1
Известны подъемные механизмы для вертикального судоподъемника, содержащие гидроцилиндр, рычаги и зубчатые штанги, у которых механизм выполнен из гидравлических подъемных устройств, поперечных балок, платформы, опорных колонн, направляющих башен и гидроэлектрической системы. Однако такое выполнение механизма препятствует поперечной выкатке судов или создает значительные потери вре.мени на холостое опускание и подъем зубчатых щтанг.
Цель изобретения - сокращение длительности цикла подъема и спуска судна, а также расположение подъемного механизма ниже уровня стапельной площадки.
Для этой цели гидроцилиндр соединен при помощи разноплечих рычагов с зубчатыми штангами.
Штанги перемещаются возвратно-поступательно и имеют возможность поворачиваться вокруг вертикальных осей под действием вспомогательных гидроцилиндров, щтоки которых связаны со щтангами посредством рычагов с кольцами, охватывающими щтанги.
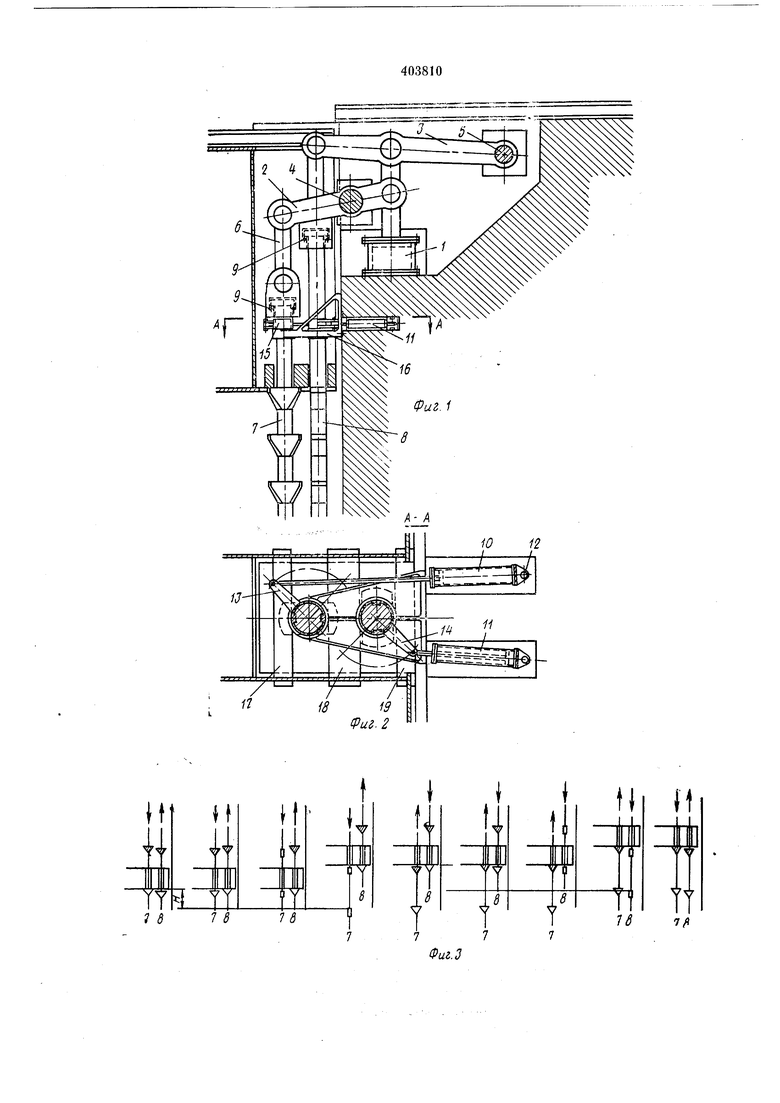
На фиг. 1 показан предлагаемый подъемный механизм, вид сбоку; на фиг. 2 - устройство разворота зубчатых щтанг, в плане; на фиг. 3 - схема работы подъемного механизма.
