1
Изобретение может быть использовано в лесной и деревообрабатывающей промышленности при повале деревьев и раскряжевки древесины.
Известны переносные моторные пилы, включающие двигатель, пильный аппарат и раму с рукоятками управления, соединенную при помощи упругих элементов с двигателем, центр тяжести которого расположен в центре жесткости системы упругих элементов.
Цель изобретения - снизить вибрации на рукоятках управления до уровня санитарных норм по всем направлениям.
Для этого главные центральные оси инерции двигателя совмещены с главными центральными осями инерции рамы и главными Центральными осями жесткости упругих элементов, а центр тяжести двигателя совмещен с плоскостями инерционного возбуждения от двигателя.
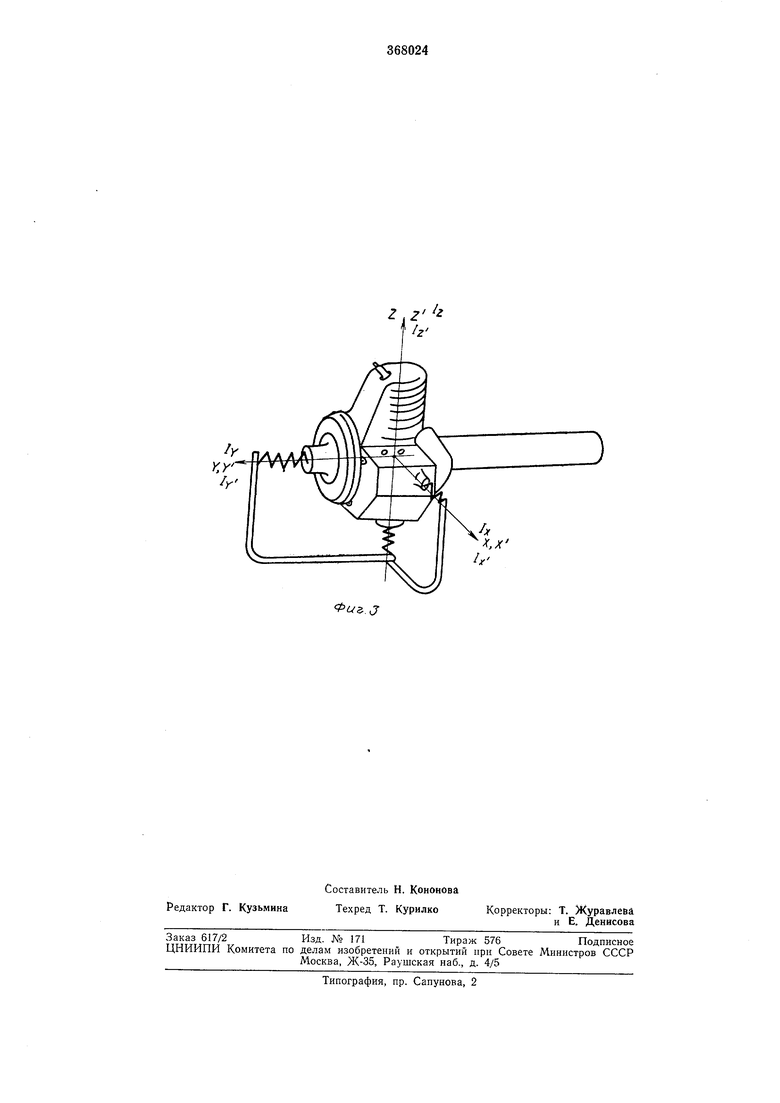
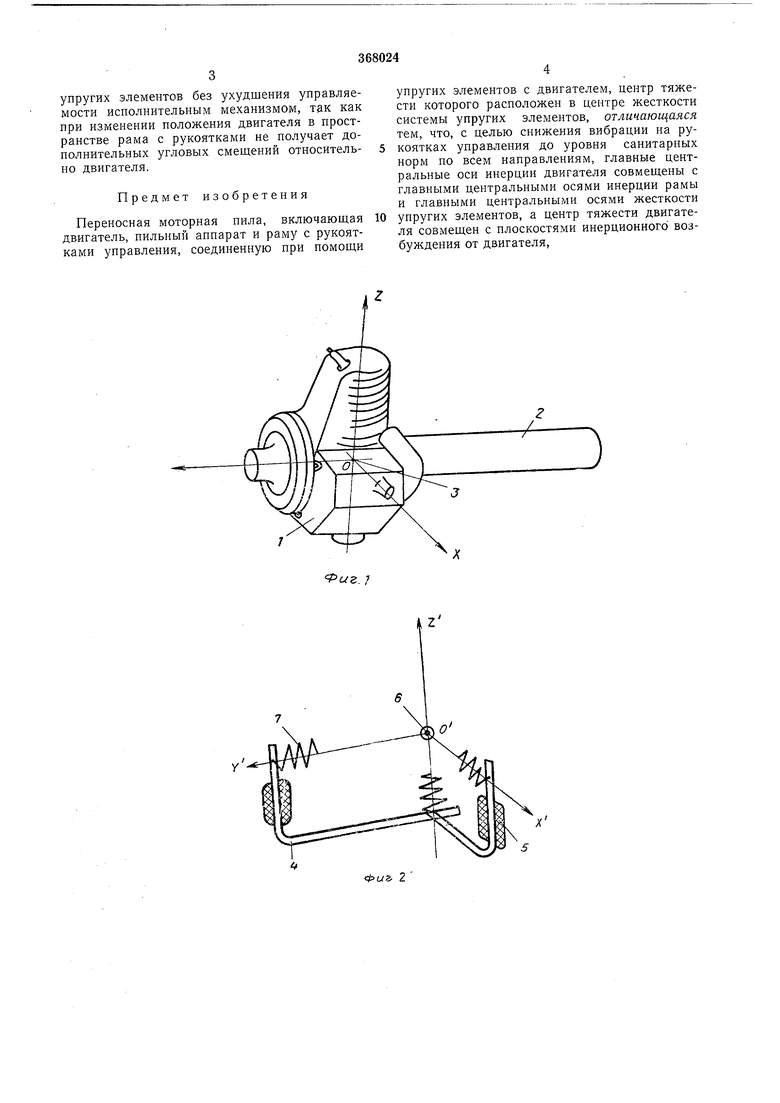
На фиг. 1 изображена описываемая моторная пила, общий вид; на фиг. 2 - рама с рукоятками управления и упругими элементами, общий вид; на фиг. 3 - двигатель с рамой и рукоятками управления в сборе, общий вид.
Переносная моторная пила содержит двигатель /, жестко связанный с пильным аппаратом 2 и имеющий центр тяжести 3, служащий началОМ коорлТ,н«атных осей ОК, OF, OZ.
