Известен способ автоматического регулирования давления прессования асбоцементных трубоформовочных машин путем преобразования сигнала, соответствующего толщине стенки формуемой трубы, в сигнал, изменяющий давление ирессования в соответствии с заданной зависимостью изменения давления прессования от толщины стенки.
(Недостатком такого способа является невысокая точность и нестабильность регулирования давления прессования.
В иредлагаемом способе эти недостатки устранены за счет того, что алгебраически суммируют иреобразованный сигнал с сигналом, соответствующим давлению прессования, и суммарный сигнал используют для регулирования давления прессования.
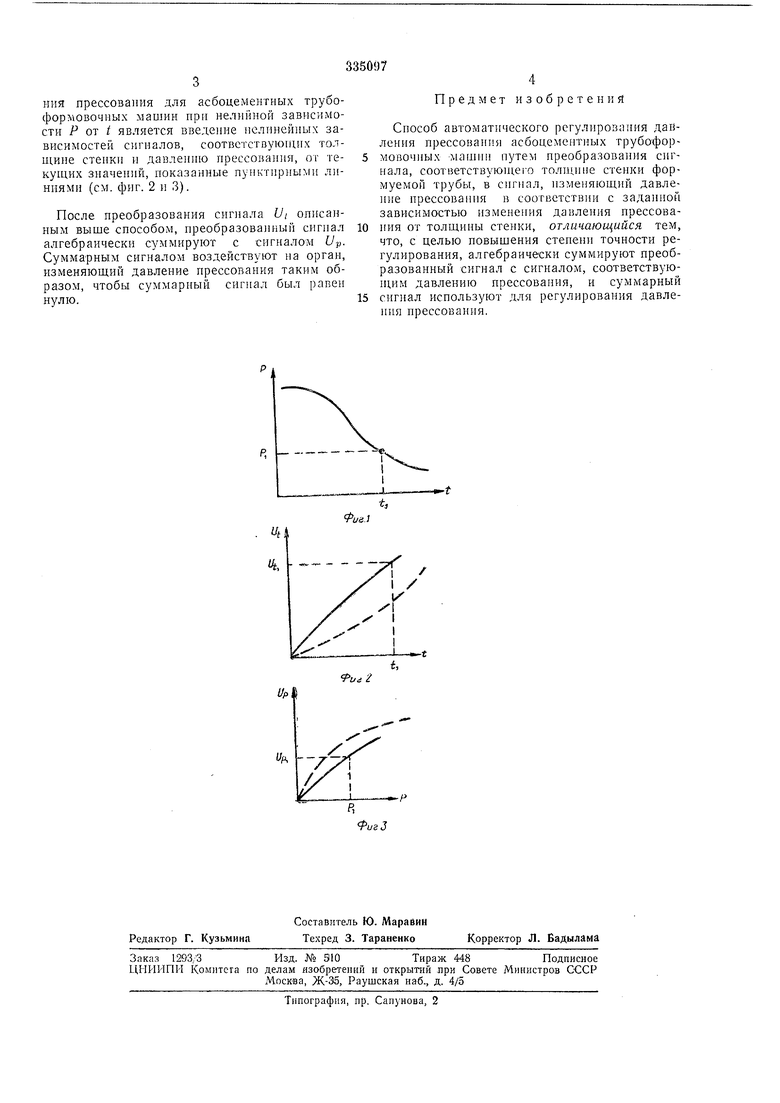
На фиг. 1 графически показана заданная зависимость давления прессования от толщины стенки формуемой трубы; па фиг. 2 - зависимость сигнала, соответствующего толщиие стенки, от ее текущего значения; на фиг.З- зависимость сигнала, соответствующего давлению прессования, от его текущего значения.
Задают конкретную зависимость изменения давления прессования Р от толщины стенки формуемой трубы /. Эта зависимость определяется технологией изготовления асбоцементных труб и может быть как линейной, так и не линейной. Каждому текущему значению /
и Р соответствует электрический сигнал {У/ 1 Up. Для каждого текущего значения толщины стенки, например, для /ь сигнал соответствующий этому значению U/, нреобразуют таким образом, чтобы его значение стало равно Up. Последнее выполняют для всех точек заданной зависимости давления прессования от толщины стенки формуемой трубы.
При лииейной зависимости Р от i указанное преобразование также будет линейным и сведется к электрическому умножению Ut на постоянный коэффицнеит и алгебраичеС ому сложению с постоянным сигиалом. Значение ностоянного коэффициента и ностоянного сигнала определяют но линейно запнс мост) Р от / и зав снмостям Ul от i и Up от р.
