Изобретение относится к станкостроительной и инструментальной промышленности.
Известен стааюк для насекащия на-пильников с ударНЫм механизмом, по обеим сторонам которого -распОЛожены неподвижные и подВ:ижные гребенки шагового траиспортера, перемешающего загото-Вки с оер-еворотом их на рабочей позиции вдоль своей продольной оси на одну грань при подъеме подвижных гребеНОк, движущихся от рычажно-кривошипного механизма. Кривошип совершает полный ИЛИ частичный поворот посредством гидроцилиндра с регулируемым ходом поршня.
В известпом станке кривошипы, преодолевая верхнюю мертвую точку, вторую половину оборота делают под действием пружины, посаженной на эксцентричный палец вала кривошипа, что влечет за собой резкое падение подвижных линеек. Кроме того, чередование режимов работы транспортера зависит от хода гидроцилиндра и требует применения специального механизма с упораМИ, ограничивающими ход гидроцилиндра, что, в свою очередь, усложняет привод шагового транспортера.
Предлагаемый автомат отличается тем, что привод шагового транспортера выполнен в виде подвижного в горизонтальной плоскости ползуна с шарнирно закрепленным рычагом. Одно плечо рычага крепится на подвижной
гребенке, а другое взаимодействует с ее кулачком подъема, вращающимся на валу, который одним концом закреплен па ползуне. Кулачок подъема кинематически связан с приводом ползуна. Такое выполнение автомата обеспечивает плавное движение вниз подвижных гребенок и позволяет упростить привод шагового транспортера. На фиг. 1 показан общий вид описываемого
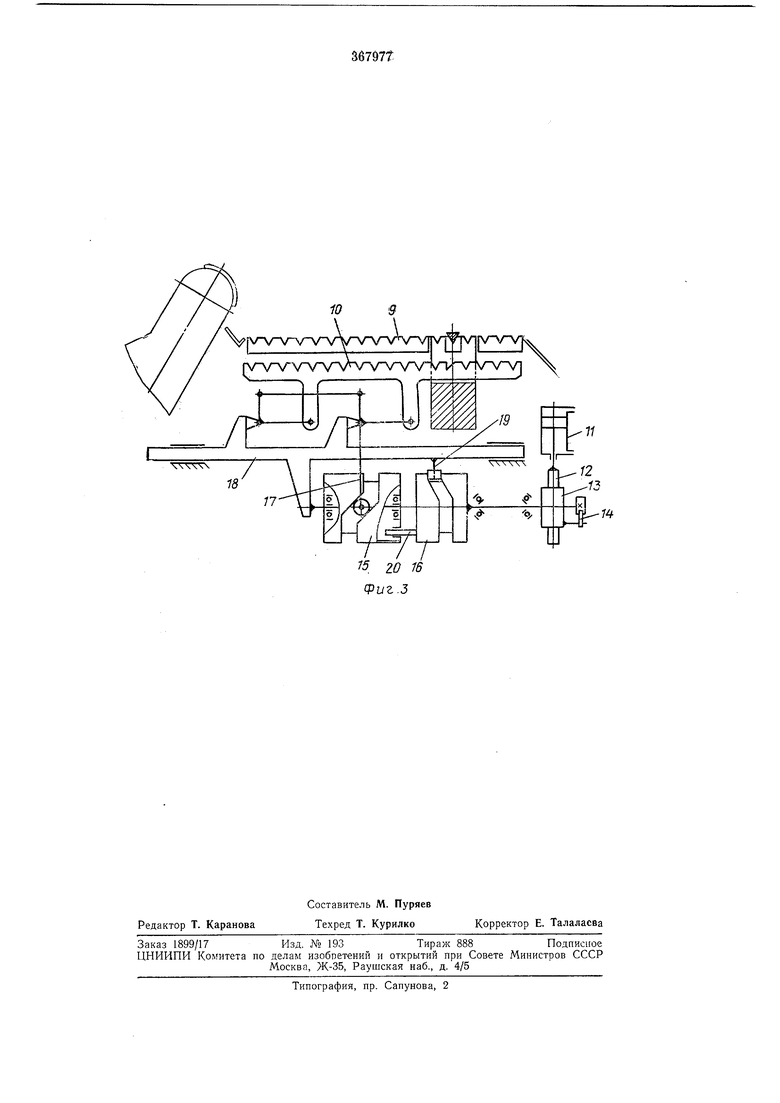
автомата; на фиг. 2 - то же, вид сбоку по стрелке А на фиг. 1; на фиг. 3 - схема щагового транспортера-кантователя.
