Изобретение относится к области изготойления накладных знаков циферблатов часов.
Известен автомат для изготовления накладных знаков циферблатов часов, содержащий Станину, головки с резцами для обработки поверхности вырубленных по контуру и запрессованных в ленту знаков, механизм фиксации ленты с предварительно вырубленными в Hefi базовыми отверстиями но штифтам-ловителям, механизм шаговой подачи ленты, механизм выталиквания знаков из ленты и кулачковый привод управления механизмами.
Заготовкой служит металлическая лента, в которой транспортируются и нодвергаются механической обработке вырубленные в ленте но контуру и запрессованные в нее знаки. В ленте вынолиены технологические отверстия для точной фиксации каждого знака относительно инструмента на рабочих позициях.
В известном автомате штифты-ловители выполнены нодвижными, что требует большой точности изготовления и монталса сопряженных деталей конструкции. Управление подачей головок с резцами, прижимами ленты п штифтами-ловителями осуществляется двумя кулачками. Автомат не позволяет установить каждую головку для огранки знаков вдоль и поперек ленты, что ограничивает его технологические возможности. Кроме этого, он не предусматривает изготовления штифтов-иол ек
из Фела знака, необходимых в ряде случаев для крепления знаков на циферблате.
Цель изобретения - новышенне точности и расширение технологических возможностей
автомата.
Поставленная цель достигается тем, что он снабжен механизмом обработки ножек знаков с ограничителем поворота механизма вынолненного в виде шпинделя, размещенного в
пиноли с установленным на ее верхнем ко1ще стружкосборником, соединенной пружиной с нодвижным корпусом, расположенным на перпендикулярной плоскости ленты осн, закренленной в 1 еподвижном корпусе, который прнжат к станине базовой платой в заданном положении и на котором поставлено охватывающее кольцо с кольцевым назом под переставляемый нрн наладке сухарь, сцентрированное относительно среднего положения шпинделя и
взанмодействующее с подвижным корпусом посредством закрепленного на кольце упора. Механизм фиксации ленты выполнен в виде закрепленных на станине на каждой рабочей позиции базовых плат с неподвижными штифтами-ловителямп и шарнирно закрепленных на горнзонтальной осн подпружиненных поворотных плит с концентричными Т-образнымя пазами, в которых укреплены с возможностью разворота головки с резцами, нодпружиненгов управления, каждый из которых одним нлечом связан с кулачковым приводом, другим - с упором, ввернутым в соответствующую поворотную плиту, а в средней его части изолированно закреплен контакт, вазимодействующий с ввернутым в нодпружинеиный рычаг упором, нри этом каждый подпружиненный рычаг снабжен дополнительным упором, взаимодействующим с микропереключателем.
Кроме того, стружкосборник представляет из себя свободно надетый на пиноль диск, на верхней стороне которого расположено кольцо с закрепленным на нем скребком и с окном против скребка, а на нижней стороне предусмотрен зубчатый венец, взаимодействующий с установленными на неподвижном корпусе храповыми собачками, нри этом иоворот кольца ограничен щтифтом. Ограничитель поворота механизма обработки ножек выполнен в виде ноднружнненного вдоль оси пальца с конической поверхностью на части его длины, взаимодействующей с противоноложно расположенными в неподвижном корпусе упорами, н помещен в отверстие поворотного корпуса параллельно оси щпинделя с возможностью регулирования в осевом нанравлении расположенным на его конце лимбом.