На щтоке гидроцилиндра 1 щарнирно закреплены два разноплечих рычага 2 и 3 с неподвижными осями 4 и 5. К концам рычагов через переходные подвески 6, имеющие на
концах шарниры, подвешиваются зубчатые штанги 7 и 8, которые могут вращаться вокруг своих вертикальных осей на упорных подшипниках 9. Подвески 6 необходимы для того, чтобы вращательное движение концов
рычагов 2 и 3 (т. е. движение их но дугам) не препятствовало строго вертикальному движению зубчатых штанг 7 и 8 в направляющих. Поворотное устройство состоит из двух гидроцилиндров 10 и 11, которые имеют возможность поворачиваться на небольшой угол вокруг своих вертикальных осей 12. К концам штоков этих гидроцилиндров шарнирно кренятся рычаги 13 и 14, каждый из которых жестко укреплен на кольцах 15, охватывающих
штанги и имеющих скользящие шпонки, входящие в пазы штанги. Пазы в штангах выполнены на длину возвратно-поступательного движения штанги. Кронштейн 16, укрепленный на вертикальной стенке судоподъемной камеры, служит направляюшей для движения зубчатых штанг и, кроме того, удерживает кольца 15 от вертикальных перемещений, сохраняя возможность их поворота вместе со щтангал1и вокруг вертикальных осей. На зубчатых
щтангах через одинаковые промежутки с двух
сторон нарезаются зубья длиной, требуемой высотой подъема балки. Нижние и верхние концы штанг укреплены в направляющих, обеспечивающих вертикальное движение и вращение щтанг вокруг своих осей. Балка опирается на зубья штанг посредством брусьев 17, 18 и 19 (см. фиг. 2), жестко укрепленных в металлоконструкции балки. Между этими брусьями имеются проемы, достаточные для прохода зубчатых щтанг только при их холостом движении. Отсутствие горизонтальных смещений подъемной балки достигается с помощью роликов, укрепленных на балке и движущихся по вертикальным направляющим.
Подъем балки происходит с;1едующим образом.
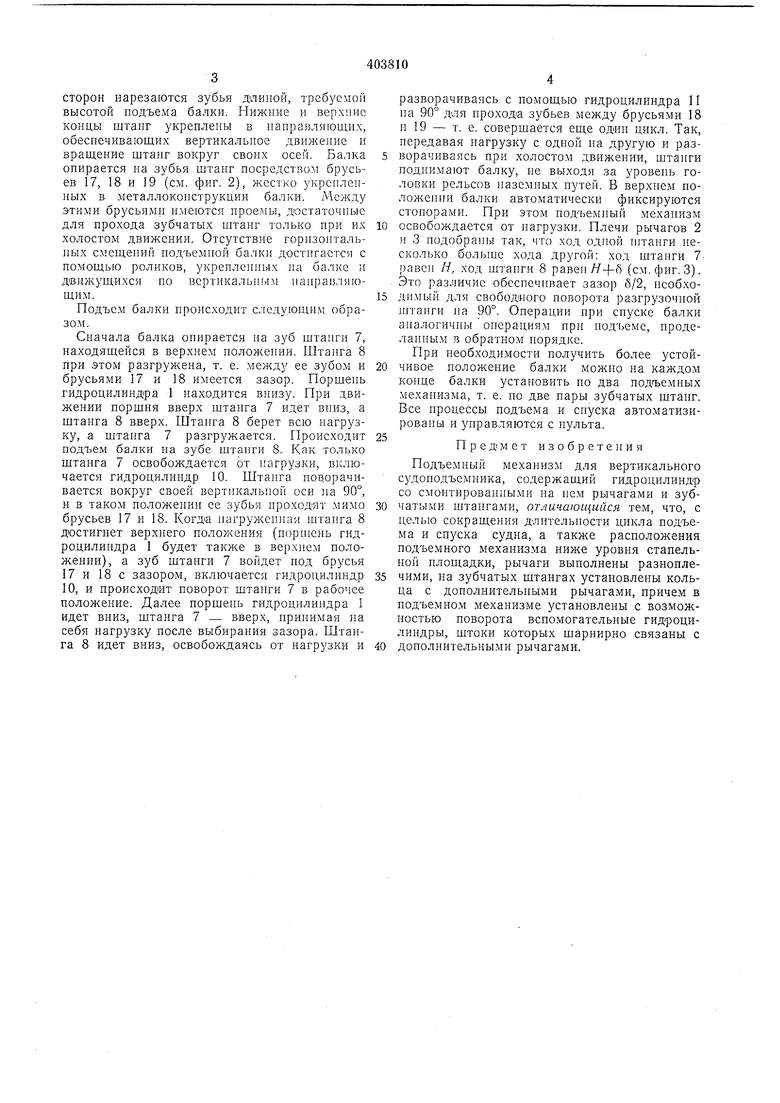
