Известные механизмы подачи гусеничного типа для стволообрабатывающих машин включают две секции, каждая из которых содержит верхнюю и НИЖНЮЮ гусеничные каретки, соединенные между собой лосредством зубчатых секторов.
Механизмы такого рода плохо копируют поверхность ствола, не обеспечивают автоматического центрирования его по оси стволообрабатывающей машины и требуют повышенного усилия для раскрытия гусеничных кареток при захвате ими ствола.
Кроме того, в таких механизмах затруднено регулирование усилия сжатия гусеничных кареток, а также отсутствуют средства автоматического управления механизмом.
В описываемом механизме каждая гусеничная каретка шарнирно подвешена к зубчатому сектору при помош,и одной оси, установленной между звездочками гусеничной цепи каретки. Перед передней по ходу подачи ствола секцией механизма установлен подъемный ролик, смонтированный на одном плече поворотного двуплечего рычага, другое плечо которого соединено при помош;и тяги с зубчатым сектором одной из гусеничных кареток. На каретках по обе стороны от осей подвешивания их к зубчатым секторам расположены упоры . Кроме того, механизм подачи оборудован гидроприводом, содержащим гидроцилиндры прижатия кареток к поверхности обрабатываемого ствола и гидроцилиндр принудительного поворота рычага подъемного ролика, управляемый гидравлическим золотником, взаимодействуюш;им с одним из зубчатых секторов кареток передней секции механизма подачн.
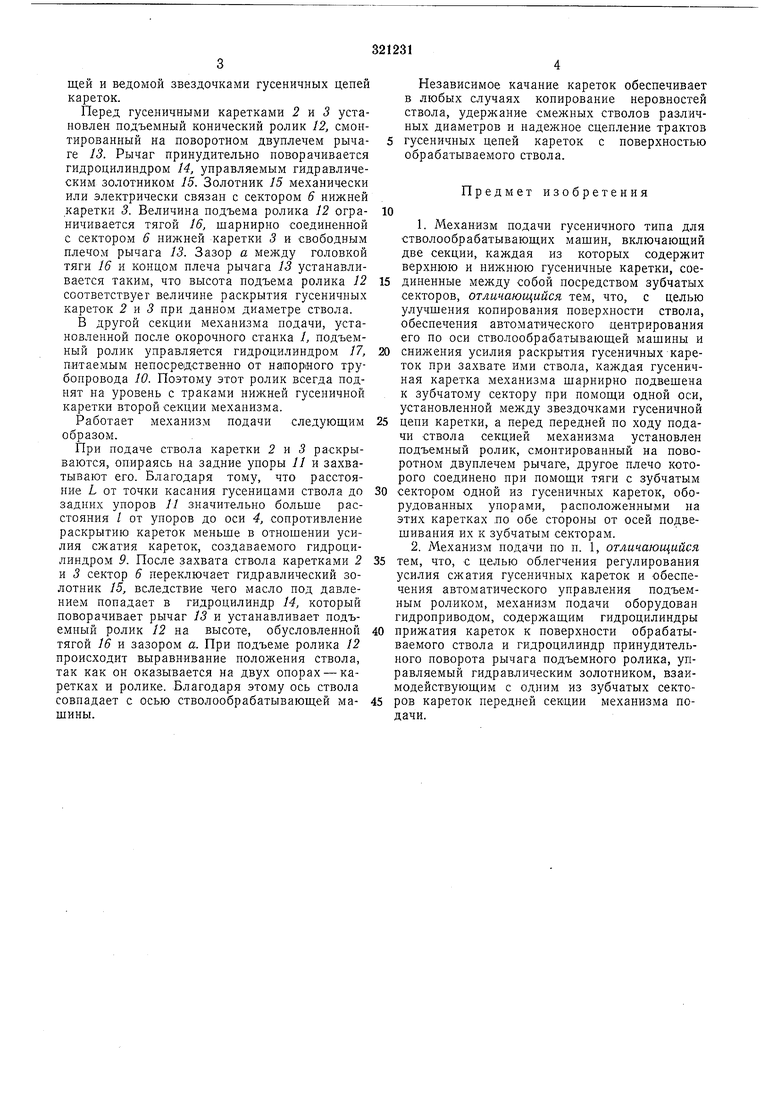
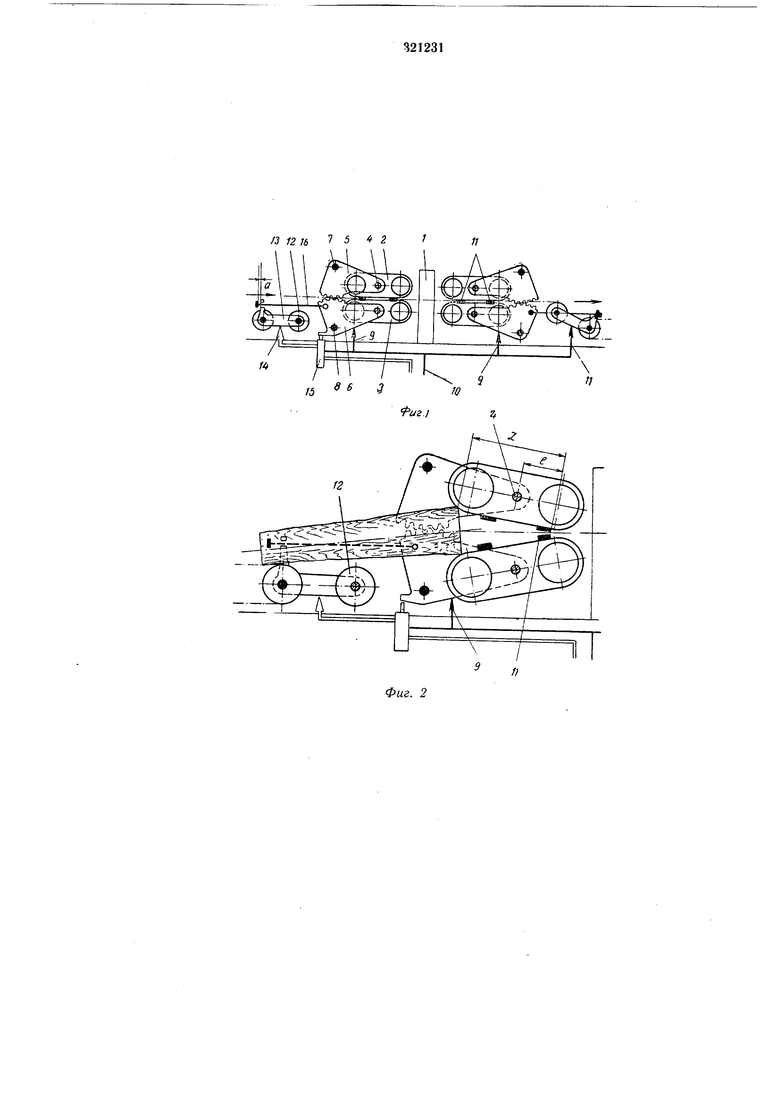
