1
Изобретение относится к упаковочному оборудованию и может быть использовано для обвязки штучных изделий, например упорных ш ар и к оп о д ш ип в ико в.
Известен автоМат для обвязки штучных изделий, ,содержащий механизм для подачи и правки связывающего материала, режущий ипструмепт, питатель и обвязочный механизм.
Цель изобретения - ловыщение надежности в работе, а также производительности автомата и улучщение качества обвязки.
Для этого обвязочиый механизм выполнен в виде блока с пуансонами для загибания связывающего материала, .например проволоки. Иа одном блоке установлен режущий инструмент, а питатель имеет нрорезь, иодвижиую заслонку, щи.бер с гнездом для перемещения изделия из питателя в зону обвязки и из нее и козырек для предохранения от выброса .изделия из гнезда щибера.
Авто.мат снабжен та-кже механизмом для регулировки длины проволоки, состоящим из шкалы и ралЖИ с ходовым винто.м и ползуном, на котором укреплены стрелка и опора.
На ф.иг. 1 изображен предлагаемый автомат, общий вид; на фиг. 2 - его кинематическая схема; на .фиг. 3 и 4 - обвязочный механизм; на фиг. 5 - механизм для подачи проволоки; на фиг. 6 и 7 - механизм для правки
проволоки в двух нроекцнях; на ф.иг. 8 и 9 - устройство для зажима проволоки в двух проекциях; на фиг. 10 - питатель в двух проекциях; на фиг. 11-механизм для регулировки
длины проволоки; на фиг. 12 - катущка для проволоки.
Автомат содержит катушку для .нр0(волоки, механизм для правки проволоки, механизм для подачи проволоки, обвязочный механизм,
режущий инструмент, устройство для зажима нроволоки, механизм для регулировки длины нроволоки, привод, станину и питатель.
Станина имеет вп.д коробчатой формы и содержит раму 1, верхнюю 2 и нижнюю 3 .плиты. Все механнзмы и устройства автомата смонтированы на верхней плите 2, кроме привода, который установлен на нижней плите 3. Обвязочный механизм включает в себя блок, в котором свободно перемещаются пять
пуансонов 4-8, причем все пуансоны приводятся в возвратно-постунательное движение от рычажно-кулачковых механизмов привода. Подпружиненный пуансон 4 для отрезки, первого загиба н подгиба проволоки 9 перемещается в вертикальном направлении. Пуансоны 5 и 6 для второго и третьего загибов проволоки перемещаются в горизонтальной плоскости под углом примерно 8-10° к .подаче проволоки 9. Пуансон 7 для четвертого загиба
нроволоки перемещается в горизонтальной
плоскости, (переендикулярио подаче спроволоки 9. Подпружиненный пуансон 8 для пятого загиба пр0:волоки пере мещается в вертикальном налравлеиии. На луансоне 4 закреплен режущий инструмент, .содержащий нож 10, а на верхней нлите 2 режущий инструмент, включающий нож 11. Обвязочный механизм имеет также ловлтель 12 для направления конца лроволоки.
Механизм для подачи проволоки состоит из ползуна 13, .приводимого в возвратно-поступательное движение рычажно-кулачковЫМ механизмом привода, с закрепленным на нем ynoipOM и щтангой 14. На последней установлена опора 15 и иодвижно смонтирован подпружиненный поворотный сектор 16 с насечкой.
Механизм для правки проволоки состоит из рамки 17, на которой расположены пять роликов 18 и четыре подвижных ползуна 19 с роликами 20. Ползуны 19 регулируются гайками 21 и фиксируются в необходимом положении винтами 22.
Устройство для зажима проволоки выполнено в в.иде подпружиненного двуплечего рычага 23, на ОДН01М .конце 1котор.ого смонтирован регулировочный винт 24, а на другом закреплена опора 25, которая «взаимодействует с опорой 26, зажимает или освобождает проволоку 9.
Катушка для .проволоки с горизонтальной осью вращения состоит из кр.оащтейна 27, вращающегося в нем стержня 28. На стержне 28 закреплена катущка 29. На кронщтейне 27 смонтирован тормоз 30, предназначенный для торможения катушки 29 П1ри сматывании с нее проволоки.