Координатные оси указывают направление главных центральных осей инерции двигателя 1х, iy, /2 и плоскостей инерционного возбуждения YOZ и XOZ (т. е. ось OZ совпадает с осью
цилиндра двигателя).
Рама 4 с рукоятками управления 5 имеет центр тяжести 6, служащий началом координатных осей О Х , ОУ и OZ. Эти координатные оси указывают направление главных
центральных осей .инерции рамы //, 1у // и главных центральных осей жесткости упругих элементов 7, при помощи которых рама соединена с двигателем. Главные центральные оси жесткости упругих элементов пересекаются в точке О (начало координатных осей), которая является центром жесткости упругих элементов.
Соединение рамы с двигателем осуществлено при помощи упругих элементов 7 таким
образом, чтобы координатные оси ОХ, ОУ и OZ совпадали с осями О Х , OY и, OZ, а центр тяжести двигателя 3 - с центром тяжести рамы 6. В процессе работы двигателя неуравновешенные силы инерции вызывают появление вибраций на рукоятках управления 5. Эти вибрации на рукоятках снижаются при подвеске рамы по схеме, которая позволяет значительно уменьшить суммарную жесткость
упругих элементов без ухудшения управляемости исполнительным механизмом, так как при изменении положения двигателя в пространстве рама с рукоятками не получает дополнительных угловых смещений относительно двигателя.
