Мзобретепис отиосится к области обработки металлов дгпзлсинем.
Известен гидравлически привод к ирессу, содержаш,и1 цмлиидр подвода инструмента с:) штоком и корпусом, а также соосио распеложеиный с ним рабочш цилиидр с иоргпием л яажимиое устройство. В таком приводе невозможно нол}чпть рабочее усилие в любой точкс .кода цилиндра подвода, последовательност: г.к.почения и выключения его рабочнх полостей сложна.
С це.лыо устранения указанных недостатке 1 описываемом приводе корпус цилиндра подвода инструмепта установлен с БОЗ ГОЖНОСТЫО осевого перемещения внутрп штока рабочего цплипдра, выполпенпого полым, а зажпмное устройство выполнено в виде конусных губок, расположенных между корпусом цилиндр л подвода н 1ПТОКОМ рабочего цилиндра, обращенных конусной поверхностью к штоку рабочего цилиндра, имеющего соответствующие скосы, а рабочей к корпусу цплнндра нодвода н скрепленных через промежуточную планку .: опорным элементом, размещенны л на щтоке цилнндра нодвода по его осп н связанным с поршнем рабочего цплппдра посредством распорной пружины.
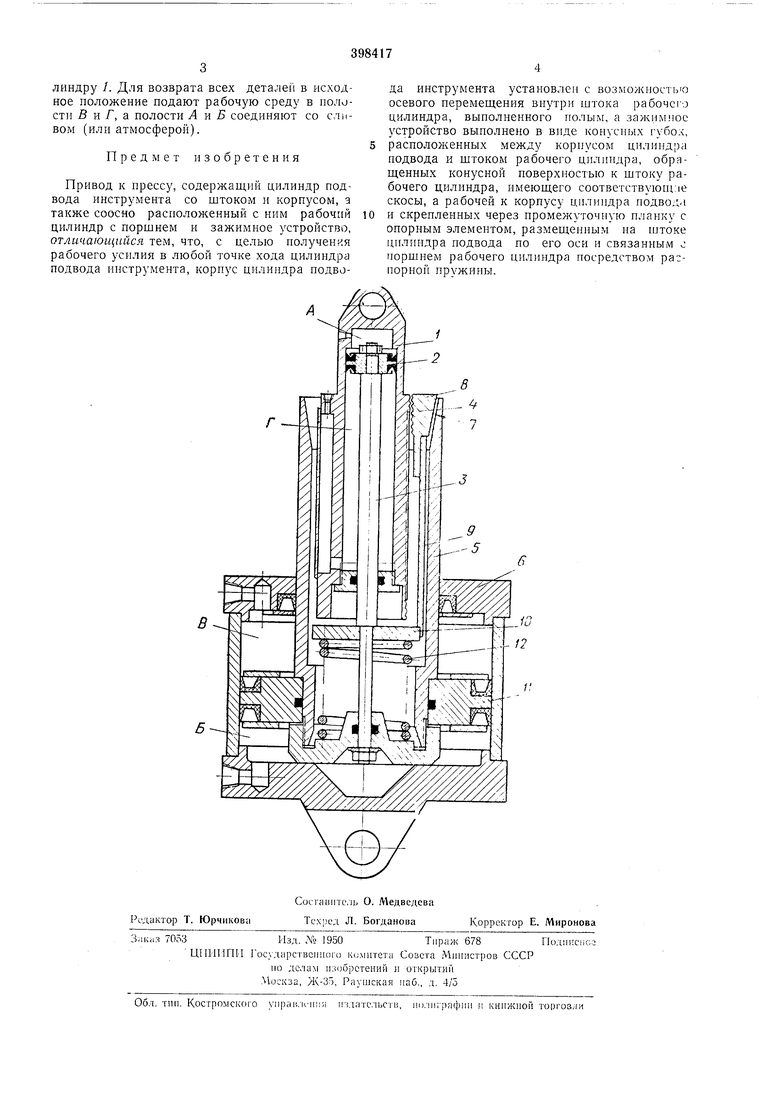
На чертеже изображен предлагаемый пр;;вод. Он содержит цилиндр / подвода инструмепта с поршнем 2 н щтоком 3. Корпус цплиндг,а имеет зубья - п установлен внутри штока 5 рабочего цилиндра 6, имеющего скосы 7. Зажнмпое устройство выполнено в виде конусных губок 8, расположенных между корпусом цилнндра подвода н щтоком рабочего цилиндра п скрепленных через промел уточную планку 9 с опорным элементом W. размещенным на штоке цплппдра нодвода и связанным с поршнем // рабочего цилиндра посредством распорной пружины 12.
Привод работает следующим образом.
В полость А по.гают под давлением рабочую .рсду, которая перемещает цилиндр 7, выполняющий роль ипока привода. Порп1ень 2 при зтом не двигается, так как усплие давлення, воздейств}ющее на него со стороны рабоче v-реды, еще недостаточно для нреодоленпя сопротивления пружины 12. После встречи чилнндра / с сонротивленнем, большнм чем усн.-ще первой (меньшей) ступени, начинает перемещаться поршень 2 со щтоком 3, который, сжимая пружину 12, перемещает опорный элемент 10 II промежуточную планку 9. После это губки 8 зажима, входя в скосы 7. сходятся, i их зубья зацепляются с зубьями 4 цилиндра У. Теперь, не прекращая подачи рабочей среды в полость А, подают ее в полость Б ц;;линдра 6. Под действием давления рабочо. :реды порщень // через щток 5 и губки 8 передает усплие второй (рабочей) стунени ци
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1982 |
|
SU1024270A1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ОПОРА | 1971 |
|
SU310777A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Устройство для удаления труб из трубных досок | 1985 |
|
SU1295138A1 |
| Устройство для подачи листового материала в рабочую зону пресса | 1979 |
|
SU871934A1 |
| Устройство для отделения полосового материала от стопы | 1985 |
|
SU1378993A1 |
| Переналаживаемый кондуктор | 1986 |
|
SU1388198A1 |
| МНОГОДОЗОВЫЙ БЕЗЫГОЛЬНЫЙ «НЪЕКТОР | 1969 |
|
SU257697A1 |
| Устройство для вставки уплотнительных шайб в подшипник | 1987 |
|
SU1481523A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
