Изобретение относится к грузоподъемным устройствам, а именно, к механизмам выдвижения телескопических стрел.
Известны механизмы выдвижения, преимуа1,ественно для телескопических стрел, содержащие раздвижную раму типа «нюрнбергских ножниц со следящей системой.
Целью настоящего изобретения является обеспечение передачи сигнала управления к рабочему органу без искажения.
Эта цель достигается тем, что раздвижная рама снабжена блоками, которые огибает уцравляюп ий трос неизменной длины, причем один конец троса закреплен на блоке еледящей системы, а другой его конец связан с рычагом управления.
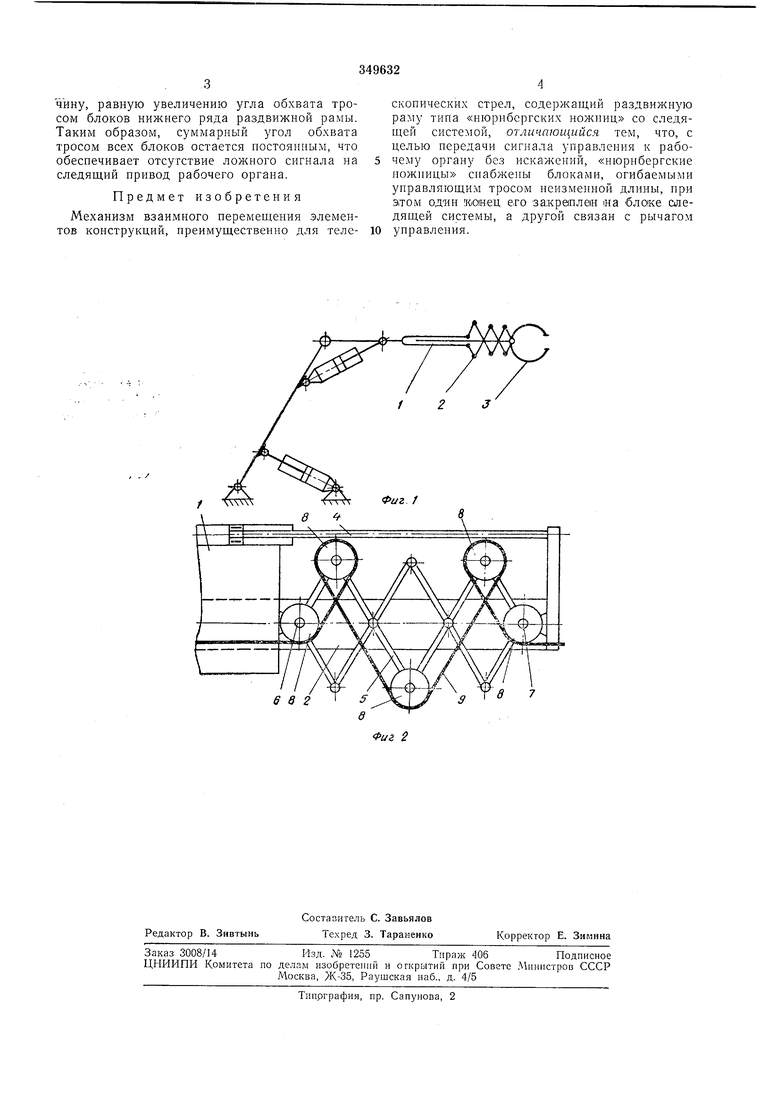
На фиг. 1 изображен общий вид устройства; иа фиг. 2 - телескопическая стрела с раздвижной рамой типа «нюрнбергских ножниц.
Механизм выдвижения состоит из щарнирно сочлененной стрелы с наружной секцией /, внутренняя секция 2 которой щарнирно соединена с захватом 3, снабженным следящим гидравлически.м приводом (на чертеже не показан).
Телееконическая стрела снабжена силовым цилиндром 4, закрепленным на ее наружной секции /, и раздвижной рамой 5, щариир 6 которой закреплен на ее наружной секции /, а щарнир 7-на внутренней секции 2. На
раздвижной раме 5 уста ювлены блоки 8 равного диаметра, огибаемые управляющим тросом 9 следящего привода захвата механизма выдвижения. Нри этом трос 9 огибает упомянутые блоки в одном направлении, напрнмер против часовой стрелки.
При работе силового цилиндра 4 внутренняя секция 2 телеекопичеекой стрелы перемещается относительно наружной секции J.
В частности, при выдвижении телеекопичеекой стрелы щарнир 7 удаляетея от щарнира (7, что нриводит к вытягиванию раздвижной рамы 5, при этом блоки 8 не вращаются во круг своих осей. Намотка на блоки 8 управляющего троса 9 в одном направлении обеспечивает параллельность троса последовательно соединенным звеньям раздвижной рамы 5. Таким образом, во время работы телескоиической стрелы длииа управляющего троса 9
между щарнирами 6 и 7 остается неизменной, что обеспечивает передачу на следящий привод рабочего органа неискаженного сигнала. При вытягивании раздвижной рамы 5 угол обхвата тросом (при его намотке, например, против часовой стрелки) блоков ее верхнего ряда увеличивается на величину, равную уменьщенпю угла обхвата тросом блоков нижнего ряда раздвижной рамы. При складывании послед)1ей угол обхвата тросом
чину, равную увеличению угла обхвата тросом блоков нижнего ряда раздвижной рамы. Таким образом, суммарный угол обхвата тросом всех блоков остается постоянным, что обеспечивает отсутствие ложного сигнала на следящпй привод рабочего органа.
