1
Предлагаемое изобретение относится к следящим системам, предназначенным для синхронной и синфазной передачи угла поворота задающей оси на отрабатывающую ось, и особенно эффективно может быть использовано при большой угловой скорости вращения задающей оси (до 1000 об/мин) и малой мощности на ней (в то время как на отрабатывающей оси мощность может быть любой).
Известны скоростные следящие системы, содержащие датчик входного сигнала, выход которого соединен со входом датчика обратной связи, выход которого подключен через последовательно соединенные предварительный усилитель и усилитель мощности к исполнительному двигателю, выход которого связан с датчиком обратной связи и измерителем скорости выходного сигнала, а также задатчик скорости входного сигнала, подключенный ко входу задающего двигателя, выход которого связан со входом датчика входного сигнала и со входом измерителя скорости входного сигнала, причем выход усилителя мощности через корректирующую цепь обратной связи подключен ко входу предварительного усилителя.
Такие системы имеют значительную.динамическую ошибку при воспроизведении входных сигналов, изменяющихся с большой скоростью.
2
Предлагаемая система отличается от известных тем, что в нее введены датчик компенсирующего сигнала, вход которого механически связан с выходом задатчика скорости входного сигнала, а выход подключен ко входу усилителя мощности, а также релейный элемент и элемент сравнения, входы которого соединены с выходами измерителя скорости входного и выходного сигналов, а выход подключен ко входу релейного элемента, замыкающий контакт которого включен между входом предварительного усилителя и общей шиной.
Такое построение устройства позволяет значительно повысить точность обработки входного сигнала.
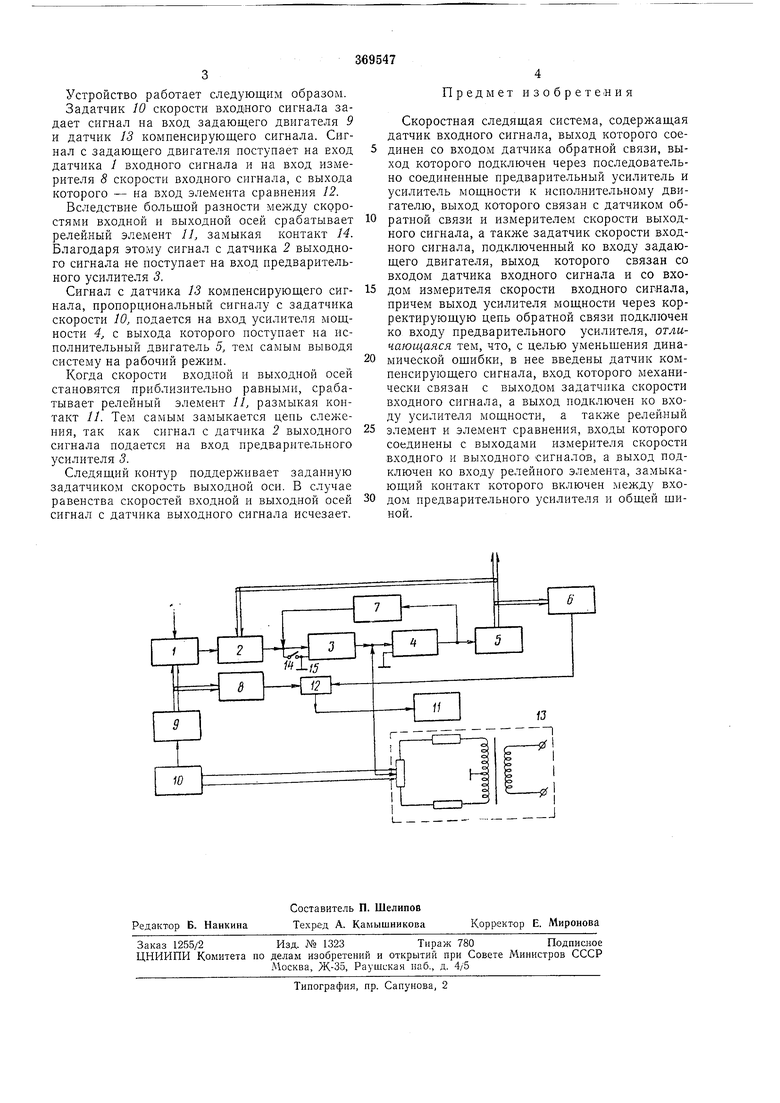
Блок-схема устройства приведена на чертеже.
Система содержит датчик / входного сигнала, датчик 2 выходного сигнала, предварительный усилитель 5, усилитель мощности 4, исполнительный двигатель 5, измеритель 6 скорости выходного сигнала, корректирующую
цепь 7 обратной связи, измеритель 8 скорости входного сигнала, задающий двигатель 9, задатчик 10 скорости входного сигнала, релейный элемент 11, элемент сравнения 12, датчик 13 компенсирующего сигнала, замыкающий
контакт 14, общую шину 15.
Устройство работает следующим образом.
Задатчик 10 скорости входного сигнала задает сигнал на вход задающего двигателя 9 и датчик 13 компенсирующего сигнала. Сигнал с задающего двигателя поступает на вход датчика / входного сигнала и на вход измерителя 8 скорости входного сигнала, с выхода которого - на вход элемента сравнения 12.
Вследствие большой разности между скоростями входной и выходной осей срабатывает релейный элемент 11, замыкая контакт 14. Благодаря этому сигнал с датчика 2 выходного сигнала не поступает на вход предварительного усилителя 5,
Сигнал с датчика 13 компенсирующего сигнала, пропорциональный сигналу с задатчика скорости 10, подается на вход усилителя мощности 4, с выхода которого поступает на исполнительный двигатель 5, тем самым выводя систему на рабочий режим.
Когда скорости входной и выходной осей становятся приблизительно равными, срабатывает релейный элемент 11, размыкая контакт //. Тем самым замыкается цепь слежения, так как сигнал с датчика 2 выходного сигнала подается на вход предварительного усилителя 3.
Следящий контур поддерживает заданную задатчиком скорость выходной оси. В случае равенства скоростей входной и выходной осей сигнал с датчика выходного сигнала исчезает.
Предмет изобретения
Скоростная следящая система, содержащая датчик входного сигнала, выход которого соединен со входом датчика обратной связи, выход которого подключен через последовательно соединенные предварительный усилитель и усилитель мощности к исполнительному двигателю, выход которого связан с датчиком обратной связи и измерителем скорости выходного сигнала, а также задатчик скорости входного сигнала, подключенный ко входу задающего двигателя, выход которого связан со входом датчика входного сигнала и со входом измерителя скорости входного сигнала, причем выход усилителя мощности через корректирующую цепь обратной связи подключен ко входу предварительного усилителя, отличающаяся тем, что, с целью уменьшения динамической ошибки, в нее введены датчик компенсирующего сигнала, вход которого механически связан с выходом задатчика скорости входного сигнала, а выход подключен ко входу усилителя мощности, а также релейный элемент и элемент сравнения, входы которого соединены с выходами измерителя скорости входного и выходного сигналов, а выход подключен ко входу релейного элемента, замыкающий контакт которого включен 1ежду входом предварительного усилителя и общей шиной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1989 |
|
SU1732329A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| КОМБИНИРОВАННЫЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2007747C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Следящая система | 1988 |
|
SU1645938A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