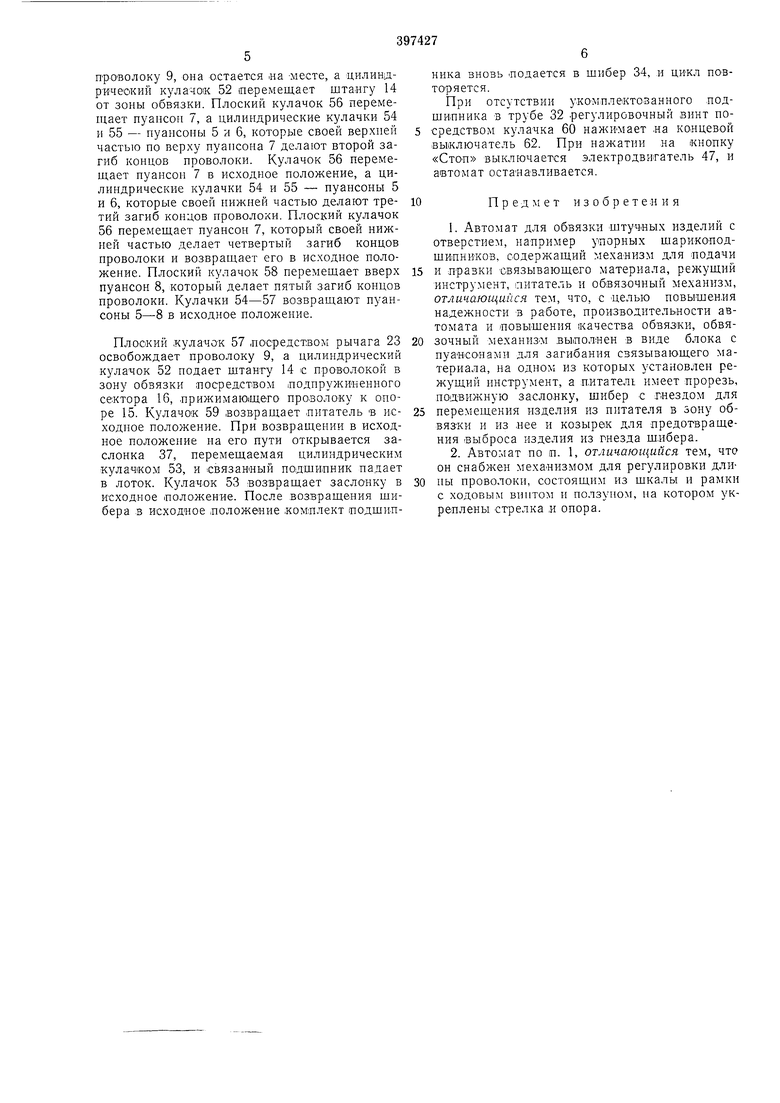
Питатель включает в себя кронщтейн 31, на котором закреплена труба 32, предназначенная для загрузки укомплектованных подшипников. На кронштерше 31 установлен козырек 33, служащий для предотвращения выброса подшипников из гнезда шибера 34, закрепленного на ползуне 35, который перемещается в направляющих 36. Заслонка 37 закреплена на нолзуне 38, который перемешается IB направляющих 39.
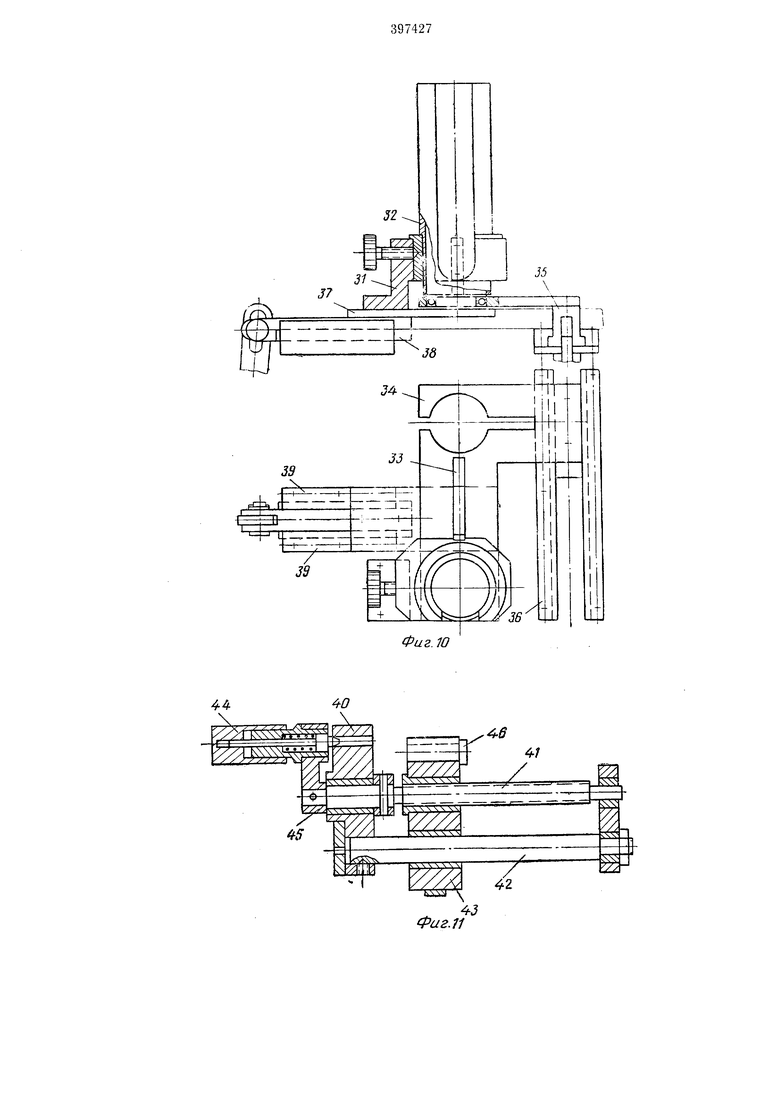
Механизм для регулировки длины проволоки выполнен в виде рамки 40, на которой смонтирован ходовой винт 41 и направляющий стерже.нь 42, по которому перемещается ползун 43. На ползуне 43 з.акреплена стрелка, устанавливаемая на определенное деление щкалы с помощью рукоятки 44, соединенной с ходовым винтом 41 посредством плеча 45. На ползуне 43 закреплена Огпора 46, взаимодействующая с механизмом для подачи проволоки.
Привод включает в себя электродвигатель 47, клино-ременную передачу 48, редуктор 49, предохранительную муфту 50, распределительный вал 51 со смонтированными на нем профилированными кулачками и систему рычагов. На распределительном валу 51 расположены кулачок 52 для перемещения штанги
14, кулачок 53 для перемещения заслонки 37, кулачок 54 для перемещения пуансона 5, кулачок 55 для перемещения пуансона 6, кулачок 56 для перемещения пуансона 7, кулачок
57 для перемещения пуансона 4 ,и рычага 23, кулачок 58 для перемешения пуансона 8, кулачок 59 для перемещения щибера 34, кулачок 60 для выключения электродвигателя 47 при отсутствии укоМплектованных подщипниKoiB в трубе 32 питателя.
Автомат выполнен переналаживаемым .для разных типов упорных шарикоподшипников. На автомате установлена кнопочная станция с кнопкам.и «Пуск и «Стоп.