Предмет изобретения
Механизм взаимного перемещения элементов конструкций, преимущественно для телескопических стрел, содержащий раздвижную раму типа «нюрнбергских ножниц со следящей системой, отличающийся тем, что, с целью передачи сигнала управления к рабочему органу без искажений, «нюрнбергские ножницы снабжены блоками, огибаемыми управляющим тросом неизменной длины, при э;том один конец его закреплен на блоке следящей системы, а другой связан с рычагом
управления.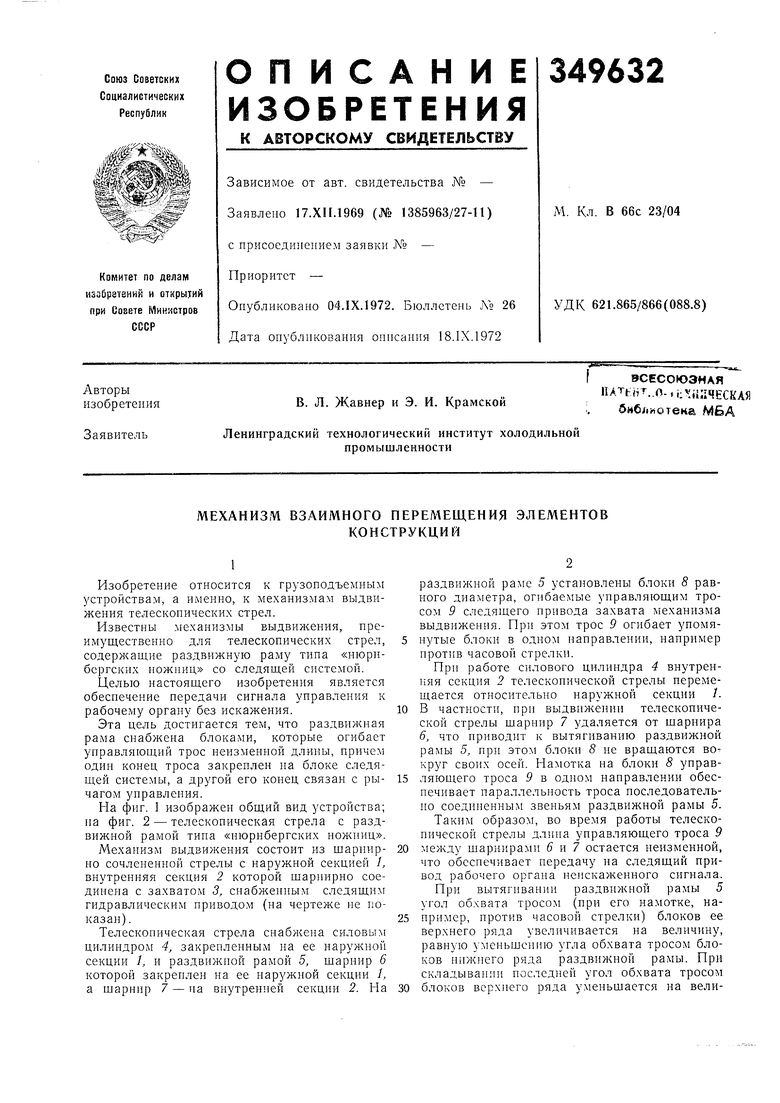
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕСКОПИЧЕСКАЯ СТРЕЛА ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 1972 |
|
SU347292A1 |
| МАНИПУЛЯТОРВСЕСОЮЗНАЯnATEb'TbO-TEXHiriЗНАЯ IHiri^:KAfffБНБЛ:^О>&:?ИА | 1971 |
|
SU318537A1 |
| Телескопический ленточный конвейер | 1988 |
|
SU1680596A1 |
| УССР IIБЛЙЛИОТЕКД | 1966 |
|
SU185476A1 |
| МАНИПУЛЯТОР ДЛЯ МОНТАЖНЫХ И ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТB^lBJU'^l.-' | 1973 |
|
SU377229A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ ГРУЗОВ | 1969 |
|
SU251456A1 |
| Перегружатель штучных грузов из крытых вагонов | 1969 |
|
SU441222A1 |
| Устройство для обработки поверхности судов | 1977 |
|
SU897634A1 |
| Машина для разгрузки сыпучих материалов из крытых железнодорожных вагонов | 1958 |
|
SU116232A1 |
| Телескопическая стрела манипулятора | 1976 |
|
SU555007A1 |
682
8 7
