1
Изобретение относится к грузоподъемным средствам, в частности к гидравлическим иодъемникам для приема - передачи груза с канатной дороги в устройствах траверзной передачи грузов на ходу судов в море и без хода судов у берега.
Известен гидравлический подъемник для приема - передачи груза с канатной дороги, содержащий каретку с вилочным захватом, перемещаемым по вертикальпым направляющим посредством гидроцилиндра подъема с полиспастом и приемную головку.
Такой гидравлический подъемник имеет конструктивно сложный вилочный захват, у которого привод разведения-сведения рычагов, содержащий электродвигатель, червячный редуктор, зубчатую передачу, зубчатый сектор и концевые выключатели, расиоложен непосредственно на нерел1ещаемом корпусе вилочного захвата, кроме того, в нем применяется движущийся кабель для подачи электроэнергии к электродвигателю привода разведения - сведения рычагов и концевым выключателям, что уменьщает надежность и безонасность работы устройства.
Для слежения вилочного захвата за приемной головкой применены вертикальная поворотная щтанга со шпоночными пазами, гидравлический привод поворота щтанги, кулачковая муфта с гидроцилиндром, что требует
сложной гидравлической системы управления.
Целью изобретения является повышение эффективности и надежности работы гидравлического подъемника и обеспечение автоматического слежения вилочного захвата за поворотом нриемпо-передающей головки.
Для этого в предлагаемом подъемнике направляющие выполнены в виде составных
штанг, нижние части которых закреплены на мачте, а верхние - шарнирно связаны с нижними частями и приемно-передающей головкой, при этом на вилочном захвате установлена направляющая втулка, сопрягаемая с установленным на приемно-передающей головке щтырем.
Эти конструктивные отличия позволяют повысить эффективность, надежность и безопасность работы гидравлического подъемника;
отказаться от поворотной щтанги со щноночными пазами, гидравлического привода поворота штанги, кулачковой муфты с гидроцилиндром; существенно уменьшить вес и габариты; упростить конструкцию и систему управления гидравлическим нодъемником и увеличить габариты перемещаемых грузов.
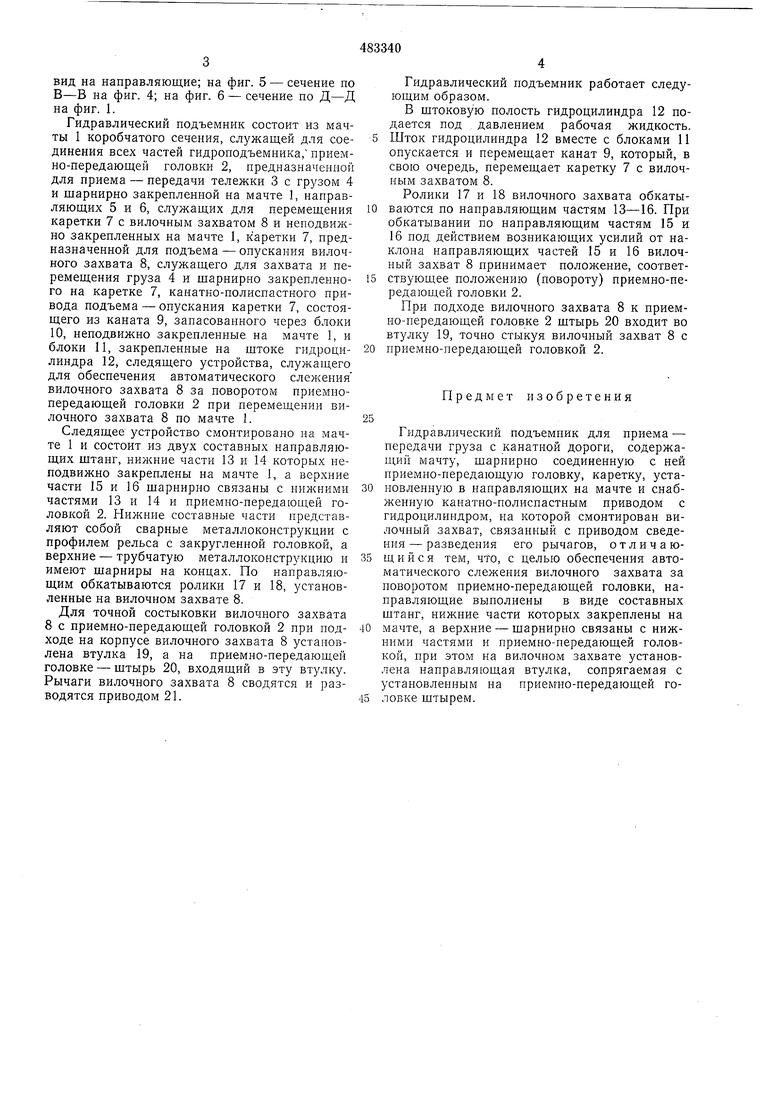
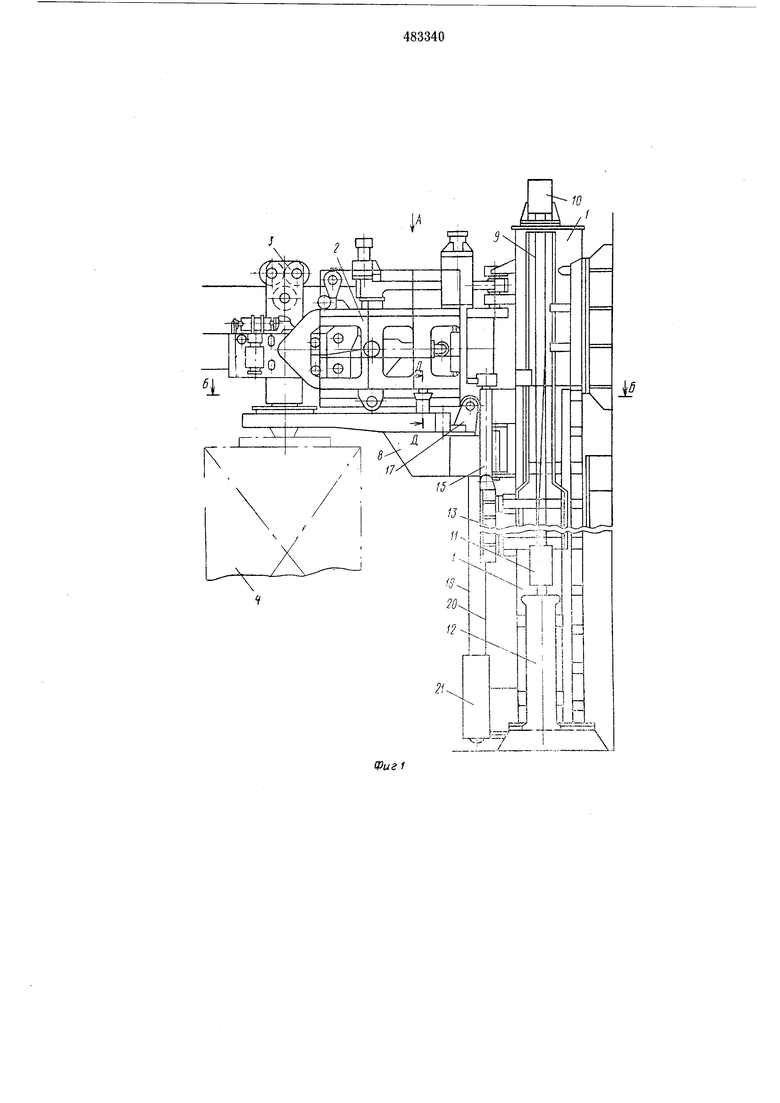
На фиг. 1 изображен предложенный гидравлический подъемник, вид сбоку; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг.