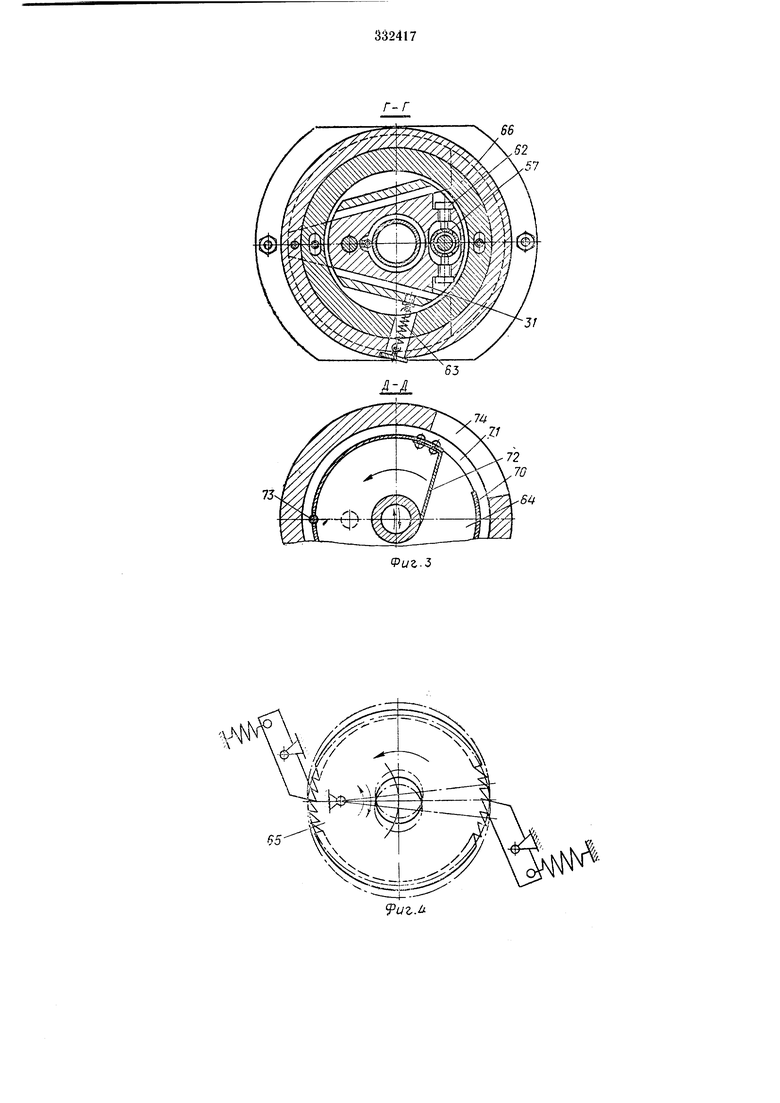
На фиг. 1 изображен предлагаемый автомат, вид в ллане с разрезами но Л-А и Б-Б; на фиг. 2 - разрез но В-В головки для обработки щтифтов-ножек знака; на фиг. 3 - разрезы по Г-Г и Д-Д на фиг. 2; нафпг. 4- схема поворота диска стружкосборника.
Многопозиционный автомат содержит станину / с каретками 2 для щаговой Бодачи ленты 3.
На каждой нозиции автомата на станине закреплены базовые нлаты 4 с неподвижными штифтами-ловителями 5. При обработке лента нижней нлоскостью оннрается на верхнюю плоскость базовых нлат 4 и фиксируется щтифтами-ловнтелями 5 по технологнческим отверстиям. В станине, в плоскости прилегания ленты к базовым платам, закреплепа ось
6,на которой установлены новоротные плиты
7,рычаги 8 с направляющими 9 ленты, установленные нротнв каждой позиции, и рычаги управления 10.
В каждый рычаг 8 ввернуты уноры 11 н 12, а рычаги управлення 10 сиаблсеиы электрически изолированным от массы упором-контактом 13, взаимодействующим с упором 11. Упор 12 взаимодействует с установленным на станине микропереключателем 14. Рычаг управления 10 одним плечом опирается на кулачок 15, а на его другое нлечо оннрается регулируемый упор 16, ввернутый в поворотную нлиту 7. Пружины 17 и 18 обеспечивают взаимодействие упоров 11, 12 Е 16 с рычагом управления 10 и микропереключателем 14. На поворотных плитах 7 установлены над лентой и.нструментальные головки 19 с резцами 20 и приводом их вращения 21. Головки предназначены для огранки виднмых граней знаков 22
и могут быть развернуты на нлнтах по Т-образным пазам 23 и смещены в боковом направлении на салазках 24. Шпиндели 25 головок имеют регулировку в осевом направлении. 5 На первой позиции автомата, под лентой, установлена на станине резцовая головка 26, нредназначепная для последовательной обработки штифтов-ножек 27 нз тела знака 22 и одновременно его основания 28. 10 На последней позиции, иод лентой, установлен выталкиватель 29 готовых знаков из ленты. Базовые платы на позициях огранки знаков сиабл ены подзодимыми опорами 30.
