(1
Изобретение относится к области сборочных автоматов и может -использоваться в любой отрасли машияосгроения, где есть необходимость сборки деталей типа 1валик-втулка.
Известен автомат для сборки, деталей типа валик-втулка, содержащий станину, механизм управления и взаимодействующий с ним исиолнительный механизм, состоящий из призмы для базирования втулки, лотков для подачи и съема деталей, буккерных загрузочных устройств и вибратора с якорем.
Цель изобретения - .повысить производительность и надежность устройства.
Это достигается тем, что на станине размещены продольные направляющие, на -которых устано.влен вибратор с .вибрирующим стержнем, жестко закрепленным на якоре вибра1тора; призма установлена с возможностью возвратно-поступательного перемещения перпендикулярно направляющим; лоток для съема деталей установлен с возможностью возвратно-качательного движения вокруг оси, парал.лельной направляющим, а механ-изм хпранленил выполне.н в виде рабочего цилиндра, щток которого жестко связан с траверсой, Несущей три толкателя, один из которых служит для установки -втулки на стержень вибратора, второй - для перемещения призмы 1 третий - для отвода вибратора с позиции сборки. Кроме того, вибрирующий
стержень выполнен в виде усеченного конуса с углом конусности в пределах б-12°, верщина которого расположена со стороны призмы.