На станине / расположен перемещающийся с помощью ходового винта 2 ударный механизм 3, подъем и опускание которого осуществляется гидроцилиндрами 4. На неподвижной наковальне 5 размещается обрабатываемая заготовка 6, подаваемая шаговым транспортером-кантователем 7 от бункерного загрузочного устройства 8. Транспортер-кантователь, состоящий из двух неподвижных гребенчатых линеек 9 и расположенных параллельно им двух подвижных гребенок W, приводится в движение гидроцилиндром 11с постояпной величиной хода, который зубчатой рейкой 12 через реечную щестерпю 13 и храповой механизм 14 проворачивает замкнутые торцовые кулачки 15 и 16. Кулачок 15 через рычаг 17 сообщает гребенкам 10 вертикальный ход. Ползун 18 вместе с гребенками 10 и кулачком 15 перемещается на величину шага транспортера торцевым кулачком 16 посредством пальца 19, сообщая гребенкам 10 горизонтальный ход. Таким образом, при работе автомата подвижные гребенки 10 могут получать, в зависимости от режима работы транспортера, вертикальные движения (подъем и опускание) при неподвижном ползуне 18, что соответствует режиму переворота заготовки, во время которого заготовка, находящаяся в рабочей позиции «аковальни 5, переворачивается на одну грань Если же за подъемом линеек последует перемещение их в горизонтальном направ лении на величину щага транспортера с последующим опусканием и возвратом в исход НО.М положение, то такой состав движении подвижных линеек соответствует транспортирующему режиму работы транспо.ртера-кантователя, во время которого обработанная заготовка удаляется из рабочей позиции, а на ее место подается новая. Последовательность режимов работы транспортера-кантователя запрограммирована на кулачках /5 и 16. амыкание роликов рычага 17 и пальца 19 вулачках -кинематическое. Торцовый кулаок 15, перемещающийся в осевом направлеии вместе с ползуном 18, приводится во враение от «улачка 16 посредством скользящего пальца 20. Предмет изобретения Автомат для насекания напильников с ударным механизмом, по обеим сторонам которого расположены неподвижные и подвижные гребенки шагового транспортера, перемещающего заготовки с переворотом их иа рабочей позиции при подъеме подвижных гребенок вдоль своей продольной оси на одну грань, отличающийся тем, что, с целью плавного движения подвижных пребенок вниз и упрощения привода шагового транспортера, последний выполнен в виде подвижного в горизонтальной плоскости ползуна с щарнирно закрепленным рычагом, одно плечо которого закреплено на подвижной гребенке, а другое взаимодействует с кулачком ее подъема, вращающимся на валу, одним концом закрепленным на ползуне, причем кулачок подъема кинематически связан с приводом ползуна
Вид А
Фиг.2
75 20 rS Фиг.5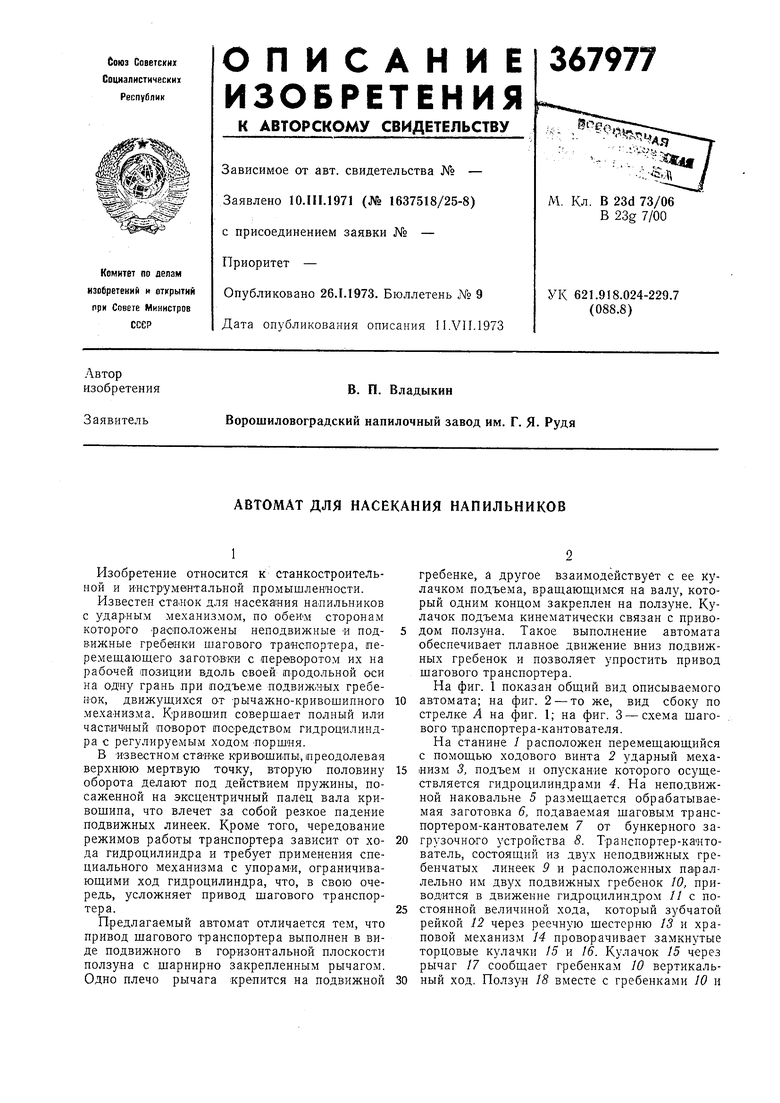
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ НАСЕКАНИЯ НАПИЛЬНИКОВ | 1969 |
|
SU237563A1 |
| Автомат для насекания надфилей | 1979 |
|
SU772760A1 |
| Торцеобрабатывающий автомат | 1981 |
|
SU986713A2 |
| Автомат для контроля линейных параметров дисков фрикционов | 1975 |
|
SU766670A1 |
| Шаговый конвейер | 1978 |
|
SU749757A1 |
| Автомат для насекания надфилей | 1986 |
|
SU1360922A1 |
| Шаговый конвейер | 1972 |
|
SU519368A1 |
| Автомат для сборки радиаторов | 1982 |
|
SU1042944A1 |
| Устройство для проверки магнитных головок | 1980 |
|
SU892472A1 |
| АВТОМАТ ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ | 1973 |
|
SU383571A1 |