Известны автоматические захваты для грузов с захватным штырем и фигурной головкой, содержащие корпус, захватные кулачки, подпружиненный толкатель с конической центрирующей поверхностью и механизм фиксации положения толкателя и кулачков. Однако такие захваты недостаточно надежно удерживают груз.
Цель изобретения - увеличение надежности удержания груза.
Эта цель достигается благодаря тому, что захватные кулачки имеют трапецеидальную форму, щарпирно закреплены одним концом на толкателе, а другим концом с помощью пальцев установлены в фигурных нрорезях корпуса.
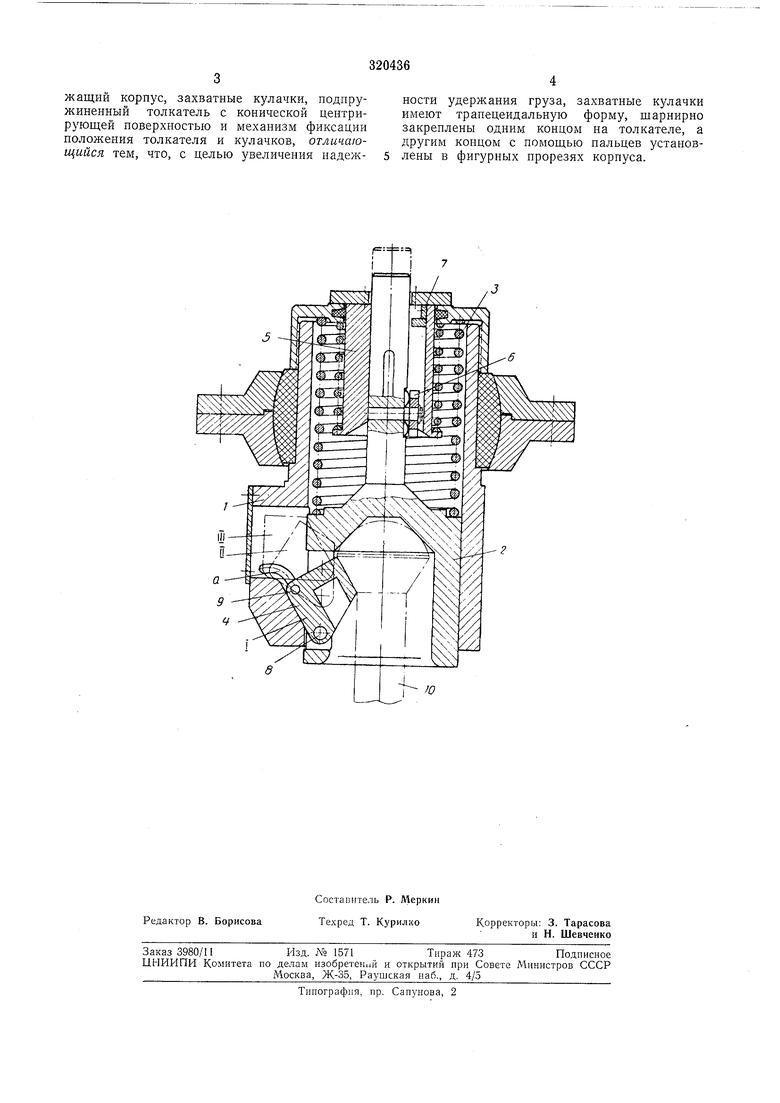
На чертеже схематически изображен описываемый захват.
Захват содержит корпус /, толкатель 2 с пружиной 3, захватные кулачки 4 и механизм фиксации в виде подпружиненной втулки 5 с боковой прорезью (на чертеже не показана), звездочки 6 и упора 7. Захватные кулачки 4 имеют трапецеидальную форму; одним концом они с помощью щарниров 8 закреплены на толкателе 2, а другим с помощью пальцев 9 установлены в фигурных прорезях а корпуса.
толкателя 2 и удерживается от вынадания кулачками 4.
После установки груза в нужном месте толкатель упирается в головку щтыря и останавливается, а корпус с втулкой продолжает опускаться, при этом кулачки поворачиваются относительно шарниров и занимают положение ///, а звездочка от взаимодействия с упором поворачивается на некоторый угол.
Затем корпус и втулка поднимаются. Звездочка входит в прорезь втулки и последняя увлекает за собой толкатель. Во время перемещения корпуса относительно толкателя к лачки занимают положение //, при котором щтырь выходит из толкателя, и груз освобождается.
При последующем опускании захвата на груз толкатель снова упирается в головку щтыря и останавливается, а корпус со втулкой продолжает двигаться вниз до тех пор, пока кулачки не займут полол епие ///, а упор не развернет звездочку и не освободит ее. При дальнейшем подъеме корпуса толкатель остается на месте до тех пор, пока кулачки 4 не займут положение / и не захватят наделено головку щтыря. жащий корпус, захватные кулачки, подпружиненный толкатель с конической центрирующей поверхностью и механизм фиксации положения толкателя и кулачков, отличаю1Ц /1/1 W./IVV.razlyl1 V/ J., l.ti 11. Ji.jvi« J.A«.- jr - щийся тем, что, с целью увеличения надежности удержания груза, захватные кулачки имеют трапецеидальную форму, шарнирно закреплены одним концом на толкателе, а другим концом с помощью пальцев установ i tf лены в фигурных прорезях корпуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватная траверса | 1976 |
|
SU645920A1 |
| Автоматический захват для грузов с захватным штырем и фигурной головкой | 1977 |
|
SU635035A2 |
| Захватное устройство для грузов, снабженных штырем с фигурной головкой | 1973 |
|
SU542709A1 |
| Захватное устройство для грузовСО шТыРяМи C гОлОВКОй | 1979 |
|
SU800096A1 |
| Захватное устройство для грузов с фигурной головкой | 1982 |
|
SU1203005A1 |
| Автоматический захват для грузов с фигурной головкой | 1988 |
|
SU1625808A1 |
| Стыковочный захват | 1975 |
|
SU548541A1 |
| Манипулятор для загрузки конвейера мешковыми грузами | 1985 |
|
SU1316949A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
,