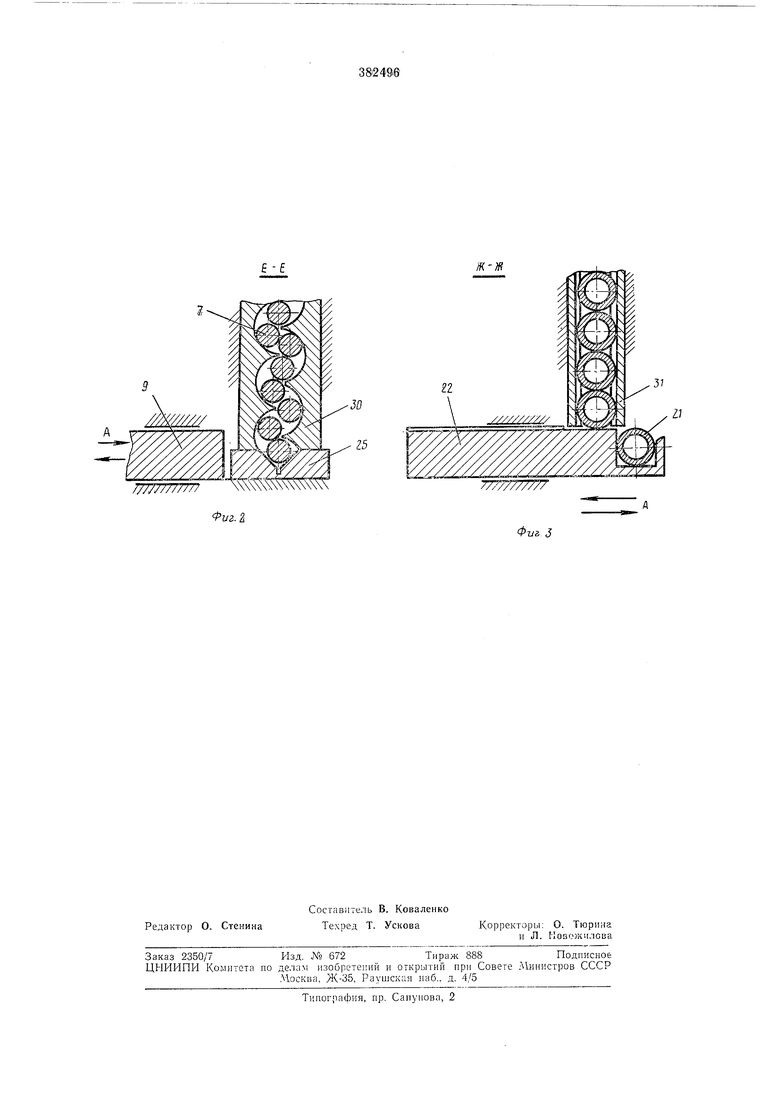
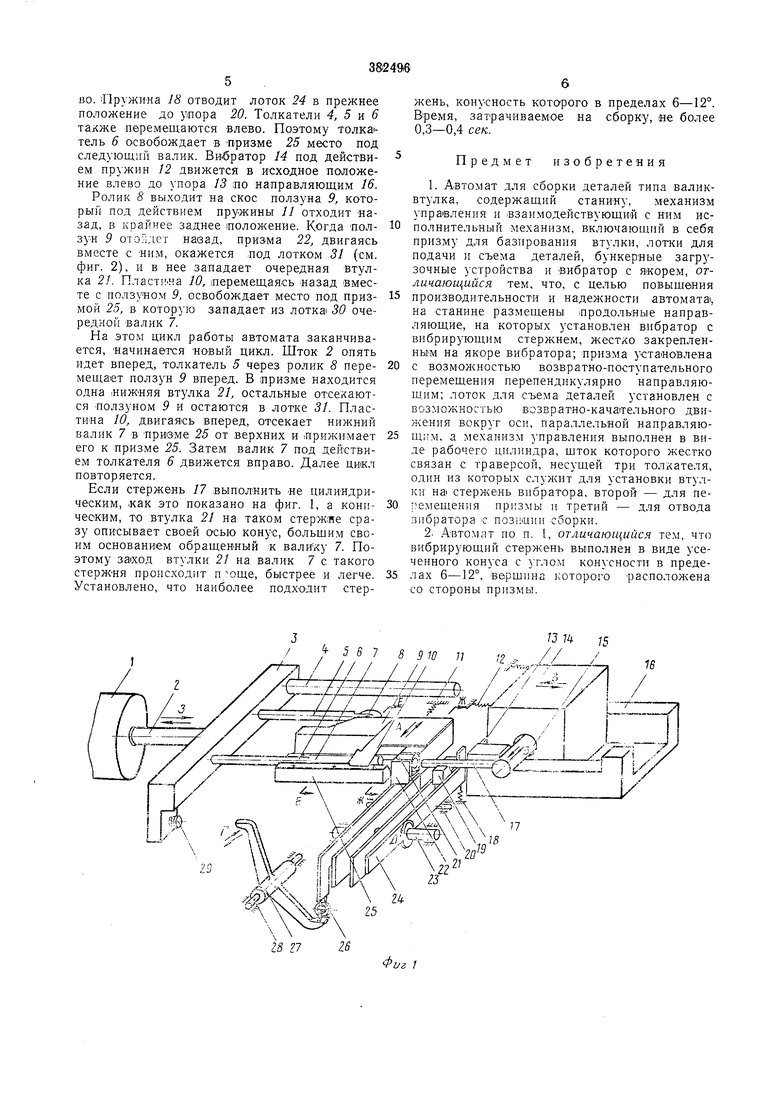
5 На фиг. 1 схематично изображен обиип BH.I предлагаемого автомата; на фиг. 2 - сечение Е-Е «а фиг. 1; иа фиг. 3 - сечение Ж-Ж на фиг. 1. Предлагаемый автомат содержит механизм
0 управления, который состоит из рабочего цилиндра 1 со щтоком 2, на конце которого жестко заКреплена траверса 3. На траверсе 3 установлены толкатели 4, 5 i 6, & также регулируемый упор 29. На толкателе 5 укреи5 лен роли1К 8, который может вращаться.
Собираемые валики 7 нахо-дятся в лоткезмейке 30 (см. фит. 2), нижний из них находится на призме 25, закрепленный жестко к пл.ите автомата (илита на фигурах не пока0 за-на). Со.пря.гаемые с валиками 7 втулки 21 находятся в лотке 31. Детали в лотки 31 и 30 попадают из бункерных загрузочных устройств, которые на рисунках не показаны. Ниж«яя -втулка 21 находится в иризме 22, которая жестко скреплена с ползуном 9, так что они. .представляют собой одно тело. На ползун 9 действует пружи-на //. Ползун 5 может перемещаться в направляющих по стрелкам А. Лотки 30 и 31 крепятся через
0 кронштейны (на фигурах кронштейны не показаны) к ллите автомата. Сверху к ползуну 9 прикреплена ,инная .пластина W, лоторая выполияет две функции: прижимает валик 7 к призме 25 и в то же время отсекает верхвие валики от нижяего, лежащего в призме 25.