На фиг. 1 изображен описываемый механизм, вид сбоку; на фиг. 2 - передняя секция
механизма в момент начала захвата ствола; на фиг. 3 - то же, с полностью захваченным стволом; на фиг. 4 - описываемый механизм в момент копирования кривизны стволов при удержании одновременно двух смелсных стволов.
Механизм подачи состоит из двух секций, расположенных по обе стороны от стволообрабатываюгцей машины, например окорочного станка 1. Каждая секция механизма содержит
верхнюю 2 и нижнюю 3 гусеничные каретки, шарнирно подвешенные на осях 4 зубчатых секторов 5 и 5. Зубчатые секторы 5 и 6 закрецлены на поворотных валах 7 и 8, вмонтированных в станину (на чертеже не показана). Необходимое усилие сжатия кареток 2 и 5 обеспечивается гидроцилиндрами 9, питаемыми от напорного трубопровода 10 обычной гидросистемы. Смыкание кареток ограничивается упорами 11, расположенными по обе стороны от
щей и ведомой звездочками гусеничных цепей кареток.
Перед гусеничными каретками 2 и 5 установлен подъемный конический ролик 12, смонтированный на поворотиом двуплечем рычаге 13. Рычаг принудительно поворачивается гидроцилиндром 14, управляемым гидравлическим золотником 15. Золотник 15 механически или электрически связан с сектором 6 нижней каретки 5. Величина подъема ролика 12 ограничивается тягой 16, шарнирно соединенной с сектором 6 нижней каретки 3 и свободным плечом рычага 13. Зазор а между головкой тяги 16 и концом плеча рычага 13 устанавливается таким, что высота подъема ролика 12 соответствует величине раскрытия гусеничных кареток 2 и 5 при данном диаметре ствола.
