Изобретение относится к тра«спортированию грузов иодвесными грузонесущими конвейерами.
Известны нодвесные груаонесущие конвейеры, содержащие ходовой нуть, по которому нри номощи тягового органа перемещаются каретки, несущие грузовые подвески, и снабженные подвижными поворотными устройствами, выполненными в виде поворотных звездочек, смонтированных на подвижных ра.мах, несущих отрезок ходового пути, соединенные с ходовым путем конвейера раздвижными стыками. Однако в известных конвейерах каждое поворотное устройство имеет индивидуальный привод для его перемещения при остановке тягового органа на участке между поворотными устройствами без выключения основного привода конвейера. В некоторых случаях требуется полная синхронизация работы этих приводов, которую трудно достичь.
Целью изобретения является повыщение надежности работы конвейера при временных остановках тягового органа и упрощение его ко}1струкиии.
Это достигается тем, что подвижные рамы поворотных устройств попарно связаны гибкой связью, причем одна из них снабжена привОлТ.ом возврата в исходное положение.
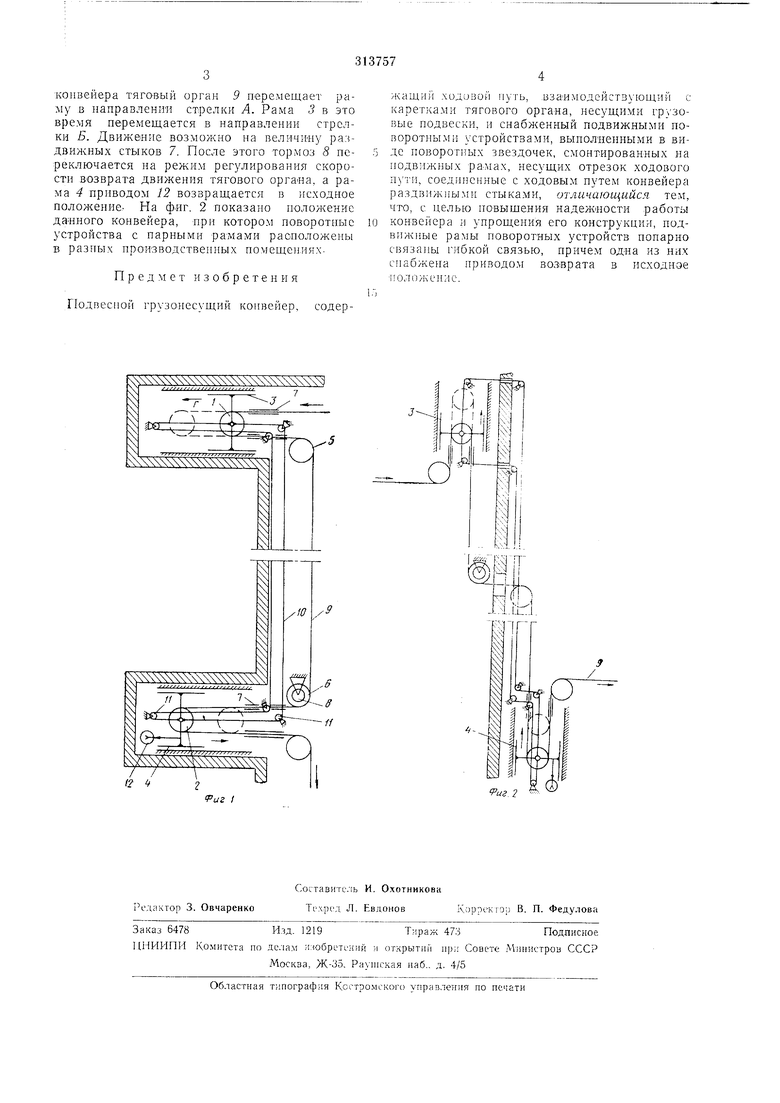
вейер, общий вид; на фиг. 2 то , в другом положении.
Описываемый конвейер содержит ходовой иугь и снабжен поворотными устройствами,
выполненными в виде поворотных звездочек У и .2, смонтированных на подвижных рамах 3 и 4, несущих отрезки ходового пути. Эти отрезки соединены с ходовым путем и с отрезком ходового пути (мелчду нёподвил ными
поворотными устройствами 5 и 6, ъ месте погрузки или разгрузки подвесок) раздвимшыми стыками 7. На поворотном устройстве 6 смонтирован тормоз 8 тягового органа 9Подв1 жные рамы 3 4 соединены между собой гибкой связью W, например тросом, обегающим блоки 11. Рама 4 снабжена приводом 12 возврата ее в исходное положение. В.место привода может быть использован противовес.
