(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОЧУВСТВЛЕННЫМ ДИСТАНЦИОННЫМ КОПИРУЮЩИМ МАНИПУЛЯТОРОМ
1
Изобретение относится к робототехнике и может быть использовано при создании очувствленных дистанционных копирукяцих манипуляторов.
Известны устройства для управле- 5 НИН очувствленным дистанционным копирующим манипулятором, например, устройство 1 , содержащее исполнительный орган, задающий орган, приводы суставов задакндего и исполнительного 10 органов, датчики положений в суставах задающего и исполнительного органов, датчики моментов в суставах задающего органа, вычислительный блок, шестистепенной датчик усилия и момен- 5 тон, соединяющий исполнительный орган с основанием.
Такое устройство имеет невысокую точность передачи сил и моментов от объекта манипулирования к оператору. 20
Наиболее близким техническим решением к изобретению является устройство Г2Т, содержащее исполнительный орган, установленный между с.хватом и смежным ему суставом задающего ор- 25 гана, первый шестистепенной датчик усилий и моментов, выход которого подключен к первому входу вычислительного блока, со вторыми входами котоj)oro соединены выходы датчиков поло- ЗО
жения суставов задающего органа и первые входы приводов соответствующих суставов Зсщающего органа, вторые входы которых подключены к выходам датчиков положения одноименных суставов исполнительного органа/ а выходы вычислительного блока соединены с первыми входами приводов соответствующих суставов исполнительного органа, со вторыми входами которых соединены выходы датчиков момента тех же суставов.
Недостатком этого устройства является его невысокая точность передачи сил и моментов от объекта манипулирования к оператору и обратно/ вследствие наличия в сигналах датчиков момента суставов исполнительного органа составляющих от веса звеньев исполнительного органа.
Цель изобретения - повышение точ,ности устройства.
Поставленная цель достигается тем, что устройство содержит установленный между основанием и задающим органом второй шестистепенной датчик усилий и моментов, выход которого соединен с трет-йим входом вычислительного блока.
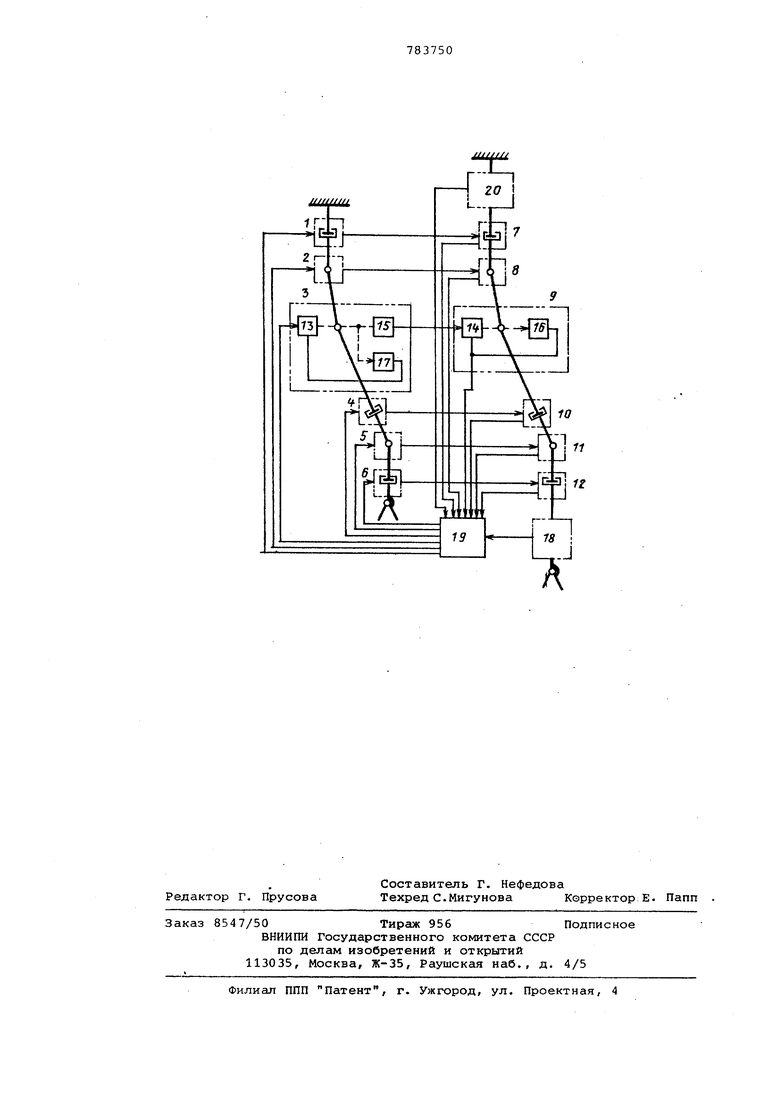
На чертеже представлена функционёшьная схема устройства Устройство содержит суставы 1-6 испалнительного органа,суставы 7-12 задающего органа, приводы 13 суставов исполнительного органа, прив.оды 14суставов задающего органа, датчики 15положения суставов исполнительного органа, датчики 16 положения суставов задаквдего органа, датчики 17 момента суставов исполнительного органа, первый шестистепенной датчик 18 усилий и моментов, вычислительный блок 19, второй шестистепенной датчик 20 усилий и моментов. Устройство работает следующим образом. Усилия, создаваемые оператором на задающем органе относительно основания, измеряются шестистепенным датчиком 18 усилий и MOMeHTOBv Те же усилия в сумме с усилиями от веса звеньев (и приводов, и суставов) задающего органа измеряются шестистепенным датчиком 20 усилий и моментов. Сигналы с датчиков 20 и 18.