1
Известны автоматы для сверления отверстий в печатных платах, снабженные многошпиндельной головкой с независимым приводом подачи каждого шпинделя.
Предлагаемый автомат отличается тем, что привод выполнен в /виде шаблона-программоносителя с отверстиями на перекрестиях координатной сетки, в которых в соответствии со схемой платы установлены толкатели, взаимодействуюш,ие с соответствующими шпинделями.
Это повышает производительность автомата.
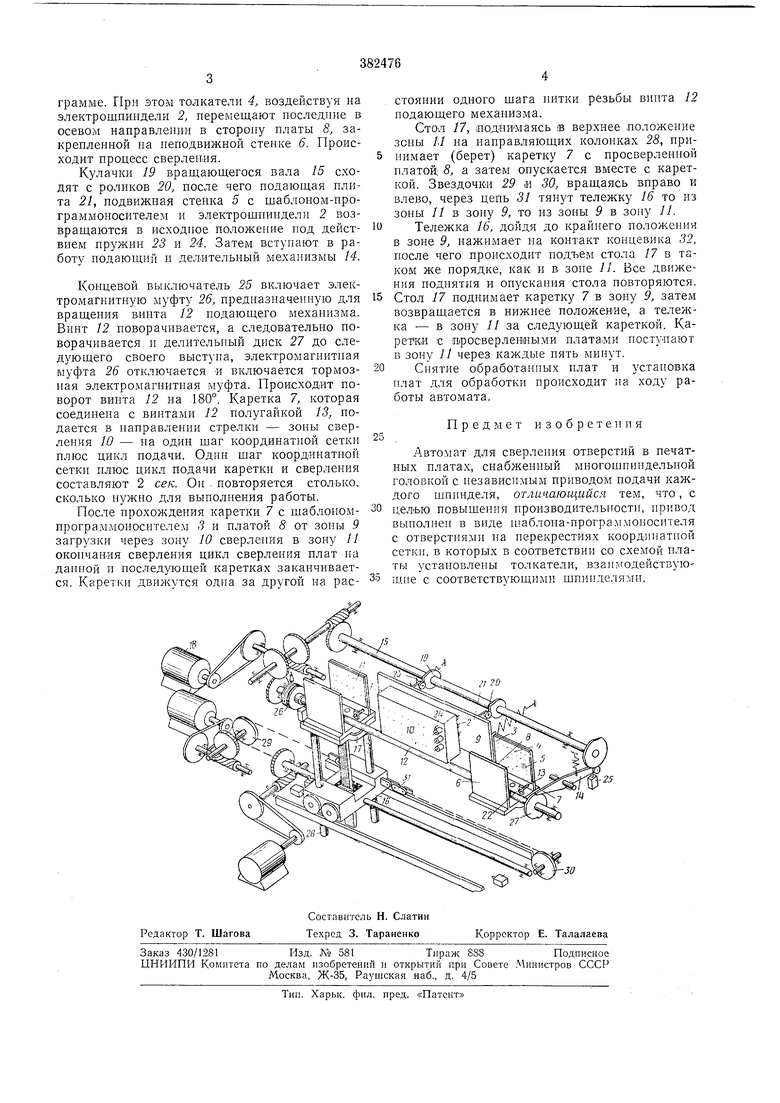
На чертеже изображена схема предлагаемого автомата.
Автомат снабжен многошпиндельной головкой / с независимым приводом подачи каждого электрошпинделя 2. В головке расположено три ряда электрошпинделей 2 по двадцать пять шпинделей в каждом ряду, следовательно всего семьдесят пять шпинделей. Электрошпиндели 2 расположены по диагонали в горизонтальном положении, каждый шпиндель находится от другого на расстоянии, кратном координатной сетке, а по вертикали на расстояний одного шага координатной сетки.
Привод подачи электрошпинделей выполнен в виде шаблона-программоносителя 3 с отверстиями на перекрестках координатной
сетки, в которых в соответствии со схемой платы установлены толкатели 4, взаимодействующие с соответствующими шпинделями 2.
Шаблон-программоноситель 3 с толкателями 4 устанавливают на подвижной стенке 5, а на ненодвижную стенку 6 каретки 7 укладывают заготовку платы 8, подлежащей обработке.
В автомате имеются пять кареток 7, которые двигаются по замкнутому кольцу, транспортируя шаблон-программоноситель 3 л платы 8 через зону 9 загрузки, зону сверления 0, зону } окончания сверления; подающий механизм с винтом 12, с которым каретки 7
соединяются полугайкой 13; делнтельный механизм 14; кулачковый вал 15; тележку 16 с подвиж1НЫ;м В вертикально-м иатаравлении столом 17 для подачи -каретки 7 в зону загрузки 9 и приема каретки из зоны окончания сверления.
Автомат работает следующим образом. От электродвигателя 18 вращение передается кулачковому валу 15, кулачки 19 которого, вращаясь вместе с валом 15, воздействуют на ролики 20. Последние толкают подающую плиту 2, находящуюся на направляющих колонках 22. Подающая плита 21, в свою очередь, толкает подвижную стенку 5, несущую на себе закрепленный шаблон-программоноситель 3 с
установленным, на нем толкателями 4 по про
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический универсальный многошпиндельный координатно-сверлильный станок | 1959 |
|
SU130315A1 |
| АВТОМАТИЧЕСКИЙ УНИВЕРСАЛЬНЫЙ | 1967 |
|
SU194517A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ПРОГРАММНОГОУПРАВЛЕНИЯ | 1968 |
|
SU221463A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ, НАПРИМЕР, КООРДИНАТНО-СВЕРЛИЛЬНЫМ СТАНКОМ | 1971 |
|
SU310739A1 |
| Автомат для сборки мебельных ящиков | 1986 |
|
SU1315309A1 |
| Система программного управления станком | 1978 |
|
SU867531A1 |
| Автомат для обработки тормозных накладок | 1987 |
|
SU1542780A1 |
| Многошпиндельный токарный станок | 1990 |
|
SU1785828A1 |
| Сверлильный станок | 1986 |
|
SU1465177A1 |
| Многопозиционный автомат | 1981 |
|
SU1047613A1 |