Резцовая головка 26 смонтирована на не15 подвпжном корпусе 31, закрепленном на станине болтами 32, входящими в Т-образный круговой наз 33 и нрнжнмающнмн корпус 31, воздействуя на базовую нлату 4. В корпусе 31 винтом 34 закреплена перпендикулярно нло20 скости ленты ось 35, на которой имеет возможность поворачиваться подвижный корнус 36 с пиполью 37 и щпинделем 38, закрепленным параллельно оси 35 в пиноли гайкой 39. Шпонки 40 и 41 предохраняют от разворота 25 вокруг своей осн шпиндель и пиноль. Шпиндель оснащен электродвигателем 42 и совместно с нинолью может перемещаться вдоль осн в направлении к ленте под действием пружины 43, СБязывающей пиноль 37 и подвиж20 ный корнус 36, а от ленты - рычагом 44, управляемым кулачком. Рычаг 44 взаимодействует с фланцем 45, закрепленным па пиполи винтом 46 и снабженным упором 47, установленным под осью 35.
5 Крайнее верхнее положение пиноли ограничивает упор 47, который опирается на стакан 48, закрепленный на корпусе 31 винтами 49. На стакан свободно надето кольцо 50 с Т-образным круговым пазом 51 и упором 52, 0 который входит в паз подвижного корпуса 36. На кольце закреплен болтом 53 сухарь 54, взаимодействующий с рычагом 55, управляемым кулачком. Ограничитель поворота корпуса включает запрессованную в подвнжный 5 корпус 36 втулку 56 с окнами 57, в которой может неремещаться параллельно оси шпинделя под действием лимба 58 и нрунсины 55 палец 60 с конической поверхностью 61. В неподвижный корпус 31, против окон 57 н кони0 ческой поверхности 61, установлены уноры 62. Пружина 63, воздействуя на подвижный корпус 36, обеспечивает взаимодействие его с упором 52 и сухаря 54 с рычагом 55, а кроме этого, контакт конической новерхности 61 с 5 унором 62. На нижний конец ниноли навернут лимб, а на верхнем конце установлен стружкосборник для автоматического удаления стружки, выполненный следующим образом.
1а ннноль свободно надет диск 64 с зубча0 тым венцом 65. Диск опирается на кольцо 66. привернутое к корнусу 31 винтами 67. На кольце 66 диаметрально противоположно установлены на осях храловые собачки 68, взаимодействующие с зубчатым венцом 65 под действием пружин 69.
На диске 64 сцентрировано кольцо 70 с окном 71 и скребком 72, один конец которого опирается на пиноль, а другой прикреплен к кольцу 70. Диск 64 с кольцом 70 имеет возможность перемещаться между верхней поверхностью кольца 66 и поверхностью базовой платы 4, при этом разворот кольца 70 вокруг пнноли ограничен штифтом 73. В базовой плате 4, против окна 71, выполнено окно 74, предназначенное для выхода стружки.
Устройство работает следующим образом.
Лента 3 вручную заправляется в каретки 2 и направляющие 9. В это время направляющне подняты вверх так, что веошины щтибтов-ловителей 5 находятся под нижней плоскостью ленты и не мешают ее транспортировке. Включают электродвигатель кулачкового вала, и весь цикл обработки осуществляется автоматически.
