со
00 00
ч
00
Изобретение относится к машиностроению, а именно к устройствам для кантования крупногабаритных изделий на конвейере, и может быть использовано, в частности, для кантования сельскохозяйственных машин при выполнении сборочных работ на конвейере.
Известно устройство для кантования изделий на конвейере, включающее установленную на основании раму, несущую на горизонтальных поворотных осях захваты и механизм подъема lj .
В данном устройстве захваты выполнены неприводными и отсутствует их ориентация относительно изделия при его захвате.
Наиболее близким к изобретению по технической сущности и достигаемому
результату является устройство для кантования изделий на конвейере, вклю чающее установленную на основании раму, несущую на горизонтальных поворотных осях приводные захваты и расположенные с боковых сторон конвейера вертикальные штанги с механизмом подъема zj .
В известном устройстве требуется довольно точная остановка конвейера с изделием относительно захватов, что снижает надежность работы устройства в целом и его производительность
Целью изобретения является повыше.ние надежности и производительности устройства.
Поставленная цель достигается тем, что в устройстве для кантования изделий на конвейере, включающем установленную на основании раму, несущую на горизонтальных поворотных осях приводные захваты и расположенные с боковых сторон . конвейера вертикальные штанги с механизмом подъема, рама установлена на основании подвижно посредством смонтированного на последнем вдоль конвейера отрезке ходового пути, имеющего по концам ограничительные упоры, при этом механизм подъема смонтирован на раме, а нижние концы вертикальных штанг, расположенных с калсдой боковой стороны конвейера, связаны между собой посредством опорного башмака, установленного над отрезком ходового пути с возможностью взаимодействия с последним, причем конвейер имеет упоры, а башмаки - выдвижные ловители, установленные с возможностью взаимодействия с упорами в момент отключения конвейера.
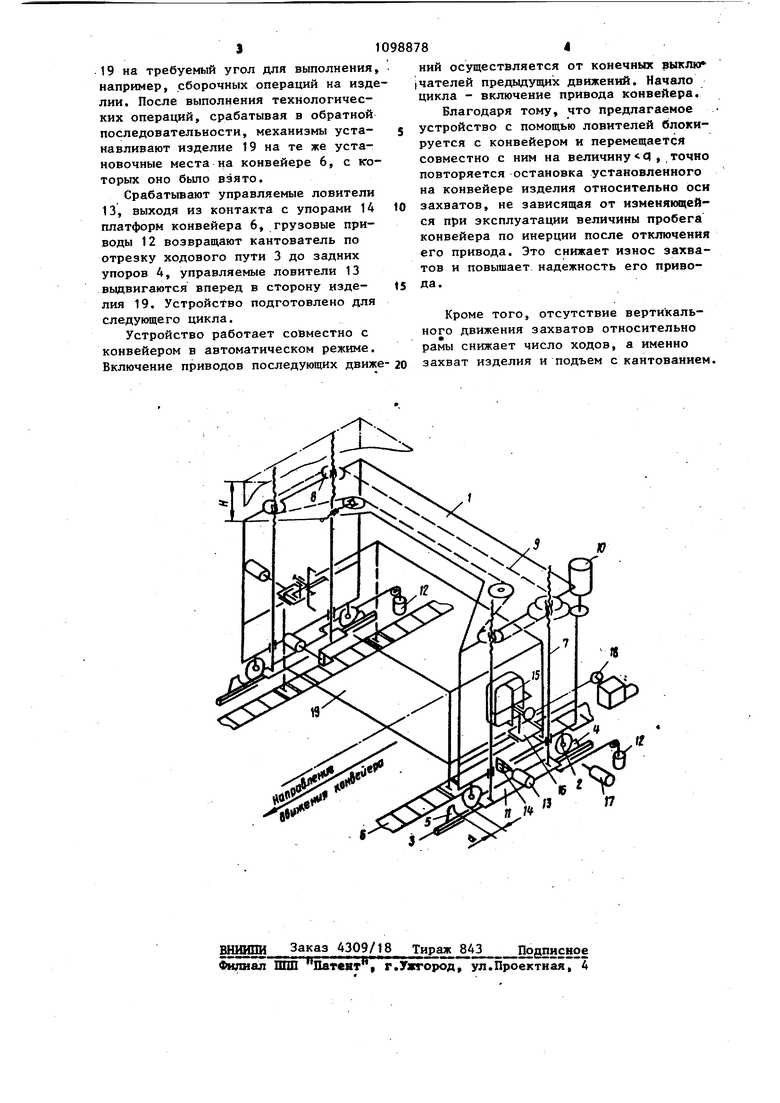
На чертеже показана кинематическая схема устройства в аксонометрии.
