1
Изобретение относится к области автоматического контроля и учета работы одноковшовых экскаваторов.
Устройства для контроля положения ковша экскаватора-драглайна в пространстве известны.
Однако они не обеспечивают достаточной точности контроля положения ковша в области Пространства, ограниченной дугами Окружностей с .центрами в точках схода тягового и подъемного канатов с соответствующих направляющих шкивов. Это при1водит к повыш.енной погрешности -при определении веса движущегося ковша.
Для повышения точ)ности -контроля в предложенном устройстве датчики длин подъемного и тягового канатов выполнены импульсными и к «х выходам соответственно подключены реверсивные счетные схемы, выходы которых через дешифраторы соединены со входами логической схемы «И.
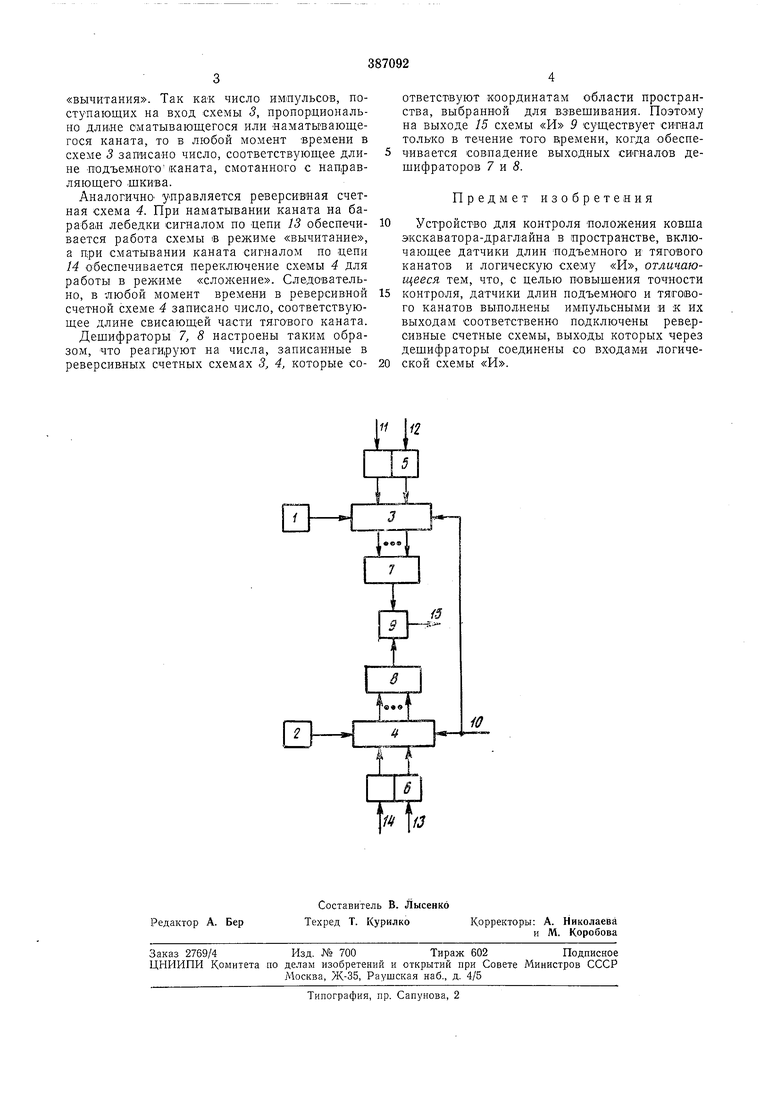
На чертеже приведена функциональная схема устройства для контроля положения ковша экскаватора-драглайна в пространстве.
Импульсные датчики 1 И 2 длин подъемного и тягового канатов сочленены с соответствующими канатами или с механизмами намотки, а их выходные сигналы представлены в виде импульсов, число которых пропорционально контролируемой длине каната. Ёыходы датчиков 1, 2 связаны с соответствующими реверсивными счетными схемами 3, 4, триггеры 5, 6 управления режимом работы которых соединены с коммутирующими элементами схемы управления приводами экскаватора, обеспечивающими формирование соответствующих сигналов при прямом и обратном вращении барабанов подъемной и тяговой лебедок. Выходы реверсивных счетных схем 5, 4
через дешифраторы 7, 8 соединены с входами схемы «И 9.
Устройство работает следующим образом. Перед началом экскавации ковш поднимают на высоту до сра батывания соответствующего
концевого -выключателя. В этот момент вручную (ИЛИ автоматически) по -цепи 10 реверсивные счетные схемы 5 и 4 приводятся в нулево-е состояние. Затем аналогичную операцию вьтолняют с тяговым канатом, т. е. подтягивают -ковш до срабатывания соответствующего концевого выключателя и приводят в нулевое состояние реверсивную счетную схему 4. В схеме 3 запишется число, пропорциональное дли-не смотанной «части подъемного каната, так как при опускании ковша в забой реверсивная счетная схема 3 по цепи 11 переключается в режим «сложения и импульсы, поступающие на ее вход, суммируются. При подъеме ковша реверсивная счетная
схема 3 по цепи 12 переключается в рел-сим
«вычитания. Так как число импульсов, поступающих на вход схемы 3, пропорционально дли,не сматывающегося или «аматьгвающегося каната, то в любой момент времени в схеме 3 записано число, соответствующее длине подъемного каната, смотанного с направляющего шкива.
Аналогично управляется реверсивная счетная схема 4. При наматывании каната на барабан лебедки сигналом по цепи 13 обеспечиБается работа схемы в режиме «вычитание, а при сматывании каната сигналом по цепи 14 обеспечивается переключение схемы 4 для работы в режиме «сложение. Следовательно, в -любой момент времени в реверсивной счетной схеме 4 записано число, соответствующее длине свисающ ей части тягового каната.
Дещифраторы 7, 8 настроены таким образом, что реагируют на числа, записанные в реверсивных счетных схемах 3, 4, которые соответствуют координатам области пространства, выбранной для взвешивания. Поэтому на выходе 15 схемы «И 9 существует сигнал только в течение того В(ремени, когда обеспечивается совпадение выходных сигналов дешифраторов 7 и S.
Предмет изобретеиия
Устройство для контроля ноложения ковша зкскаватора-драгл айна в пространстве, включающее датчики длин подъемного и тягового канатов и логическую схему «И, отличающееся тем, что, с целью повышения точности контроля, датчики длин подъемного и тягового канатов выполнены импульсными и к их выходам соответственно подключены реверсивные счетные схемы, выходы которых через дешифраторы соединены со входами логической схемы «И.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения веса ковша экскаватора-драглайна | 1976 |
|
SU662820A1 |
| Устройство для измерения работы экскаватора-драглайна | 1976 |
|
SU634232A1 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| Способ измерения количества работы выполненной экскаватором-драглайном | 1982 |
|
SU1097765A1 |
| Устройство защиты стрелы драглайна | 1973 |
|
SU537168A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1984 |
|
SU1219754A1 |
| Устройство для контроля работы экскаватора-драглайна | 1976 |
|
SU643597A1 |
| УСТРОЙСТВО КОНТРОЛЯ и УЧЕТА РАБОТЫ ДРАГЛАЙНА | 1972 |
|
SU339904A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОВША ОТНОСИТЕЛЬНО СТРЕЛЫ И БЛОКОВДРАГЛАЙНА | 1967 |
|
SU195077A1 |
12