Сначала балка опирается иа зуб штаиги 7, находящейся в верхнем положении. Штанга 8 при этом разгружена, т. е. между ее зубом и брусьями 17 и 18 имеется зазор. Порщень гидроцилиндра 1 находится внизу. При движении порщпя вверх щтанга 7 идет вниз, а щтанга 8 вверх. Штанга 8 берет всю нагрузку, а щтанга 7 разгружается. Происходит подъем балки на зубе штапги 8. Как только щтанга 7 освоболедается от нагрузки, включается гидроцилиндр 10. Штанга поворачивается вокруг своей вертикальной оси на 90°, и в таком положении ее зубья проходят мимо брусьев 17 и 18. Когда нагруженная щтапга 8 достигнет верхнего положения (порнюнь гидроцилиидра 1 будет также в верхнем положении), а зуб щтанги 7 войдет под брусья 17 и 18 с зазором, включается гидроцилиндр 10, и происходит поворот щтанги 7 в рабочее положение. Далее порщень гидроцилиндра 1 идет вниз, щтанга 7 - вверх, принимая па себя нагрузку после выбирания зазора. Штапга 8 идет вниз, освобождаясь от нагрузки и
разворачиваясь с помощью гидроцилиидра П на 90° для прохода зубьев между брусья.ми 18 н 19 - т. е. соверщается еще один цикл. Так, передавая нагрузку с одной па другую и разворачиваясь при холостом движении, щтанги поднимают балку, не выходя за уровепь головки рельсов наземных путей. В верхнем положепии балки автоматически фиксируются стопорами. При этом подъемный механизм освобождается от нагрузки. Плечи рычагов 2 и 3 подобра Пз1 так, что ход одной Н1танги несколько больше хода другой: ход щтанги 7 равен Н, ход щтанги 8 равен (см. фиг. 3). Это различие обеспечивает зазор й/2, необходимый для свободного поворота разгрузочной пгганги па 90°. Операции при спуске балки аналогичны операциям прн нодъеме, проделанным в обратном порядке.
При необходимости получить более устойчивое положение балки можно на каждом конце балки установить по два подъемных механизма, т. е. по две пары зубчатых щтанг. Все процессы подъема и спуска автоматизированы и унравляются с пульта.
Предмет изобретения
Подъемный механизм для вертикального судоподъемника, содержащий гидроцилиндр со смонтированными на нем рычагами и зубчатыми щтангами, отличающийся тем, что, с целью сокращения длительности цикла подъема и спуска судна, а также расположения подъемного механизма ниже уровня стапельной площадки, рычаги выполнены разноплечими, на зубчатых щтангах установлены кольца с дополнительными рычагами, причем в подъемном механизме установлены с возможностью поворота вспомогательные гидроцилиндры, штоки которых щарнирно связаны с дополнительны.ми рычагами.
/7
Wi9
Фид.2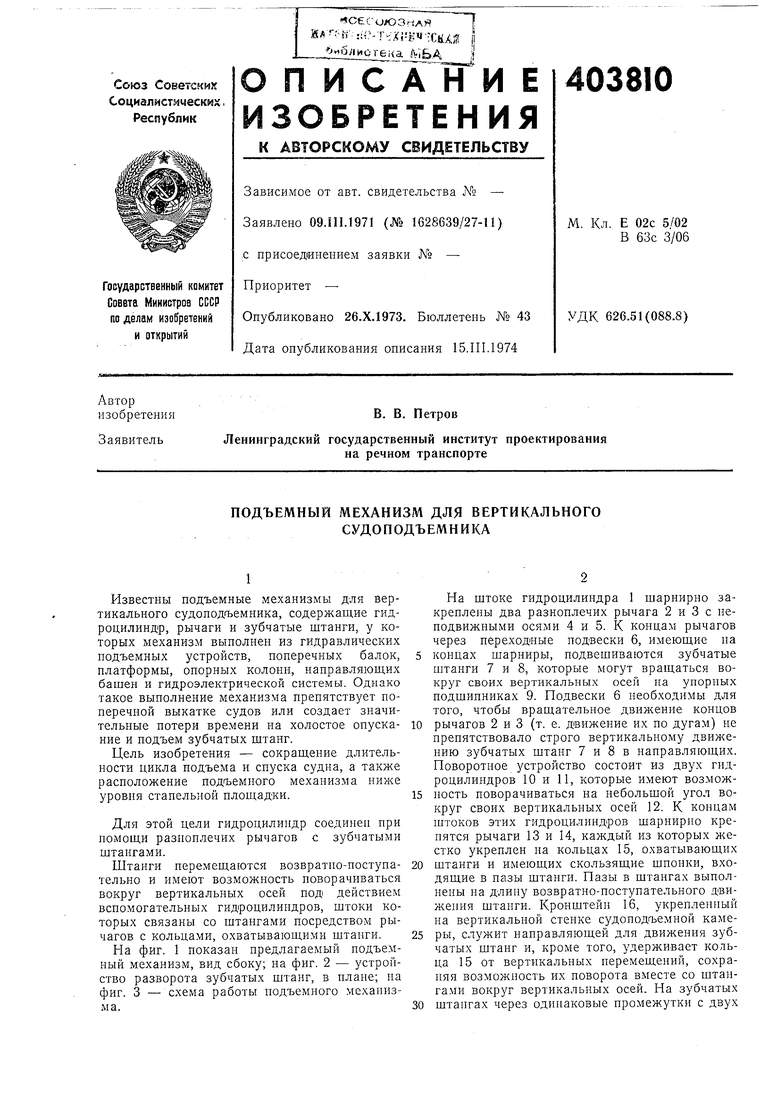
| название | год | авторы | номер документа |
|---|---|---|---|
| йСЕСиЮЗНАЯ | 1973 |
|
SU389987A1 |
| Вертикальный судоподъемник | 1979 |
|
SU783119A1 |
| Вертикальный судоподъемник | 1972 |
|
SU506687A1 |
| ВЕРТИКАЛЬНЫЙ КАНАТНЫЙ СУДОПОДЪЁМНИК | 2021 |
|
RU2778183C1 |
| Подъемный механизм вертикального судоподъемника | 1979 |
|
SU872636A1 |
| Шагающий движитель | 1978 |
|
SU823212A1 |
| Подъемный механизм вертикального судоподъемника | 1988 |
|
SU1523471A1 |
| Кантователь деталей | 1971 |
|
SU436773A1 |
| Подъемный механизм вертикального судоподъемника | 1977 |
|
SU679478A1 |
| ВЕРТИКАЛЬНЫЙ СУДОПОДЪЕМНИКI т" '^Wirr -.9I ^..,;,.; 1..U... ..ISEHDAIiJ'icKA | 1965 |
|
SU172685A1 |