Партию укомплектованных подши пников загружают в трубу 32 питателя. Предварительно проволоку 9 перематывают с бунта на катушку 29. Конец проволоки с катушки огибают около направляющего ролика 61, заправляют в механизм для правки проволоки, затем проволоку протаскивают между опорой
15и подпружиненным поворотным сектором
16-механизма для подачи проволо.ки, вставляют в отверстие ножа 11 и протаскивают в зону обвязки, регулируя при этом ползун 19 механизма для правки проволоки до получения прямой проволоки. Конец проволоки вставляют в ловитель 12 механизма для обвязки шарикоподшипников. Затем нажимают
на кнопку «Пуск (включается автоматическиГ| цикл работы). Распределительный вал 51 получает вращение от электродвигателя 47 через клиноременную передачу 48, редуктор 49 и предохранительную муфту 50.
Автомат выполняет пять операций. Сначала отрезается проволока, первый загиб концов проволоки вверх около наружного диаметра подшипника и подгиб проволоки примерно на толщину проволоки по внутреннему диаметру
подщипника пуансоном 4, затем второй загиб концов проволоки навстречу концами на расстоянии полуразности наружного и внутреннего диаметров, параллельно горизонтальной плоскости и, кроме того, под углом к продольной подаче проволоки с помощью пуансона 7 и верхних частей пуансонов 5 и 6. После этого осуществляется третий загиб концов проволоки навстречу концам.и вблизи верха подщипника а.налогично предыдущему, но
нижними частями пуансонов 5 и 6, потом четвертый загиб концов проволоки под перемычкой и перпендикулярно ей пуансоном 7 и затем .последний, пятый, загиб концов проволоки .вверх с другой стороны перемычки пуансоном 8.