3 - сечение по Б-Б на фиг. 1; на фиг. 4 -
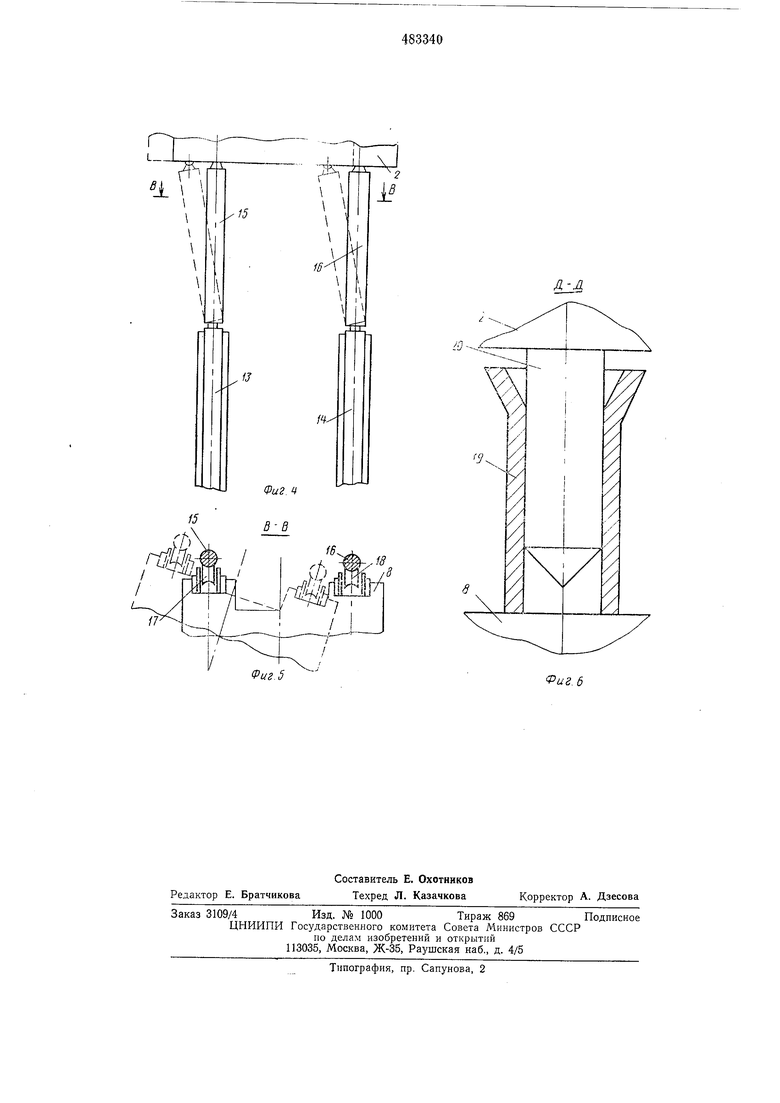
вид на направляющие; на фиг. 5 - сечение по В-В на фиг. 4; на фиг. 6 - сечение по Д-Д на фиг. 1.
Гидравлический подъемник состоит из мачты 1 коробчатого сечения, служащей для соединения всех частей гидроподъемника; приемно-передающей головки 2, предназначенной для приема - передачи тележки 3 с грузом 4 и шарнирно закрепленной на мачте 1, направляющих 5 и б, служащих для перемещения каретки 7 с вилочным захватом 8 и неподвижно закрепленных на мачте 1, каретки 7, предназначенной для подъема - опускания вилочного захвата 8, служащего для захвата и перемещения груза 4 и щарнирно закрепленного на каретке 7, канатно-полиспастного привода подъема - опускания каретки 7, состоящего из каната 9, запасованного через блоки 10, неподвижно закрепленные на мачте 1, и блоки 11, закрепленные на щтоке гидроцилиндра 12, следящего устройства, служащего для обеспечения автоматического слежения вилочного захвата 8 за поворотом приемнопередающей головки 2 при перемещении вилочного захвата 8 по мачте 1.
