Изобретение относится к системам для автоматизации уиравления мобильными сельскохозяйственными агрегатами при производстве ими земледельческих работ.
По основному авт. св. № 276566 известна система аналогичного назначения, в которой с целью группового автоматического вождения агрегатов на борту каждого из них смонтирован токонесущий провод, являющийся ориентиром для ведомого агрегата, и дифференцнальный индукционный датчик, воспринимающий от провода электромагнитные сигналы ориентации.
Автоматическое вождение ведущего агрегата производится с ориентацией по стациопарным базовым линиям - токонесущим проводам, проложенным на поле.
Предложенная система с целью автоматического поддержания постоянства дистанции между движущимися один за другим агрегатами снабжена дополнительными индукционными антеннами и дифференциальными датчиками, реагирующими на изменение их взаимного положения, вызванное изменением дистанции между агрегатами, и выдающими командный сигнал на изменение скорости ведомого или ведущего агрегатов.
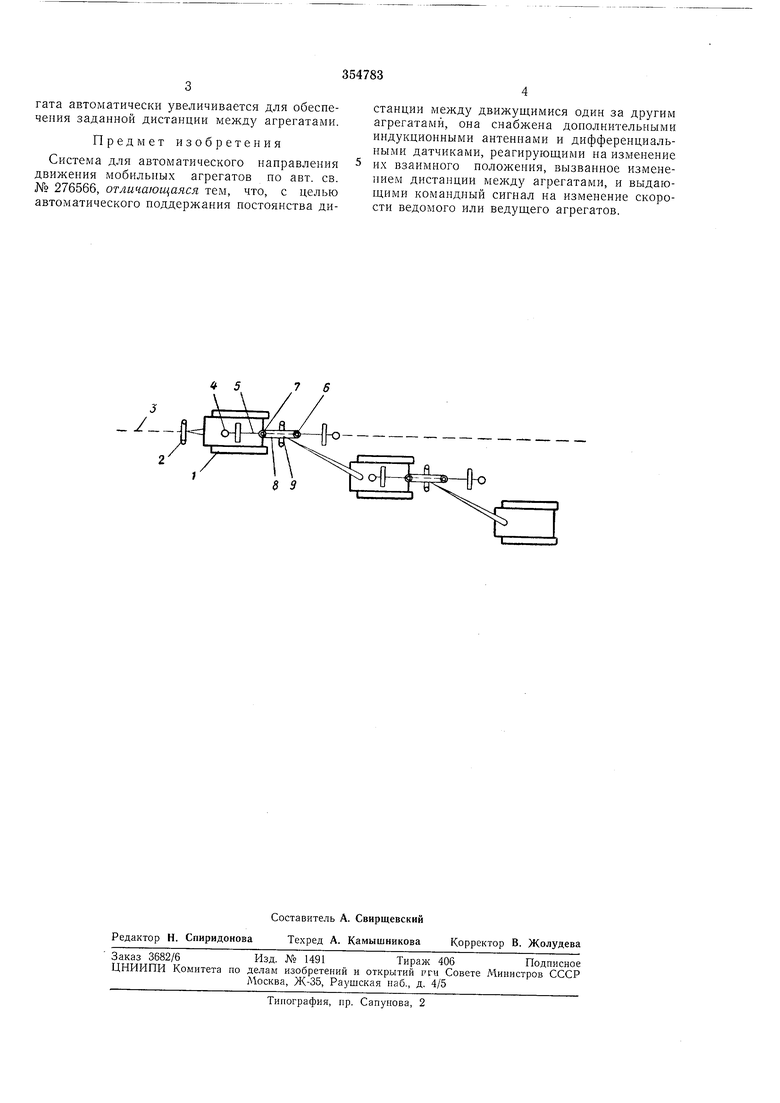
На ведущем агрегате 1 смонтирован индукционный датчик 2, сигналом ориентации для которого служит электромагнитное поле, создаваемое токонесущим проводом 8, проложенным на поле. На агрегате на опорах 4 смонтирован токонесущий провод 6, служащий ориентиром для последующих ведомых агрегатов с датчиками и токонесущими проводами.
Индукционные стержневые антенны 6 смонтированы на концах токонесущего провода 5, дополнительные дифференциальные датчики 7 установлены на траверсе 8, закрепленной па кронщтейне 9.
Когда датчики 7 располагаются над проводом симметрично по Отнощению к антенне, то в катущках датчиков наводятся равные сигналы и разностный сигнал отсутствует. Когда датчики смещаются и располагаются несимметрично относительно антенн, а, следовательно, и провода, то в датчиках поЯВляется разностный сигнал (сигнал рассогласования), при этом в зависимости от знака отклонения изменяются и фазы разностного напряжения.
Сигнал рассогласования от датчиков передается через находящийся на агрегате усилитель исполнительному механизму агрегата, регулирующему скорость его движения.
гата автоматически увеличивается для обеспечения заданной дистанции между агрегатами.
Предмет изобретения
Система для автоматического направления движения мобильных агрегатов по авт. св. № 276566, отличающаяся тем, что, с целью автоматического поддержания постоянства дистанции между движущимися один за другим агрегатами, она снабжена дополнительными индукционными антеннами и дифференциальными датчиками, реагирующими на изменение их взаимного положения, вызванное изменением дистанции между агрегатами, и выдающими командный сигнал на изменение скорости ведомого или ведущего агрегатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОБИЛЬНЫХ АГРЕГАТОВ | 1972 |
|
SU345889A1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОБИЛЬНЫХ АГРЕГАТОВ | 1970 |
|
SU276566A1 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| Электроиндукционная система местоопределения самоходных машин | 2024 |
|
RU2831279C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 1972 |
|
SU352619A1 |
| Индукционное устройство для групповогоВОждЕНия ТРАКТОРНыХ АгРЕгАТОВ | 1979 |
|
SU835320A1 |
| Устройство для группового вождения самоходных машин | 1985 |
|
SU1308221A1 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| Способ дублерного вождения машинно-тракторных агрегатов | 1985 |
|
SU1382417A1 |
| Устройство выработки команд управления системы дублерного вождения тракторов | 1980 |
|
SU923397A1 |
7 5