В другой секции механизма подачи, установленной после окорочного станка /, подъемный ролик управляется гидроцилиндром 17, питаемым неоосредствен-но от напорного трубопровода 10. Поэтому этот ролик всегда поднят на уровень с траками нижней гусеничной каретки второй секции механизма.
Работает механизм подачи следующим образом.
При подаче ствола каретки 2 и 5 раскрываются, опираясь на задние упоры 11 и захватывают его. Благодаря тому, что расстояние L от точки касания гусеницами ствола до задних упоров 11 значительно больше расстояния / от уноров до оси 4, сопротивление раскрытию кареток меньше в отношении усилия сжатия кареток, создаваемого гидроцилиндром 9. После захвата ствола каретками 2 и 3 сектор 6 переключает гидравлический золотник 15, вследствие чего масло под давлением попадает в гидроцилиндр 14, который поворачивает рычаг 13 и устанавливает подъемный ролик 12 на высоте, обусловленной тягой 16 и зазором а. При подъеме ролика 12 происходит выравнивание положения ствола, так как он оказывается на двух опорах - каретках и ролике. Благодаря этому ось ствола совпадает с осью стволообрабатывающей машины.
Независимое качание кареток обеспечивает в любых случаях копирование неровностей ствола, удержание смежных стволов различных диаметров и надежное сцепление трактов гусеничных цепей кареток с поверхностью обрабатываемого ствола.
Предмет изобретения
1. Механизм подачи гусеничного типа для стволообрабатывающих машин, включающий две секции, каждая из которых содержит верхнюю и нижнюю гусеничные каретки, сое15 диненные между собой посредством зубчатых секторов, отличающийся тем, что, с целью улучшения копирования поверхности ствола, обеспечения автоматического центрирования его по оси стволообрабатываюшей машины и 20 снижения усилия раскрытия гусеничных кареток при захвате ими ствола, каждая гусеничная каретка механизма шарнирно подвешена к зубчатому сектору при помощи одной оси, установленной между звездочками гусеничной 5 цепи каретки, а перед передней по ходу подачи ствола секцией механизма установлен подъемный ролик, смонтированный на поворотном двуплечем рычаге, другое плечо которого соединено при помощи тяги с зубчатым 0 сектором одной из гусеничных кареток, оборудованных упорами, расположенными на этих каретках ,по обе стороны от осей подвешивания их к зубчатым секторам.
2. Механизм подачи по п. 1, отличающийся 5 тем, что, с целью облегчения регулирования усилия сжатия гусеничных кареток и обеспечения автоматического управления подъемным роликом, механизм подачи оборудован гидроприводом, содержащим гидроцилиндры 0 прижатия кареток к поверхности обрабатываемого ствола и гидроцилиндр принудительного поворота рычага подъемного ролика, управляемый гидравлическим золотником, взаимодействующим с одним из зубчатых секто5 ров кареток передней секции механизма подачи.
12
Фиг. 2
/-
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подачи стволообрабатывающего станка | 1983 |
|
SU1135645A1 |
| Подающее устройство к стволообрабатывающим машинам | 1978 |
|
SU753635A1 |
| МЕХАНИЗМ ПОДАЧИ ГУСЕНИЧНОГО ТИПА ДЛЯ СТВОЛООБРАБАТЫВАЮЩИХ МАШИН | 1966 |
|
SU184052A1 |
| Гусеничный движитель сельскохозяйственного трактора | 1981 |
|
SU958201A1 |
| Устройство для подачи бревен в стволообрабатывающий станок | 1978 |
|
SU899339A1 |
| Устройство для загрузки подвесок подвесного конвейера | 1987 |
|
SU1507695A1 |
| Подающе-центрирующее устройство стволообрабатывающего станка | 1986 |
|
SU1445965A1 |
| Каретка кривовязюка к устройству дляВыРубКи зАгОТОВОК из пОлОСОВОгОМАТЕРиАлА | 1979 |
|
SU841732A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU929284A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
12
3 игА