Предмет изобретения
Переносная моторная пила, включающая двигатель, пильный аппарат и раму с рукоятками управления, соединенную при помощи
упругих элементов с двигателем, центр тяжести которого расположен в центре жесткости системы упругих элементов, отличающаяся тем, что, с целью снижения вибрации на pvкоятках управления до уровня санитарнь1х норм по всем направлениям, главные центральные оси инерции двигателя совмещены с главными центральными осями инерции рамы и главными центральными осями жесткости упругих элементов, а центр тяжести двигателя совмещен с плоскостями инерционного возбуждения от двигателя,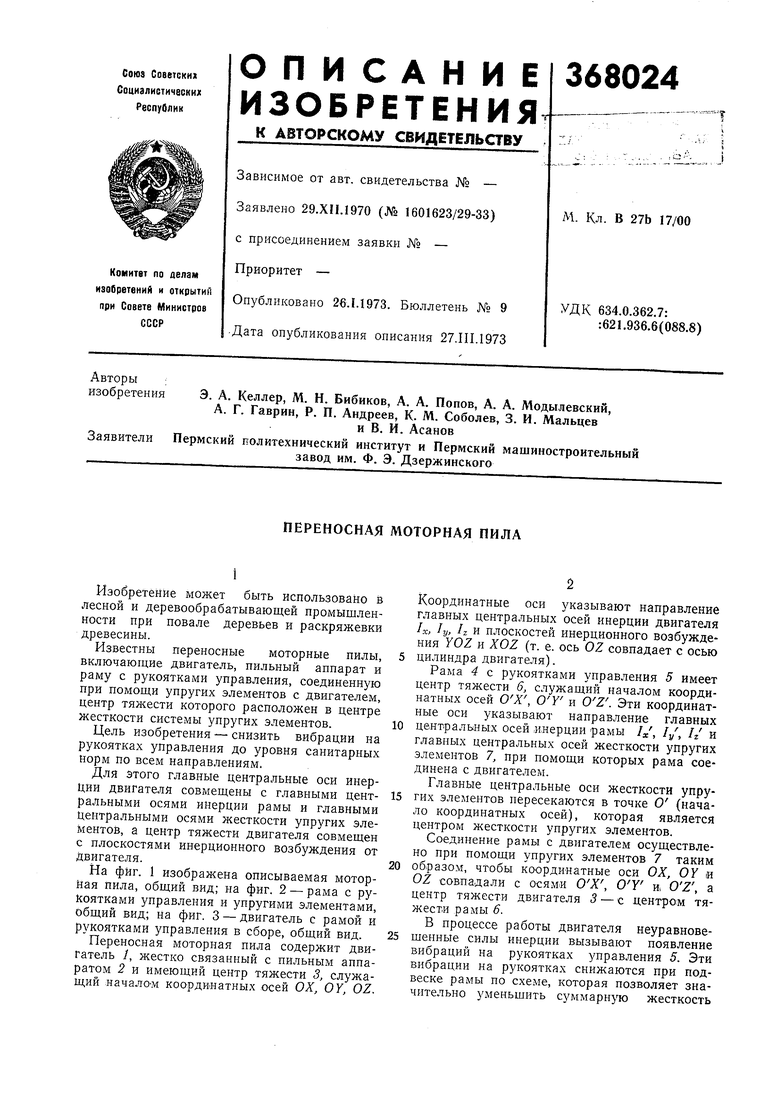
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕНОСНАЯ МОТОРНАЯ ПИЛА | 1972 |
|
SU419377A1 |
| ПЕРЕНОСНАЯ МОТОРНАЯ ПИЛА | 1972 |
|
SU414084A1 |
| Переносная моторная пила | 1973 |
|
SU447249A1 |
| Переносная моторная пила | 1975 |
|
SU541665A1 |
| Переносная моторная пила | 1975 |
|
SU865658A1 |
| Переносная моторная пила | 1980 |
|
SU939187A1 |
| Переносная моторная пила | 1978 |
|
SU686869A2 |
| Переносная моторная пила | 1982 |
|
SU1073092A1 |
| Переносная моторная пила | 1974 |
|
SU511205A1 |
| Переносная моторная пила | 1980 |
|
SU885012A1 |