Следящее устройство смонтировано на мачте 1 и состоит из двух составных направляющих щтапг, нижние части 13 и 14 которых неподвижно закреплены на мачте 1, а верхние части 15 и 16 щарнирно связаны с нижними частями 13 и 14 и приемно-передающей головкой 2. Нижние составные части представляют собой сварные металлоконструкции с профилем рельса с закругленной головкой, а верхние - трубчатую металлоконструкцию и имеют щарниры на концах. По направляющим обкатываются ролики 17 и 18, установленные на вилочном захвате 8.
Для точной состыковки вилочного захвата 8 с приемно-передающей головкой 2 при подходе на корпусе вилочного захвата 8 установлена втулка 19, а на приемно-передающей головке - штырь 20, входящий в эту втулку. Рычаги вилочного захвата 8 сводятся и разводятся приводом 21.
Гидравлический подъемник работает следующим образом.
В щтоковую полость гидроцилиндра 12 подается под давлением рабочая жидкость. Шток гидроцилиндра 12 вместе с блоками 11 опускается и перемещает канат 9, который, в свою очередь, перемещает каретку 7 с вилочным захватом 8.
Ролики 17 и 18 вилочного захвата обкатываются по направляющим частям 13-16. При обкатывании по направляющим частям 15 и 16 под действием возникающих усилий от наклона направляющих частей 15 и 16 вилочный захват 8 припимает положение, соответствующее положению (повороту) приемно-передающей головки 2.
При подходе вилочного захвата 8 к приемно-передающей головке 2 щтырь 20 входит во втулку 19, точно стыкуя вилочный захват 8 с приемно-передающей головкой 2.
Предмет изобретения
Гидравлический подъемник для приема - передачи груза с канатной дороги, содержаП1,ий мачту, шарпирно соединенную с ней приемно-передающую головку, каретку, установленную в направляющих на мачте и снабженную канатно-полиспастным приводом с гидроцилиндром, на которой смонтирован вилочный захват, связанный с приводом сведения - разведения его рычагов, отличающ и и с я тем, что, с целью обеспечения автоматического слежения вилочного захвата за поворотом приемно-передающей головки, направляющие выполнены в виде составных штанг, нижние части которых закреплены на
мачте, а верхние - щарнирно связаны с нижними частями и приемно-передающей головкой, при этом на вилочном захвате установлена направляющая втулка, сопрягаемая с установленным на приемно-передающей головке штырем.
ВидА
из. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроподъемник для приема передачи груза с канатной дороги | 1976 |
|
SU686935A1 |
| ГИДРАВЛИЧЕСКИЙ ПОДЪЕМНИК ДЛЯ ПОДАЧИ ГРУЗА НА КАНАТНУЮ ДОРОГУ | 1973 |
|
SU371145A1 |
| Устройство приема-передачи груза грузовой тележки судовой канатной дороги на принимающем судне | 2022 |
|
RU2788548C1 |
| Устройство для приема и отдачи грузовой тележки при передаче грузов с судна на судно в море на ходу | 1976 |
|
SU667447A1 |
| Устройство для приема и отдачи грузовой тележки | 1972 |
|
SU484121A1 |
| Передающе-приемная головка гидроподъемника | 1980 |
|
SU925748A1 |
| Устройство для стыковки шланговых соединений | 1973 |
|
SU478762A2 |
| Головка устройства приема и передачи грузов | 1972 |
|
SU477043A1 |
| СТАНОК ДЛЯ УПАКОВКИ кип БУМАГИ В ЩИТКИ | 1966 |
|
SU189737A1 |
| Устройство для приема и отдачи грузовой тележки при передаче грузов в море | 1975 |
|
SU613950A1 |
Фиг.5
иг.6