Под действием ппужин 17 опускаются рычаги 10, а под действием ппужины 18 - рычаги 8 с напоавляющими 9 и лентой 3 и ocvnieствляют посадку ленты на щтигЪты-ловители 5 и прижим ее к бячовой плате 4. Ппи опускании рычага 8 возникает непперывный механический и электрический контакт упопа // с упором-контактом 13. Пои непопадании ленты базовыми отверстиями на пттифты-ловителн 5 рычаг 8 останавливается, а пычяг 10 движется и рялрьтвает электрический контакт // и 13, тем самым выключив электродвигатель кулачкового вала и остановив пабот всех механизмов. Ппи попадании ленты на щтифты-ловители упоп 12 воздействует на микпопереключатель 14. дублио -ет электпический контакт упоров // и 13. что по- воляет пычагу 10 ппололжить движение виттт ппи пазомкиутом онтакте УПОРОВ // и 13. Поворотная плита 7 с головками 19 следует за пычагом 10, и резп,ьт 20 обпябятывают вепхнте грани знаков 22. Глубина обработки регулиpvpTCH упором 16.
При подъеме пычагов 10 поднимаются поворотные плиты 7, пезцы 20 отходят от ленты, а упопы-кснтакты 13, воздействуя па упопьт 11, поднимают рычаги 8 с наппавляющимн 9. которые снимают ленту со штифтов-ловнтелей 5, сразу на всех позициях. Каоетки 2 поодвигают ленту на таг, и такт новторяется.
Резцовая головка 26 работает следующим образом. В исходном положении под действием пружипы 63 КОРПУС 36 повернут в крайнее положение, соппикясаясь конической поверхностью 61 пяльп.а 60 с упором 62. Ппи подъеме пычага 44 под действием пружины 43 пиноль 37 со щпинделем 35 перемещается в осевом направлении, и воащающийся резец 75 обтачивает одну пттигЬт-ножку 27 и часть основания 28 знака 22. Перемещение пинолизаканчивается при соприкосновении упопа 47 со стаканом 48, ппи этом между пычагом 44 и фланпем 45 образуется зазор. После это-г. рычаг 44 опускается вниз и отводит пезец 75 под нижнюю плоскостт, ленты. Рычаг 55, во- действуя на сухарь 54, поворачивает кольцо
50, а его упор 52, нажимая на поворотный корпус 36, поворачивает его вокруг оси 35 до соприкосновения пальца 60 с другим упором 62. Рычаг 55 снабжен пружинным компенсатором, предназначенным для компенсации запаса хода кулачка, который управляет поворотом. Рычаг 44 вновь ноднимается, и резец 75 обтачивает вторую штифт-ножку 27 и заканчивает обпаботку основания 25 знака 22.
Рычаг 44 отводит пиноль со шпинделем вниз, а рычаг 55 поворачивает коппус 36 в исходное положение. Величину поворота коппуса 36, котооая определяет расстояние между пттиАтами-ножками 27. можно пегулипо вать, перемешая лимбом 58 пален 60 и тем изменяя зазоп мeждv комической поверхностью 61 и упопами 62. Погпетнность расстояния между штифтами-ножкями, возникающая в пезультате пепемещения ппи
Ло
повопоте Konnvca по дуге, а не по ппямои, рассчитывается и коппектируется в зависимости от положения -нака в ленте ппи его вырубке. Высота щтифтов-ножек пегулипуется ротом лимба на пиноли 37. ппи этом винт 46 иозволяет пиноли 37 пепемещаться во фланцр 45.
Ппи обточке титиЛтов-ножек стпужка под действием собственного веся падает ня ВРПХ пюю плоскость дискя 64. Ппи повопотах коппуса 36 с пинолью 37 вокпуг осп 35 п ппи взаимодействтттт с хпяповымч обпчкями 68 ппепывисто впящается д одном пяппял-к чии
ВОКПУГ пииоли. Скпебок 72 с кольнем 70 те S
впатнается вотпуг пиполи и ппппдтгтпуот В1ящрпию СТПУЖК1Т на дтске 64. Стпуж п. гкол-зя по скпебку, улаляется чепез окна 7/ и 74. Ппи изменении положения знаков ч т-пловку 26 можно пазвепнуть в .. окпуг спетпего положения оси птптппетя 3f. ппи чтом необходимо тплько изменить полпж нис с Хяпя 54 в пазу 5/.