На на1правляющих 16 установлен вибратор 14, на который воздействуют пружины J2, оттягивая вибратор 14 влево до упора 13. На колеблющемся органе 15 вибратора 14 (колеблющийся орган вибратора может представлять собой, например, якорь электромагнита) жестко укреплен стержень 17. Весь вибратор 14 .может перемещаться по направляющим 16 в направлении стрелок В; подвижный орга« 15 (якорь вибратора электромагнитного типа) соверщает со стержнем 17 колебания по стрелкам Б, т. е. поперек оси валика 7. Под стерж«ем находятся упорвилка 19 и пластинчатый лоток 24 (на фиг. 1 лоток 24 изображен состоящим из четырех пластин), который установлен «а оси 23, относительно которой он соверщает возвратновращательное движение по стрелкам Д. С одного конца лоток 24 оттянут до упора 20 пружиной 18, с другой - связан гибкой связью 26 (-несколько колец) с рычагом 27, устащовленньгм .на оси 28. Рычаг 27 может вращаться относительно оси 28 цо стрелкам Г.
Упор-вилка 19 прикреплен жестхо к плите автомата, а пластины лотка 24 расположены так, что, поворачиваясь, не задевают упорвилку 19 и свободно проходят мимо призмы 22.
Предлагаемый автомат работает следующим образом.
Исходно1е положение перед сборкой - валик 7 находится в неподвижной призме 25, втулка 21 - в подвижной призме 22, которая под действием толкателя 5 с роликом 5 переместилась вперед так, что ось втулки 21 сташа приблизительно соосна оси валика 7. Перемещение пр.измы вперед произощло потому, что ролик 8 подал вперед ползун 9, действуя на скос ползуна 9, с которым призма 22 жестко связана.
Сборка валика 7 с втулкой 21 состоит в следующем. Шток 2 с траверсой 5 перемещается дальше вперед (слева направо) по стрелке 3. Но ползун 9 (и призма 22) больше не движется по стрелке А, так как ролик 8 перемещается уже не по скосу ползуна 9, а по его плоскости, параллельной оси толкателя 5. В это время толкатель 6 начинает воздействовать на валик 7 и двигает его вправо. Валик 7 в некоторый момент времени входит в контакт с левым торцом втулки 21. В идеальном случае, когда их оси совпадают, валик 7 войдет в отверстие втулки 21, и сборка сразу осуществится.
Однако В общем случае оси собираемых деталей 7 и 21 не совпадают (например, из-за эксцентричности отверстия втулки, износа призм 25 и 22). Поэтому валик 7 толкает
втулку 21 вправо, которая, сдвигаясь в этом направлении, надева ется на вибрирующий стержень 17, имеющий диаметр меньщий, чем внутреннее отверстие втулки 21, на 1-3 мм.
Так как укрепленный на якоре 15 вибратора 14 стержень 17 вибрирует (по стрелкам Б), то надетая на него втулка 21 начинает интенсивно вращаться, обкатывая стержень 17, с угловой скоростью, равной частоте колебаний якоря вибратора.
Валик 7 продолжает двига ться дальще. Однако, когда между торцами стержня 17 и валика 7 остается зазор величиной 1-2 мм, в действие вступает толкатель 4, который начинает перемещать вибратор 14 вправо, растягивая пружины 12. Вместе с вибратором движется вправо и стержень 17, так что с этото момента времени расстояние в 1-2 мм между торцами стержня /7 и валика 7 остается неизменным.
Втулка 21, находящаяся теперь на вибрирующем стержне /7 и вращающаяся на нем, также перемещается со стержнем 17 вправо, но, дойдя до упора-вилки 19, останавливается, продолжая вращение и колебания столь же интенсивно, как и- раньше. Поскольку стержень /7 уходит вместе с вибратором 14 вправо, втулка 21 сходит постепенно со стержня J7, начиная описывать конус, большое основание которого обращено к валику 7.
Валик 7 под действием толкателя 6 продолжает перемещаться вправо, втулка остановлена вилкой-упором 19, поэтому валик 7 приближается ко втулке 21, которая быстро и легко надевается на движущийся вправо валик 7. Это обусловлено высокой скоростью вращения втулки- при одновременном колебательном движении и «накрывающей валик 7 траектории левого торца 21. Подобные движения и траектория позволяют втулке 21 даже при очень больщих линейных и угловых смещениях соединиться с валиком.
Упор-вилка 19 не только останавливает втулку 21 при ее движении вправо, но и позволяет установить ее в требующемся месте валика 7 вдоль его образующей, что зависит от величины хода толкателя 6.