нз возмож 1ых путс рсализаци
предлагаемого способа регулировашш давления нрессования при нелинейиой завис 1мостн Р от t является апроксимация этой завис 1мости графиками л нейных зав 1симостей. Реалпзацня каждой из последи х зависимостей
осуществляется как оинса ю , а нереход с одного участка заинсимости на следу ощпй определяют по заданной нелинейной зависимости Р от t. Другим возможным путем реалнзац и спония прессования для асбоцементных трубоформовочных MauJHH нри нелийной зависимости Р от t является введение нелинейных зависимостей сигналов, соответствующих толщине стеикн и давлен1но ирессова П1Я, от текущих значений, показанные пунктирными л ниями (см. фиг. 2 и 3).
После преобразования сигнала Ut описанным выще способом, преобразованный сигнал алгебраически суммируют с сигналом Up. Суммарным сигналом воздействуют на орган, изменяющий давление прессования таким образом, чтобы суммарный сигнал был равен нулю.
Предмет изобретений
Способ автоматического регулирования давления прессования асбоцемеитных трубоформовочных машин путем нреобразования сигнала, соответствующе|-о толщине стеики формуемой трубы, в сигнал, нзменяющнй давление прессования в соответствии с заданной зависимостью изменеиия давления прессования от толщины стенки, отличающийся тем, что, с целью повыщения стеиенн точности регулирования, алгебраически суммируют преобразованный сигнал с сигналом, соответствуюпшм давлению прессования, и суммарный
сигнал используют для регулирования давления ирессовання.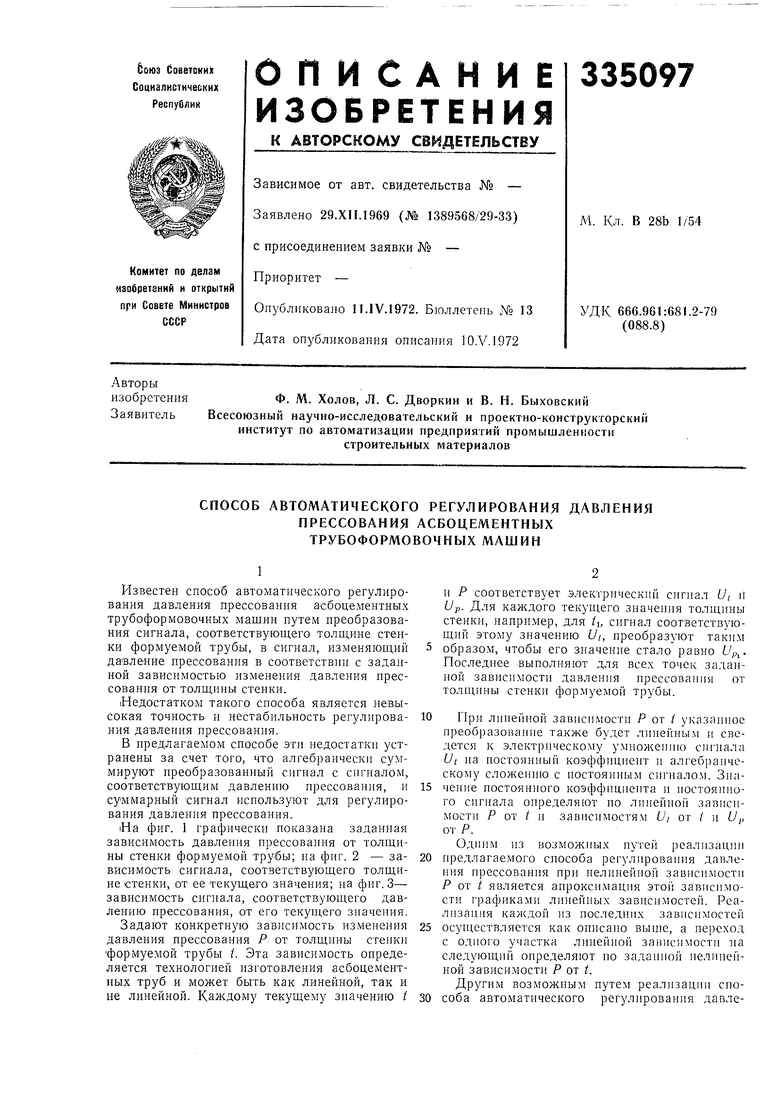
Фиа.1
fft --7