В данном устпойствс MorvT быть ппчмепеп -. в зав1 симостп от необходимости и больигр количество резцовых головок, показано на фиг. .
Предмет изобретения
1. Автомат для изготовления накладных знаков циферблатов часов, содержащий станину, головки с резцами для обработки поверхности вырубленных по контуру и запрессованных в ленту знаков, механизм фиксации
5 ленты с предварительно вырубленными в ней базовыми отверстиями по щтифтам-ловнтелям, механизм шаговой подачи ленты, механизм выталкивания знаков из ленты и кулачковый привод управления механизмамп, отличающийся тем, что, с целью повыщения точности и пасшипения технологических возможностей автомата, он снабл еп механизмом обработки но}кек знаков с ограничителем поворота механизма, выполненного в виде 7 ленным на ее верхнем конце стружкосборинком, соединенной пружиной с подвижным корпусом, расположенным па перпендикулярной плоскости ленты оси, закрепленной в неподвижном корпусе, который прижат к стани-5 не базовой платой в заданном положении и на котором поставлено охватывающее кольцо с кольцевым пазом под переставляемый при наладке сухарь, сцентрнрованное относительно среднего положения щпинделя и взаимо-Ю действующее с подвижным корнусом посредством закрепленного на кольце упора, а механизм фиксации ленты выполнен в виде закрепленных на станине на каждой рабочей позиции базовых плат с неподвижными щтифтами-15 ловителями и щарнирно закрепленных на горизонтальной оси подпружиненных поворотных плит с концентричными Т-образными пазами, в которых укреплены с возможностью разворота головки с резцами, подпружинен- 0 ных рычагов с направляющими ленты и рычагов управления, каждый из которых одним плечом связан с кулачковым приводом, другим - с улором, ввернутым в соответствующую поворотную плиту, а в средней его части25 8 изолированно закреплен контакт, вза 1модействующий с ввернутым в подпружиненный рычаг упором, при этом каждый подпружиненный рычаг снабжен дополнительным упором, взаимодействующим с микропереключателем, 2. Автомат по п. 1, отличающийся тем, что ограничитель поворота механизма обработки ножек выполнен в виде подпружннепного вдоль оси пальца с конической поверхностью на части его длины, взаимодействующей с противоположно расположенными в нсподвнжном корпусе упорами, и помещен в отверстие поворотного корпуса параллельно оси шпинделя с возможностью регулирования в осевом направлении расположенным на его конце лимбом. 3. Автомат по п. 1, отличающийся тем, что стружкосборник выполнен в виде свободно надетого на пиноль диска, на верхней стороне которого расположено кольцо с закрепленным на нем скребком и с окном против скребка, а на нижней стороне выполнен зубчатый венец, взаимодействующий с установленными на неподвижном корпусе храповыми собачками, при этом поворот кольца ограничен щтифтом.
ТА V г S 269
29


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ В ЛЕНТЕ | 1970 |
|
SU259036A1 |
| Устройство для обработки деталей в ленте | 1973 |
|
SU484491A1 |
| АВТОМАТ ДЛЯ ИЗМЕРЕНИЯ И СОРТИРОВКИ ДЕТАЛЕЙ | 1938 |
|
SU57760A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
| АВТОМАТ НАВИВКИ И ФОРМОВКИ СПИРАЛЕЙ КВАРЦЕВЫХ ЙОДНЫХ МАЛОГАБАРИТНЫХ ЛАМП | 1973 |
|
SU376832A1 |
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU536871A1 |
| МНОГОПОЗИЦИОННЫЙ СТАНОКI ВСЕСОЮЗНАЯ \ | 1973 |
|
SU381499A1 |
| Устройство для запрессовки деталей типа штифтов | 1985 |
|
SU1288013A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Установка для безударной клепки стержневых заклепок | 1980 |
|
SU941003A1 |


19 20
Фиг..
J5 75 37
66
62
57
Фб/г.з