При расторможенном тормозе 8 и движении всего тягового органа конвейера с каретками, в том числе и но отрезку ходового пути между неподвиЖНы.ми устройствами 5 и 6, рама 4 удерживается приводом 12 в крайнем положеНИИ У-У, а рама 3, соединенная гибкой связью 10 с рамой 4, - в крайнем полол ении II-И (см. фиг. 1). Остановка тягового органа с подвесками на отрезке ходового пути между устройстами 5 и 6 производится тормоконвейера тяговый орган 9 перемещает раму в направлении стрелки А. Рама 3 в это время перемещается в направлении стрелки Б. Движение возможно на величину ра.чдвижных стыков 7. После этого тормоз 8 переключается на режим регулировання скорости возврата движения тягового органа, а рама 4 приводом 12 возвращается в исходное полож;ение. На фдг. 2 показано положение данного конвейера, при котором поворотные устройства с парными рамами расположены в разных производственных помещениях.
Предмет изобретения Подвесной грузоиесущий конвейер, содержащии ходи13ои путь, вза имодеиствующий с каретками тягового орга-на, несущими грузог5ые подвески, и снабженный подвижными поворотными устройствами, выполненными в виде новоротных звездочек, смонтированных на подвижных ра-мах, несущих отрезок ходового пути, соединенные с ходовым путем конвейера раздвижными стыками, отличающийся тем, что, с целью повышения надежности работы конвейера и упрощения его конструкции, подвижные рамы поворотных устройств попарно связаны гибкой связью, причем одна из них снабжена приводом возврата в исходное Поло/кеиис.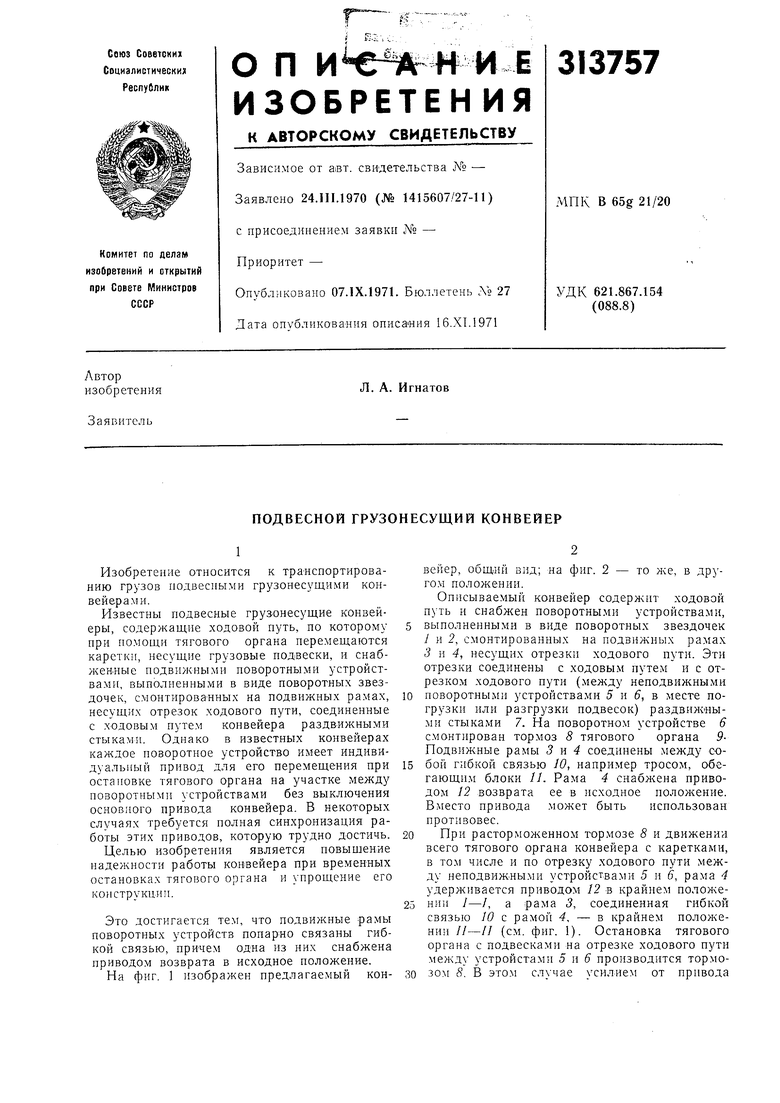
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСНОЙ ГРУЗОНЕСУЩИЙ КОНВЕЙЕР | 1969 |
|
SU243497A1 |
| ПОДВЕСНОЙ ГРУЗОНЕСУЩИЙ КОНВЕЙЕР | 1970 |
|
SU261253A1 |
| ПОДВЕСНОЙ ГРУЗОНЕСУЩИЙ КОНВЕЙЕР | 1970 |
|
SU269005A1 |
| Подвесной грузонесцщий конвейер | 1976 |
|
SU659467A1 |
| Подвесной грузонесущий конвейер | 1986 |
|
SU1330047A1 |
| Устройство для кантования изделий на конвейере | 1983 |
|
SU1098878A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| Устройство для отделения листа от стопы,кантования и подачи его в зону обработки | 1981 |
|
SU977086A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| Подвесной конвейер | 1977 |
|
SU735502A1 |
fiJZ I
fus.2