Устройство содержит П-образную раму 1, установленную опорами 2 качения на основании через отрезок ходового пути 3, ограниченный задними упорами 4 и упорами 5 передними,и расположенную вдоль транспортного конвейера 6. Механизм подъема, смонтированный на раме 1, образован вертикальными штангами 7, имеющими сверху винтйвые нарезки, взаимодействующие с блоками гайка-звездочка 8, связанных между собой цепью 9, а одна гайказвездочка 8 кинематически связана с приводом 10 механизма подъема. Нижние части штанг 7, размещенных с каждой боковой- стороны конвейера 6, соединены попарно опорными башмаками 11, которые гибкими связями соединены с грузовыми приводами 12 возврата рамы и на которых установлены управляемые ловители 13, контактирующие с упорами 14 платформ конвейера 6 при блокировании с ним. Расстояние меяоду упорами 14 равно шагу изделий на конвейере. Вильчатые захваты 15 соосные, горизонтально поворотные, установлены на ползунах 16, соединенных с силовыми цилиндрами 17. Ось одног о из захватов 15 кинематически связана с механизмом 18 поворота, установленным рядом на ползуне 16. Изделие 19 устанавливается на конвейере 6 периодического действия с определенным шагом изделий.
Устройство работает следующим образом.
Изделие 19 подается конвейером 6 в зону устройства. Вьщвинуты вперед ловители 13 (фиг. 1), которые захватывают упоры 14, отключается привод конвейера 6. Конвейер 6 движется по инерции до полной остановки совместно с кантователем на величину пути fl , Включаются силовые цилиндры 17, перемещающие ползуны 16 с захватами 15 в сторону изделия 19, и осуществляется захват изделия. Затем включается привод 10 механизма подъема. При этом опорные башмаки 11 опускаются вниз, выбирая зазор (2-3 мм) до отрезка ходового пути 3, опираются на него, после чего осуществляется подъем П-образной рамы 1 вместе с изделием на высоту Н . Включается механизм 18 поворота, осуществляя поворот захватов 15 с изделием 3 19 на требуемый угол для выполнения например, сборочных операций на изде лии. После выполнения технологических операций, срабатывая в обратной последовательности, механизмы устанавливают изделие 19 на те же установочные места на конвейере 6, с которых оно бьто взято. Срабатывают управляемые ловители 13, выходя из контакта с упорами 14 платформ конвейера 6, грузовые приводы 12 возвращают кантователь по отрезку ходового пути 3 до задних упоров А, управляемые ловители 13 выдвигаются вперед в сторону издеЛИЯ 19. Устройство подготовлено для следующего цикла. Устройство работает сойместно с конвейером в автоматическом режиме. Включение приводов последующих движе 8 НИИ осуществляется от конечных выклю чателей предыдущих движений. Начало цикла - включение привода конвейера. Благодаря тому, что предлагаемое устройство с помощью ловителей блокируется с конвейером и перемещается совместно с ним на величину«3, точно повторяется остановка установленного на конвейере изделия относительно оси захватов, не зависящая от изменяющейся при эксплуатации величины пробега конвейера по инерции после отключения его привода. Это снижает износ захватов и повышает надежность его привода. Кроме того, отсутствие вертикального движения захватов относительно рамы снижает число ходов, а именно захват изделия и подъем с кантованием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения и кантования изделий | 1986 |
|
SU1362693A1 |
| Кантователь форм | 1979 |
|
SU814747A1 |
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| Установка для перегрузки штучных грузов | 1989 |
|
SU1775338A1 |
| Конвейерная линия для отделки и транспортировки железобетонных панелей | 1984 |
|
SU1268425A2 |
| Кантователь | 1973 |
|
SU510285A1 |
| Устройство для пакетирования кольцеобразных изделий | 1983 |
|
SU1141052A1 |
| Кантователь | 1976 |
|
SU596350A1 |
| Станок для монтажа секций механизированной крепи и конвейера | 1982 |
|
SU1084455A1 |
| Кантователь для поворота формы с бетонным или железобетонным изделием | 1979 |
|
SU982929A1 |
УСТРОЙСТВО ДЛЯ КАНТОВАНИЯ ИЗДЕЛИЙ НА КОНВЕЙЕРЕ, включающее установленную на основании раму, несущую на горизонтальных поворотных осях приводные захваты, и расположенные с боковых сторон конвейера вертикальные штанги с механизмом -подъема, отличающееся тем, что, с целью повьшения надежности и производительности устройства, рама установлена на основании подвижно посредством смонтированного на последнем вдоль конвейера отрезка ходового.пути, имеющего по концам ограничительные упоры, при этом механизм подъема смонтирован на раме, а нижние концы вертикальных штанг, расположенных с каждой боковой стороны конвейера, связаны между собой«посредством опорного башмака, установленного над отрезком ходового пути с возможностью I взаимодействия с последним причем конвейер имеет упоры, а. башмаки сл выдвижные ловители, установленные с с возможностью взаимодействия с упорами в момент отключения конвейера.
.--Г-ю
17
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кантователь изделий | 1975 |
|
SU631405A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для перегрузки изделий с одного конвейера на другой с одновременным его поворотом на 180 | 1976 |
|
SU581053A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
