Известны устройства для син р0яно,г|0 электрииеок ого уиравлеНИЯ неснолькими ваполяительными органами, одил из которых включен в замкнутую следящую систему, содержащую измерительный датчик и усилитель сигнала рассогласования, ai каждый из последуюи1.их нодключе1Н к .выходу собственного и первого иополнительнык органов через преобразователи перемещений в напряжения и усилитель разностного сигнала. , Предлагаемое устройство отли1чается от иввестного тем, что в «ем измерительный датчик следящей системы соединен с дополнительными входами подключенных к исполнительным Органам усилителей разностных сигналов. Такое выполнение устройства позволяет 1новысить точность управлания.
На чертеже показана схема выполнения устройства (вариант), в котором один измерительный датчик используется для управления тремя исполнительными органами в виде двигателей.
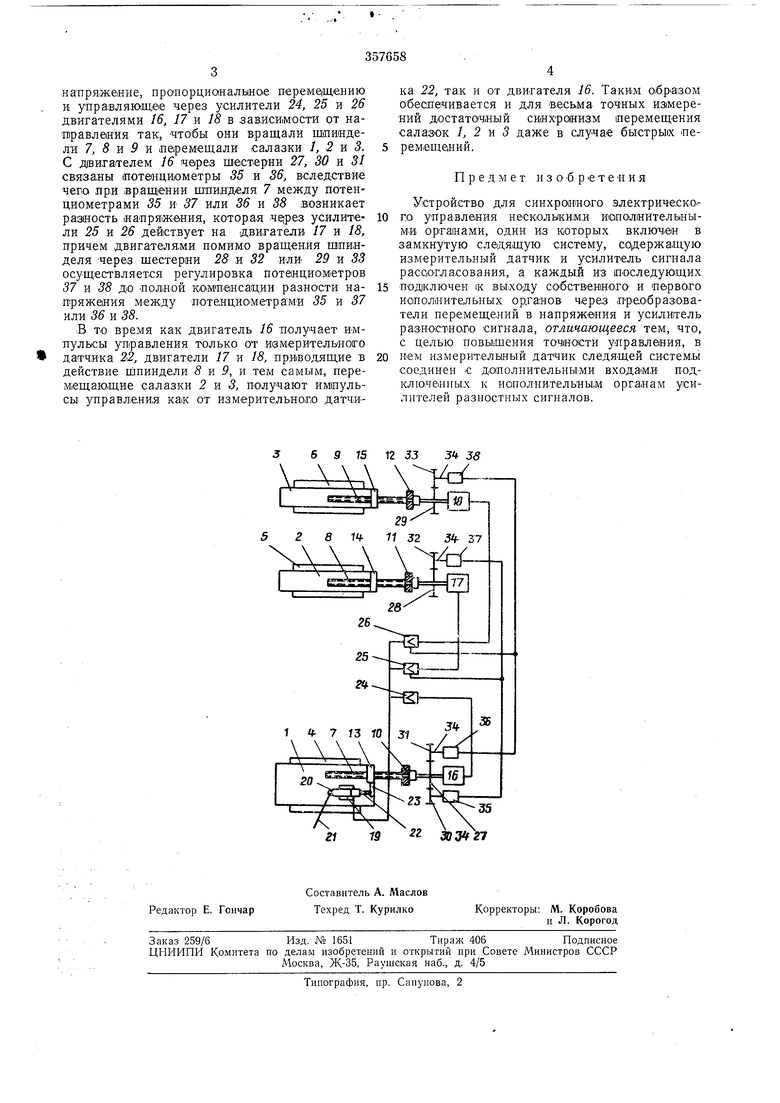
Три салазки 1, 2 vi 3 перемещаются в напр1авляющих 4, 5 и 6 при помощи щпинделей 7, 8 и 9, находящихся на прикрапленных к п.рибору опорах 10, 11 и 12 и. зацепляющихся с гайками 13, 14 и 15, пря крепленным и к салазкам. Шпиндели приводятся в действие питаемыми от сети двигателями 16, 17 и 18.
На салазках / в направляющей 19 перемещаются вспомогательные салазки 20, на которых с одной стороны находится ща:рН|Ирный рЫчаг 21, а с другой стороны - нзмермтельный датчик 22, находящийся в постоянно.м контакте с пр,икре|плвнным к салазкам 1 у|по,ром 23.
Двигатели 16, ,17 и 18 через усилитель сигнала рассогласования 24 и усилители разностных сигналов 25 и 26 связаны с измерительным датчиком 22. На шнинделяк 7, 8 v. 9, приводимых в действие двигателя.мн 16, 17 и 18, закреплены на клиньях щестерни 27, 28 и 29. С щестерней 27 зацепляются еще две
шестерни 30 и 31, а с щестерня,мн 28 и 29 зацепляются щестерни 32 и 33, соответственно. Шестер1ни 30, 31, 32 и 33 связаны чеpei3 оси 34 с потенциометрами 35, 36, 37 и 38, выполняющими функции преобразователей перемещений в напряжения.
|При1нци1Н действия уст)ройства следую1щий. Рычаг 21 поворачивается вокруг неподвижной оси (на чертеже не показана.) параллельно к плоскости пере|Меще.ния салазок / и тем самым перемещает вспомогательные сала.З|КИ 20 с измерительным датчиком 22 в направляющей 19. В соответствии с этим перемещением изменяется положение вспом.огательных салазок 20 и измери тельного датчика 22,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления деформациями в системе СПИД | 1982 |
|
SU1071371A1 |
| Автооператор | 1981 |
|
SU1047653A1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| Устройство для шлифования цилиндрических,конических и профильных поверхностей | 1974 |
|
SU523792A1 |
| Станок для двусторонней бескопирной чистовой обработки лопастей | 1983 |
|
SU1150050A1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОТСЧЕТА ПЕРЕМЕЩЕНИЙ | 1972 |
|
SU358103A1 |
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509892C1 |
| АГРЕГАТНЫЙ ГОРИЗОНТАЛЬНО-ФРЕЗЕРНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ | 1973 |
|
SU397313A1 |
| Устройство для гашения вибраций в металлорежущем станке | 1980 |
|
SU884954A1 |
| Кольцепрокатный стан | 1973 |
|
SU936796A3 |