Вибратор 14 перемещается толкателем 4 дальше до тех пор, пока не остановится шток 2. Перемещение вибратора 14 выбирается таким, чтобы торец стержня 17 оказался правее крайней правой пластины лотка 24. Когда стержень 17 окажется справа от лотка 24, упор 29 входит в контакт с рычагом 27 и начинает поворачивать рычаг 27, который в свою очередь через тягу 26 1поворачивает лоток 24. Пластины лотка 24, поворачиваясь, проходят мимо упора-вилки 19 и призмы 22, подхватывают собранный узел и выносят его из зоны сборки. Собранный узел поступает либо на следующую операцию, либо в приемник-накопитель (на чертеже не покаван).
Когда собранный узел удален, щток 2 и траверса 5 начинают обратное движение влево. ПружИНа 18 отводит лоток 24 в прежнее положение до упора 20. Толкатели 4, 5 и 6 также перемещаются влево. Поэтому толка1тель 6 освобождает в призме 25 место под следующий валик. Вибратор 14 под действием пружин 12 движется в исходное положение влево до упора 13 по направляющим 16.
Ролик 8 выходит на скос ползуна 9, который под действием пружины // отходит назад, в крайнее заднее положение. Когда ползун 9 OTo;i;ieT навад, призма 22, двигаясь вместе с «им, окажется под лотком 31 (см. фиг. 2), и в нее западает очередная втулка 21. Пласти.на 10, перемещаясь «азад вместе с ползуном 9, освобождает место под призмой 25, в которую западает из лотка 30 очередной валик 7.
На этом цикл работы автомата заканчивается, Начинается новый цикл. Шток 2 опять идет вперед, толкатель 5 через ролик 8 перемещает ползун 9 вперед. В призме находится одна нижняя втулка 21, остальные отсекаются ползуном 9 и остаются в лотке 31. Пластина 10, двигаясь вперед, отсекает нижний валик 7 в Приэме 25 от верхних и лрижпмает его к призме 25. Затем валик 7 под действием толкателя 6 движется вправо. Далее цикл повторяется.
Еслн стержень 17 выполнить не цилиндрическим, .как это показано на фиг. 1, а коничеоким, то втулка 21 на таком стержяе сразу описывает своей асью конус, больщим своим основанием обращенный к вали-ку 7. Поэтому за1ход втулки 21 на валик 7 с такого стержня происходит п още, быстрее и легче. Установлено, что наиболее подходит стер 5 В 7 8 910 Л
жень, конусность которого в пределах 6-12°. Время, затрачиваемое на сборку, не более 0,3-0,4 сек.
Предмет изобретения
1.Автомат для сборки деталей типа валиквтулка, содержащий станину, механизм управления и взаимодействующий с ним исполнительный механизм, включающий в себя призму для базирования втулки, лотки для подачи и съема деталей, бункерные загрузочные устройства и вибратор с якорем, отличающийся тем, что, с целью повыщения производительности и надежности автомата , на станине размещены продольные направляющие, на которых установлен вибратор с вибрирующим стержнем, жестко закрепленным на якоре вибратора; призма установлена с возможностью возвратно-поступательного перемещения перепенднкулярно направляющим; лоток для съема деталей установлен с возможностью возвратно-качательного движения вокруг оси, параллельной направляющим, а механизм управления выполнен в виде рабочего цилиндра, щток которого жестко связан с траверсой, несущей три толкателя, один из которых служит для установки втулки Hai стержень вибратора, второй - для пе11емещения призмы и третий - для отвода вибратора с сборки.
2.Автомлт по п. 1, отличающийся тем, что вибрирующий стержень выполнен в виде усеченного конуса с углом конусности в пределах 6-12°, верщина которого расположена со стороны призмы. 13 74 /5 /
е -Е
//77/777/777
Фиг.
ж-ж
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки деталей типа валик-втулка | 1976 |
|
SU657950A2 |
| Автомат для сверления поперечных отверстий | 1981 |
|
SU1007852A1 |
| Роторный автомат для сборки узла,состоящего из ролика и втулки | 1981 |
|
SU965705A1 |
| Устройство для установки базовой детали в спутник автоматической линии сборки | 1983 |
|
SU1087299A1 |
| Сборочный агрегат | 1979 |
|
SU872177A1 |
| Устройство для сборки узлов типа "вал-втулка | 1978 |
|
SU766814A1 |
| Автомат для обработки и контроля деталей | 1988 |
|
SU1609539A1 |
| Устройство для сборки комплектов деталей | 1972 |
|
SU443739A1 |
| Устройство для обработки витых траверсных сеток радиоламп | 1968 |
|
SU293516A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |