1
Изобретение относится к области автоматического управления и может быть использовано при динамическом согласовании структуры следящей системы высокого порядка астатизма с нестационарным входным сигналом.
Известны способы формирования управляющего воздействия, основанные на выделении, и интегрировании сигнала ошибки системы.
При реализации известных способов и представлении отслеживаемого сигнала в виде
т . t /.(/) SA/i
t
где i-t - t-я производная функции / (t); т - число членов ряда Тейлора, аппроксимирующих закон изменения сигнала А(t) на интервале Т.
Оптимальная следящая система должна иметь астатизм (т+)-то порядка.
Однако практически никогда не известно необходимое число членов ряда т, которое нужно учитывать для реализации следящей систе.мы, поскольку при воздействии нес1ационарного сигнала, имеющего различные законы изменения на различных интервалах времени, число членов ряда т должно быть разным, так как дисперсия ошибки выделяемого
сигнала из помех со спектральной плотностью NO равна
„,„. ., 2т-f 1 0(7)
Реализация известных способов формирования управляющего воздействия в этих условиях не обеспечивает достаточной точности управления.
Цель изобретения - повышение точности управления.
Это достигается тем, что непрерывно выделяют низкочастотные составляющие всех вплоть до (-1)-го интегралов сигнала ошибки, сравнивают выделенные сигналы с пороговыми уровнями и результаты сравнения в виде двоичных сигналов используют для перестройки структуры системы.
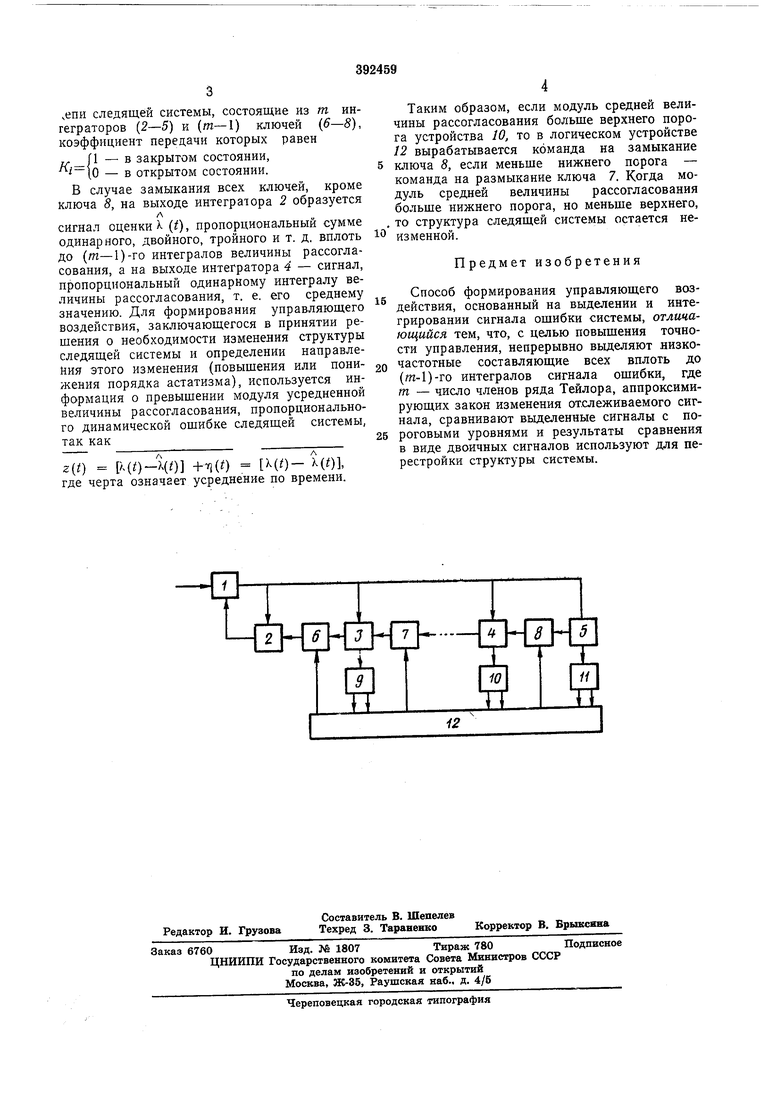
Па чертеже показана блок-схема следящей системы высокого порядка астатизма, поясняющая предлагаемый способ.
Она содержит дискриминатор /, интеграторы 2-5, ключи 6,7 VI 8, пороговые устройства 9, 10 11 VI логическое устройство 12. Входной сигнал )(t) с помехой TI (t) поступает на дискриминатор /, куда одновременно подается сигнал оценки i- (t).
Выходной сигнал дискриминатора 2(0, пропорциональный величине рассогласования (0- (01, поступает в сглаживающие
,епи следящей системы, состоящие из т интеграторов (2-5) и (т-1) ключей (6-8), коэффициент передачи которых равен ,у.1 - в закрытом состоянии, 10 - в открытом состоянии. В случае замыкания всех ключей, кроме ключа S, на выходе интегратора 2 образуется
л
сигнал оценки X (t), пропорциональный сумме одинарного, двойного, тройного и т. д. вплоть до (т-1)-го интегралов величины рассогласования, а на выходе интегратора 4 - сигнал, пропорциональный одинарному интегралу величины рассогласования, т. е. его среднему значению. Для формирования управляющего воздействия, заключающегося в принятии рещения о необходимости изменения структуры следящей системы и определении направления этого изменения (повышения или понижения порядка астатизма), используется информация о превышении модуля усредненной величины рассогласования, пропорционального динамической ошибке следящей системы, так как
2(0 40-40 +(0 МО- 40L
где черта означает усреднение по времени.
Таким образом, если модуль средней величины рассогласования больще верхнего порога устройства 10, то в логическом устройстве 12 вырабатывается команда на замыкание ключа 8, если меньше нижнего порога - команда на размыкание ключа 7. Когда модуль средней величины рассогласования больше нижнего порога, но меньше верхнего, то структура следящей системы остается неизменной.
Предмет изобретения
Способ формирования управляющего воздействия, основанный на выделении и интегрировании сигнала ошибки системы, отличающийся тем, что, с целью повышения точности управления, непрерывно вьщеляют низкочастотные составляющие всех вплоть до (m-l)-ro интегралов сигнала ощибки, где т - число членов ряда Тейлора, аппроксимирующих закон изменения отслеживаемого сигнала, сравнивают выделенные сигналы с пороговыми уровнями и результаты сравнения в виде двоичных сигналов используют для перестройки структуры системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| А. Д. ПОДЛИННОЕ и Е. С. Заводий, ^^-о:з^;/пя !->& плтгип'з-^; ГН;^;:;;!^---"- 1 Б:;5л;а;:- | 1972 |
|
SU328430A1 |
| ЦИФРОВАЯ ДИНАМИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1969 |
|
SU244464A1 |
| Следящая система | 1975 |
|
SU550617A1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ | 1995 |
|
RU2103715C1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| Цифровая динамическая следящая система | 1980 |
|
SU924667A2 |
| Устройство для фазовой автоподстройки частоты | 1978 |
|
SU698115A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Следящий привод | 1979 |
|
SU794611A1 |
| Следящая система | 1985 |
|
SU1290251A1 |