Перемещения рабочих органов автомата посредством кулачков нроисходит в следующей последовательности.
Плоский .кулачок 59 перемещает шибер с
укомплектова.нным подшипииком от трубы 32 питателя в зону обвязки.
Плоский кулачок 57 перемещает пуансон 4 вверх, который отрезает заготовку проволоки 9, делает первый загиб и подг.иб проволоки,
а также посредством пычяга 23 зажимает
проволоку 9, она остается иа месте, а цилиндрКЧеокий кулачок 52 перемещает штангу 14 от зоны обвязки. Плоский кулачок 56 перемещает пуансоп 7, а цилиндрические кулачки 54 и 55 - пуансоны 5 и 6, которые своей верхней частью по верху пуапсона 7 делают второй загиб концов проволоки. Кулачок 56 перемещает пуансон 7 в исходное положение, а цилиндрические кулачки 54 и 55 - пуансоны 5 и 6, которые своей нижней частью делают третий загиб концов проволоки. Плоский кулачок 56 перемещает пуансон 7, который своей нижней частью делает четвертый загиб концов проволоки и возвращает его в исходное положение. Плоский кулачок 58 перемещает вверх пуансон 8, который делает пятый загиб концов проволоки. Кулачки 54-57 возвращают пуансоны 5-8 в исходное положение.
Плоский кулачок 57 .посредством рычага 23 освобождает проволоку 9, а цилиндрический кулачок 52 подает штангу 14 ic проволокой в зону обвязки посредством лодпружикенного сектора 16, прижимающего проволоку к опоре 15. Кулачок 59 возвращает -питатель в исходное положение. При возвращении в исходное положение на его пути открывается заслонка 37, перемещаемая цилиндрическим кулачком 53, и связаниый подщи.пник падает в лоток. Кулачок 53 возвращает заслояку в исходное положение. После возвращения щибера в исходное лоложеиие комплект подщипника вновь подается в шнбер 34, и цикл повторяется.
При отсутствии укомплектованного подщипника в трубе 32 регулировочный винт посредством кулачка 60 нажимает на концевой выключатель 62. При нажатии на кнопку «Стоп выключается электродвигатель 47, и автомат останавливается.
10
Предмет изобретения
1.Автомат для обвязки штучных изделий с отверстием, например упорных щарикоподщинников, содержащий механизм для подачи
и правки связывающего материала, режущий инструмент, питатель и обвязочный механизм, отличающийся тем, что, с целью повышения надежности в работе, производительности автомата и повыщения качества обвязки, обвязочный механиЗМ выполнен в виде блока с пуансопамн для загибания связывающего материала, на одном из которых установлен режущий инструмент, а питатель имеет прорезь, подвижную заслонку, щибер с гнездом для
перемещения изделия из питателя в зону обвязки и из нее и козырек для предотвращения выброса изделия из гнезда щдбера.
2.Автомат по п. 1, отличающийся тем, что он снабжен механизмом для регулировки длипы проволоки, состоящим из щкалы и рамки с ходовым винтом и ползуном, на котором укреплены стрелка и опора.
Й/г /

| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления гнутых изделий из проволоки | 1980 |
|
SU906637A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН с ДВУМЯ ВЕТВЯМИ ПРОТИВОПОЛОЖНОГО НАПРАВЛЕНИЯ | 1971 |
|
SU424644A1 |
| Автомат для изготовления деталей из проволоки | 1972 |
|
SU444592A1 |
| Устройство для изготовления изпРОВОлОКи издЕлий ТипА булАВОК | 1979 |
|
SU797831A1 |
| Автомат для рубки и чеканки штыря линейного разъема из проволоки | 1979 |
|
SU895586A1 |
| Автомат для изготовления деталей из проволоки | 1991 |
|
SU1787630A1 |
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU534286A1 |
| Сварочный автомат | 1956 |
|
SU107457A1 |
| Автомат для изготовления волнистых пружинных шайб | 1977 |
|
SU657896A1 |
| Устройство для вырубки деталей, пробивки отверстий и установки в них стержневых деталей | 1976 |
|
SU606661A1 |




iiuu U S г/г. f -Лл/Ц . . J
Л
/л//
Фиг. Ю
26
iXJ
Г7-7 7 t7 7 7 7 T IМ
iX.;,/Z 2S|--|p g,.3:c
Фиг. 12