поступа ют в вычислительный блок 19. Разности их одноименных составляющих, пропорциональные усилиям от веса звеньев, преобразуются в вычислительном блоке 19 в соответствии с кинематикой задающего и исполнительного органа в компенсирующие сигналы приводов исполнительного органа, которые сравниваю сд с сигналами датчиков 17 моментов суставов исполнительного органа, содержащих сигналы от веса звеньев(приводов и суставов) исполнительного органа, и отрабатываются приводами, создавая моменты и усилия, уравновеши вающие веса и моменты от звеньев исполнительного органа. Сигналы с датчика 18, пропорциональные только усилиям оператора, пре образуются в вычислительном блоке 19 в управляющие сигналы приводов суставов исполнительного органа и подаются на суммирующие входы приводов 13 исполнительного органа. Таким образом, приводы 13 суставо исполнительного органа, отрабатывая поступающие на их входы сигналы, кро ме усилий и моментов, пропорциональных весам звеньев задающего органа, создают между исполнительным органом и объектом манипулирования усили пропорциональные усилиям между задаю щим органом и оператором. Под действием усилий приводов, веса звеньев и усилий со стороны . объекта манипулирования изменяется поло жение звеньев исполнительного ор гана, которое измеряется датчиками положений суставов исйолнительного ор гана. Сигналы с датчиков положений 1 уставов 1-6 исполнительного органа сравниваются с сигналами датчиков 16 положений соответствукнцих суставам 7-12 задающего органа, и отрабатываются приводами 14 суставов задающего органа. Таким образом, манипулятор передает усилия и положения в обе стороны: от оператора к объекту манипулирования и от объекта манипулирования к оператору . При использовании изобретения увеличивается точность передачи усилия за счет того, что сигналы от веса звеньев задающего органа, полученные в вычислительном блоке из сигналов датчиков 20 и 18 компенсируются сигналами приводов исполнительного органа при их отработке, а моменты, созданные приводами исполнительного органа уравновешивают при этом моменты от веса звеньев исполнительного органа. Формула изобретения стройство для управления очувствленным дистанционным копирующим манипулятором, содержащее исполнительный орган, установленный между схватом и смежным ему суставом задающего органа, первый шестистепеннной датчик усилий и моментов, выход которого подключен к первому входу вычислительного блока, со вторыми входами которого соединены выходы датчиков положения суставов задающего органа и первые входы приводов соответствующих суставов задающего органа, вторые входы которых подключены к выходам датчиков положения одноименных суставов исполнительного органа, а выходы вычислительного блока соединены с первыми входами приводов соответствующих суставов исполнительного органа, со вторыми входами которых соединены выходы датчиков момента тех же суставов, отличающее с я тем, что, с целью повышения точности устройства, оно содержит установленный между основанием и задающим органом второй шестистепенной датчик усилий и моментов, выход которого соединен с третьим входом вычислительного блока. Источники информации, принятые во внимание при зкспертизе 1.Авторское свидетельство СССР 481418, кл. В 25 Л 3/14, 1973. 2.Авторское свидетельство СССР №501864, кл. B25CI 3/04, 1973 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Устройство для управления манипу-ляТОРОМ | 1979 |
|
SU830292A1 |
| Устройство для управления очувствленнымМАНипуляТОРОМ | 1979 |
|
SU824130A1 |
| Система управления суставом очувствленного манипулятора | 1978 |
|
SU748341A1 |
| Устройство для управления звеном очувствленного манипулятора | 1974 |
|
SU517483A1 |
| Очувствленный дистанционный копирующий манипулятор | 1973 |
|
SU501864A1 |
| Очувствленный дистанционный копирующий манипулятор | 1973 |
|
SU481418A1 |
| Устройство для управления суставом очувствленного дистанционного копирующего манипулятора | 1974 |
|
SU559820A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |