1
Изобретение каеается транснортны.х устройств для перемещения грузов, обрабатываемых деталей или «ювет вертикально Bisepx и. вниз.
Известны устройства для вертикального штабелирования штучных грузов, содержаиьме систему вертикальных сиорных и подъемно-опускных штащг, снабженных убирающимися упорами.
в таких устройствах перемещение штучных грузов «возможно лишь в одном иакравлеиии, например только вверх, что снижает возмож:иости их истюльзоваиия.
Целью изобретения является обеспечение возможности как иодьема, так и опускания грузов.
Для утого предлагаемое устройство еиабжоио мехаиизмамп аюворота опорных и иодъеМНо-опускных штанг, каждый пз которых выполнеп 1В виде силового дилиидра, соедииен.иого посредством реечной передачи с закрепленными на штангах зубчатыми секторами, уиоры жестко укренлены на П1тангах, а для последовательного перемеи1е1ния грузов с упоров опорных штанг на упоры Оиорио-опуокпых штанг силовые пилиндры их иОВорота в кл ю ч ей ы и Oc;i вдо в а тел ьн о.
Расположено устройство в чередующихся шахтах иодъема )i щахтах оиускания и снабжено иерета.да иваюпл1М механизмом, вьшолпсииым в виде силового цилиндра с толкателем и грузонесущих -иланок, взаимодействующих с закрепленными на опорных штаигах кривошипами разного радиуса. Это позволяет обеспечить paбoтy устройства в оиределеином технологическом цикле путем последовательного подъема п опускания грузов, например ири длительном термостатировании уретанозого полимера.
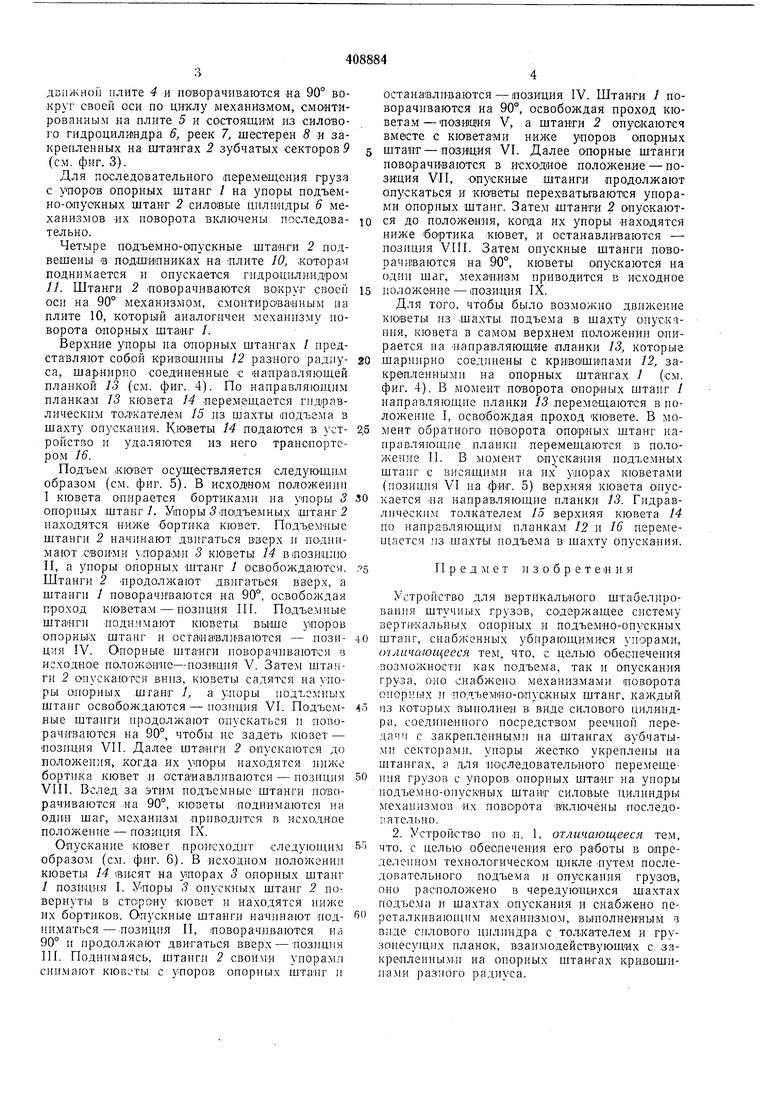
На фиг. схематичио изображепо предлагаемое устройство для верти.кального штабе.лироваиия штучных грузов, продольный и поперечный разрезы; па фпг. 2-гор)13оитальный разрез; на (тиг. 3 - механизм поворота
И1тапг; на фпг. 4 - механизм .переноса кювег из иодъемпо шахты в Опуокиую; на фиг. 5- схема иодъема кювет; на фпг. 6 - схема опускания кювет.
В каждой шахте устройства размещена спстема вертнкальных опорных щтант / и под1 емио-опуекных штанг 2, по всей высоте которых закреплены убирающиеся упоры 3. расположены на одинаковом расстояни) один от другого - на величину шага подъема
или оиуска-иия, причем шаг подъелга может отлпчаться от тага опускаипя, п, следовательно, могут отличаться друг от друга скорости подъе: 1а п оиусканин.
Четыре штанг) / являются опорнымп. Онл
подвешены в иодшппнпках на верхпей неподвпжнон плите 4 и поворачиваются «а 90° вокруг своей оси по циклу механизмом, смонтированным на плите 5 и состоящиэд из силового гидроцили1ндра 6, реек 7, шестерен 8 и закрепленных на штаигах 2 зубчатых секторов 9 (см. фиг. 3).
Для последовательного перемещения груза с упоров опорных штанг / на упоры подъемно-опускных штаНГ 2 сило:вые цилиндры 6 механизмов -их поворота включены по-следо-вательно.
Четыре подъемно-опускные штадаги 2 подвешены В подшипниках на плите 10, которая поднимается и опускается гидродилиндром 11. Штанги 2 поворачиваются вокруг своей оси на 90° механизмом, смонтированным па плите 10, который аналогичен механизму поворота опорных ШТЯНГ 1.
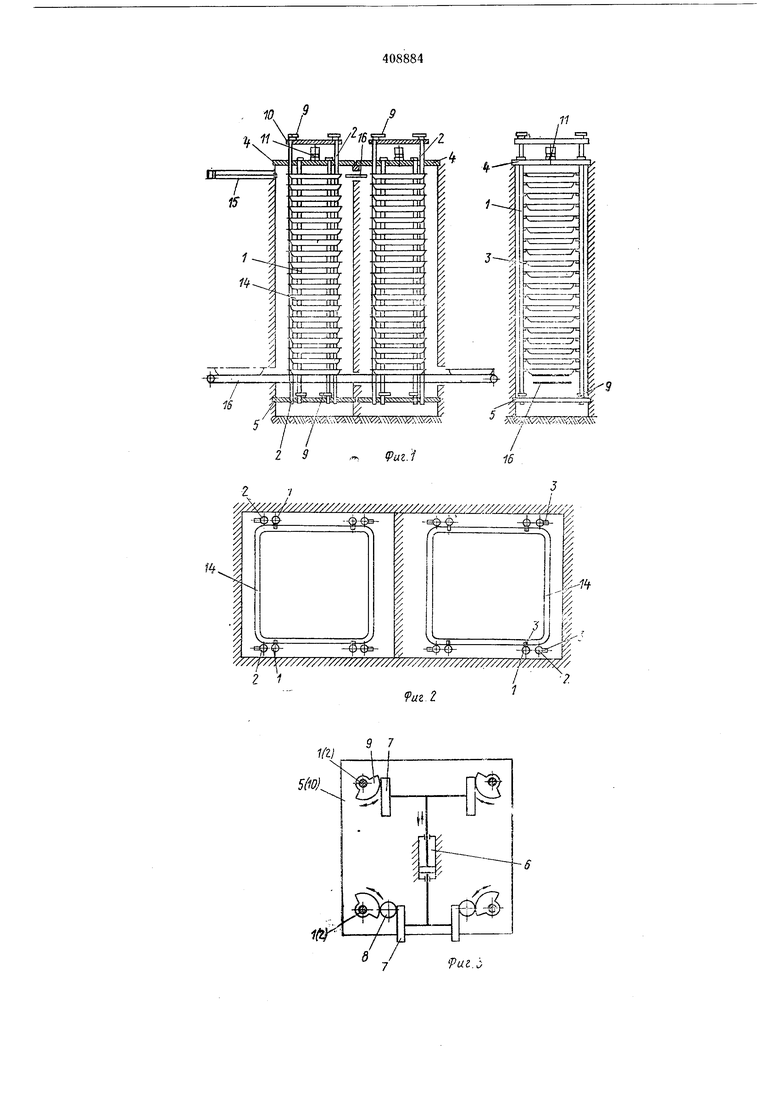
Верхние упоры на опорных штангах / представляют собой к-ривошипы 12 разного радиуса, шарнирио соединенные с направляющей планкой 13 (см. фиг., 4). По направляющим планкам 13 кювета 14 перемещается гидравлическим толкателем 15 из шахты подъема в шахту опускания. Кюветы 14 подаются в стройстзо и удаляются из него трап-спортсром 16.
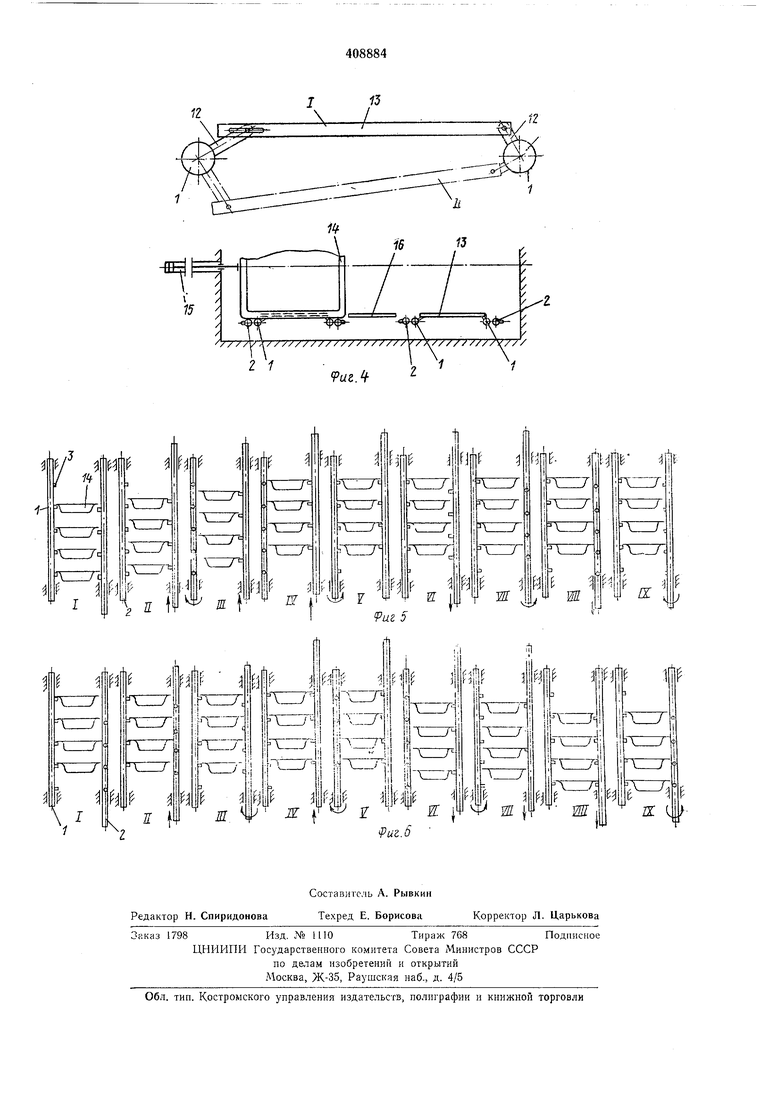
Подъем кювет осуществляется следующи.м образом (см. фиг. 5). В исходном положении I кювета опирается бортиками на упоры 3 опорных штанг 7. Упоры 5 подъемных штанг 2 находятся ниже бортика кювет. Подъ.емные щтанги 2 начинают двигаться вверх и поднимают своИМи у1порамн 3 кюветы 14 в позицию
II,а упоры опорных штанг 1 освобождаются. Штанги 2 Продолжают двигаться вверх, а штанги 1 поворачиваются на 90°, освобождая проход кюветам - позиция III. Подъемные щтанги поднимают кюветы выше упоров опорньк штанг и останавливаются - позиция IV. Опорные штанги повораяиваются в исходное положоние-позицпя V. Затем штаяги 2 опускаются вниз, кюветы садятся на упоры опорных штанг 1, а упоры подъемных штанг освобождаются - позиция VI. Подъемвые штапги продолжают опускаться и поворачиваются на 90°, чтобы не задеть кюзет - позиция VII. Далее щтанги 2 опускаются до положения, когда их упоры находятся ниже бортика кювет .и останавливаются - позиц гя VIIl. Вслед за эти-.м подъемные штанги поворачиваются на 90°, кюветы подннмаются на один шаг, механизм прпводится в исходное положение - позиция IX.
Опускание кювет происходит -следующим образом (см. фиг. 6). В исходном ноложении кюветы 14 1ВИ.СЯТ на упорах 5 опорных штанг / позиция I. Упоры 3 опускных штанг 2 повернуты в сторону кювет и находятся ниже их бортиков. Опускные щтанги начинают тюдииматься-позиция II, поворачиваются на 90° и продолжают двигаться вверх - позипмя
III.Поднимаясь, штанги 2 своими уиорамп снимают кюветы с упоров опорных штанг и
останавливаются - позиция IV. Штанги 1 поворачиваются на 90°, освобождая проход кюветам- позии ия V, а штатаги 2 опуокаютсч вместе с кюветами ниже упоров опорных штанг - поЗнция VL Далее опорные щтанги поворачиваются в Исходное положение - позиция VII, опускные щтанги продолжают опускаться и кюветы перехватываются упорами опорных штанг. Затем щтанги 2 опускаются до положения, когда их упоры находятся ниже бортика кювет, и останавливаются - позиция VIII. Затем опускные щтанги поворачиваются на 90°, кюветы опускаются на один щаг, механизм приводится в исходное II о л о ж ен и е - in озици я IX.
Для того, чтобы было возможно движение кюветы из шахты подъема в щахту опускппия, кювета в самом верхнем положении опирается на направляющие оланки 13, которые шарнирно соединены с кривошипами 12, закрепленными на опорных штангах 1 (см. фиг, 4), В .момент поворота опорных щтаиг 1 направляющие планки 13 перемещаются в положение I, освобождая проход кювете. В момент обратного поворота опорных штанг направляющие планки перемещаются в положение II. В момент опускания подъе.мных штанг с висящими на их упорах кюветами (позиция VI на фиг. 5) верхняя кювета опускается на направляющие планки 13. Гидравлическим толкателем 15 верхняя кювета 14 по направляющим планкам 12 и 16 перемещается из ша.хты подъема в шахту опускания.
Предмет и з о б р е т е « и я
Устройство для вертикального штабелирования штучных грузов, содержащее систему вертикальиых оиориых и подъемно-опускных штанг, снабженных убирающимися упорами, (пличающееся тем, что, с целью обесиечения возможности как подъема, так и опускания груза, оно снабжено механизмами поворота опорных и подъем1но-опус1кных штанг, каждый из которых вынолнен в виде силового цилиндра, соединенного посредством реечной передачи с закрепленными на щтангах вубчатыми секторами, упоры жестко укреплены на игтангах, а .т,ля последовательного перемещения грузов с упоров опорных щтанг на упоры подъемно-опускных щтанг силовые цилиндры механизмов нх поворота включены последопательно.
2. Устройство по н. 1, отличающееся тем, что, с целью обеспечения его работы в опре. елеином технологическом цикле путем последовательного подъема и опускания грузов, оно расположено в чередующихся щахтах подъема и шахтах опускания и снабжено переталкиваюп,им механизмом, выполненным в виде силового цилиндра с толкателем и грузонесущих планок, взаимодействующих с закрепленными на опорных щтангах кривошипами разного радиуса.
//// /Л/// ///// / ////////// ////////////////////)/////,
2 /
9azl
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вертикального штабелирования и разборки штабеля штучных грузов | 1977 |
|
SU735531A1 |
| Устройство для хранения и транспортирования штучных изделий | 1978 |
|
SU745793A1 |
| Вертикальный накопитель для штучных грузов | 1985 |
|
SU1303504A1 |
| Вертикальный накопитель для штучных грузов | 1979 |
|
SU901170A1 |
| УСТРОЙСТВО для ЗАВЕРТЫВАНИЯ В БУМАГУ ИЗДЕЛИИ ПРЯМОУГОЛЬНОЙ ФОРМЫ | 1972 |
|
SU330073A1 |
| Пакеторазборная машина для штучных грузов | 1979 |
|
SU889575A1 |
| Перегрузочное устройство для штучных грузов | 1980 |
|
SU937284A1 |
| УСТРОЙСТВО для УКЛАДКИ в СТОПУ ШТУЧНЫХ ПРЕДМЕТОВ12 | 1973 |
|
SU367016A1 |
| Устройство для укладки изделий в тару | 1982 |
|
SU1050978A2 |
| Склад для хранения штучных грузов | 1982 |
|
SU1031851A1 |
Pat.:.
11
/V / //// / /7 / у X// Т// ////V/ /.
2 ,,, Р N
П
п
f
