузочной кареткой, взаимодействующей посредством катков с винтовым наружным уширением паза.
4.Экскаватор по пп. 1, 3, отличающийся тем, что, с целью обеспечения плавного взаимодействия механизмов подачи и опрокидывания, последний установлен на раме с возможностью качания.
5.Экскаватор по пп. 1, 2 и 3, отличающийся тем, что каждая лопата погрузо-разгрузочного устройства установлена с возможностью
перемещения вдоль рукояти и подпружинена.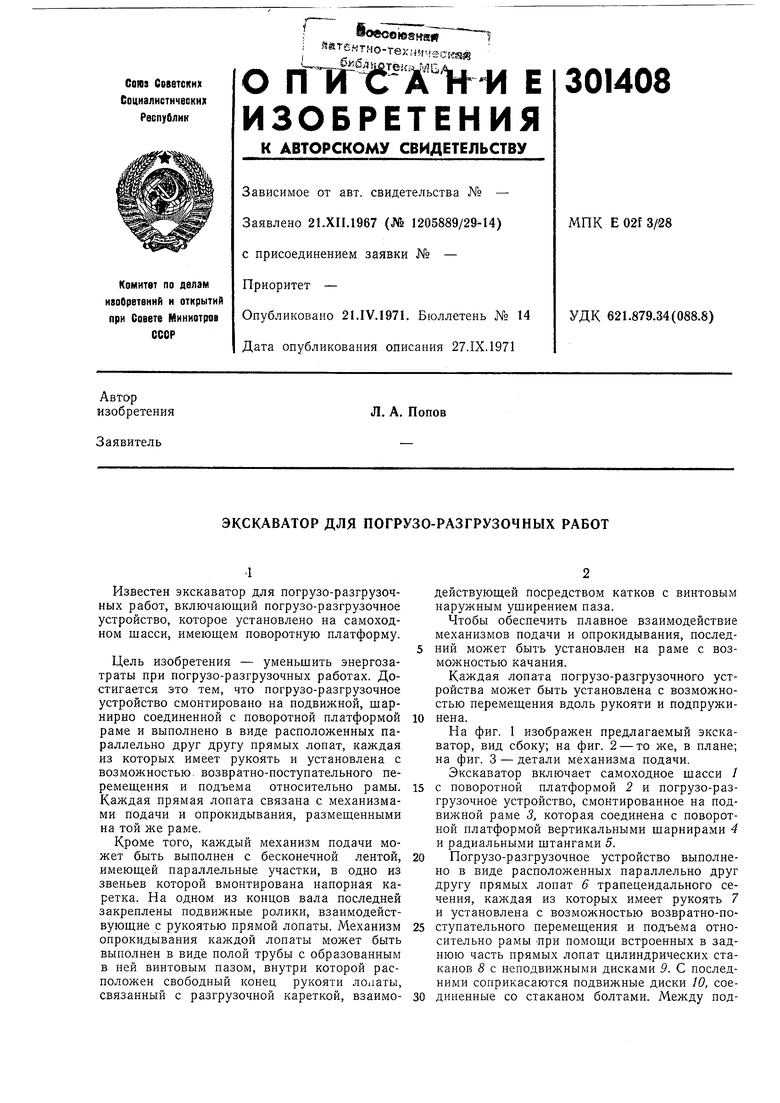
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для длинномерных материалов | 1950 |
|
SU89549A1 |
| Экскаватор - прямая механическая лопата | 1988 |
|
SU1661285A1 |
| Экскаватор и его поворотная платформа | 1986 |
|
SU1379412A1 |
| Стекерный экскаватор-лопата | 1947 |
|
SU79777A1 |
| Рабочее оборудование экскаватора | 1990 |
|
SU1756467A1 |
| Одноковшовый карьерный экскаватор | 1989 |
|
SU1745821A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1967 |
|
SU192087A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОБРАТНОЙ ЛОПАТЫ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2004 |
|
RU2266371C1 |
| Траншейный экскаватор | 1979 |
|
SU815154A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |