f
Изобретение относится к специальному Tpy6orH6o4HONfy оборудованию и может быть использовано в машиностроении, для изготовления змеевиков сложной формы из длинномерных трубных плетей, применяемых в конструкциях теплообмена и нагрева парогенераторов ТЭС и АЭС,
Цель изобретения - улучшение качества гибки и повьшение точности геометрической формы крупногабаритных змеевиков за счет регулирования в процессе гибки величины осевого усилия в зависимости от геометрии поперечного сечения трубы на изгибаемом участке.
На фиг.1 изображен станок для гибки змеевиков, общий вид; на фиг.2 - то же, в плане; на фиг.З - разрез А-А на фиг.1; на фиг.4 - разрез Б-Б на фиг.З; на фиг.5 - разрез В-В на фиг.1; на фиг.6 - вид Г на фиг.5; на фиг.7 - разрез Д-Д на фиг.5; на фиг.З - узел 1 на фиг,5.
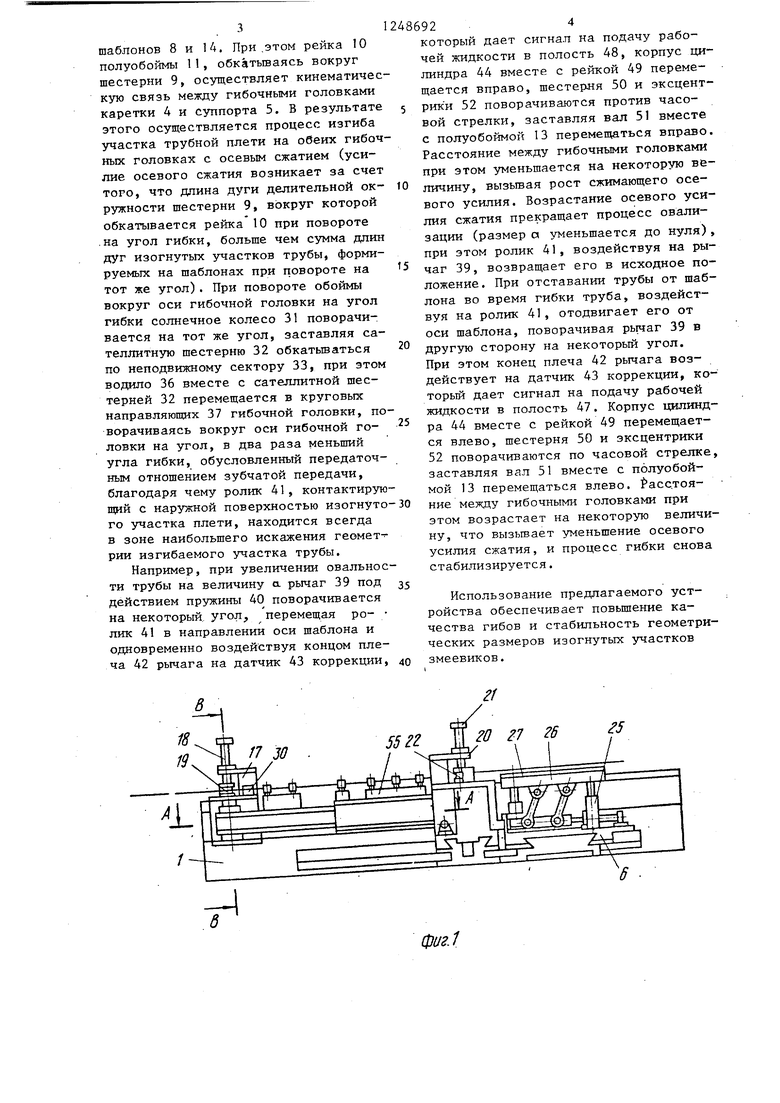
Станок содержит Т-образную станину 1, во взаимно перпендикулярных направляющих 2 и 3 которой с возможностью перемещения смонтированы каретка 4 и суппорт 5 и поддерживающая плита 6, подвижно смонтированная в направляющих 7. На каретке 4 поворотно смонтирована гибочная головка представляющая собой ось-полушаблон 8 с жестко закрепленной на ней шестерней 9, сопряженной с зубчатой рейкой 10, жестко связанной с полуобоймой 1 1., установленной с возможностью перемещения в пазах полуобоймы 12, которая в свою очередь телескопически связана с полуобоймой 13, шарнирно установленной на оси, полушаблона 14, жестко закрепленной в опорах суппорта 5.,
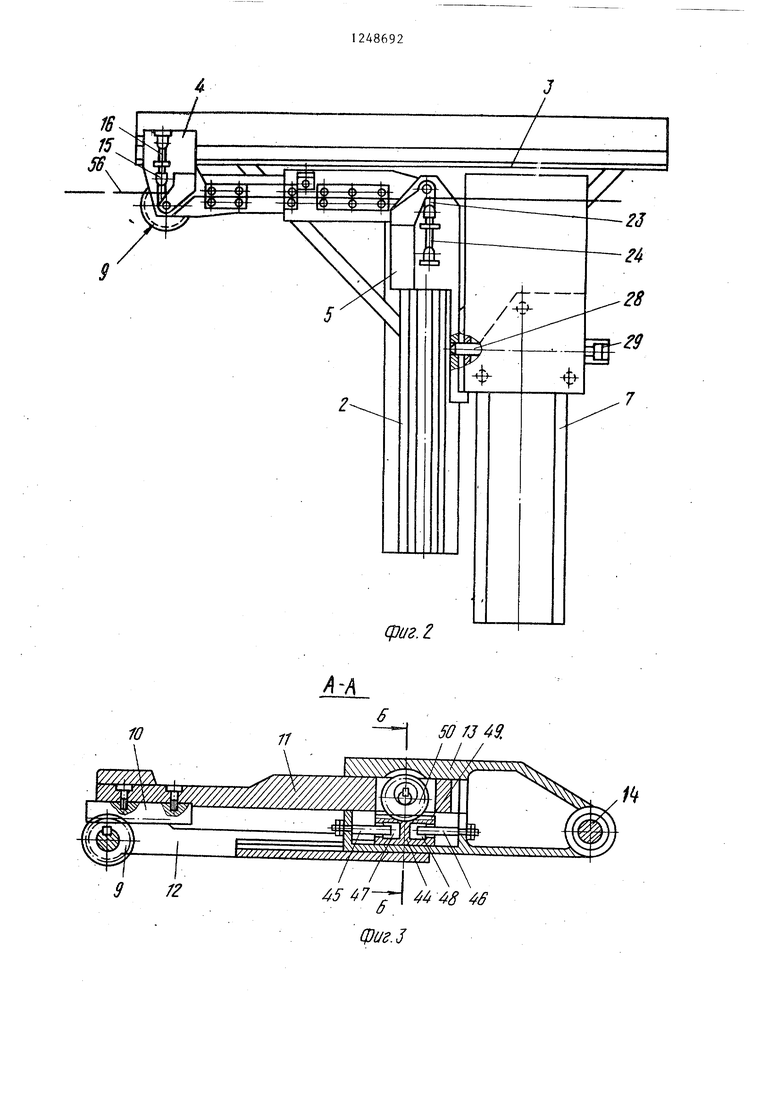
На каретке 4 укреплен прижим 15 с приводным гидроцилиндром 16 и кронштейн 17 с гидроцилиндром 18, соединенным своим штоком с верхним полу- шаблошэм 19.
На суппорте 5 смонтирован кронштейн 20 с закрепленным на нем цилиндром 21, шток которого соединен с верхним полушаблоном 22, и прижим 23 с приводным гидроцилиндром 24,
На поддерживающей плите 6 в направляющих колонках 25 подвижно смонтирована подъемная платформа 26, связанная шарнирно-рычажной системой 27 и фиксатором 28 со штоком силово48692
го цилиндра 29, жестко закрепленным ,на плите 6.
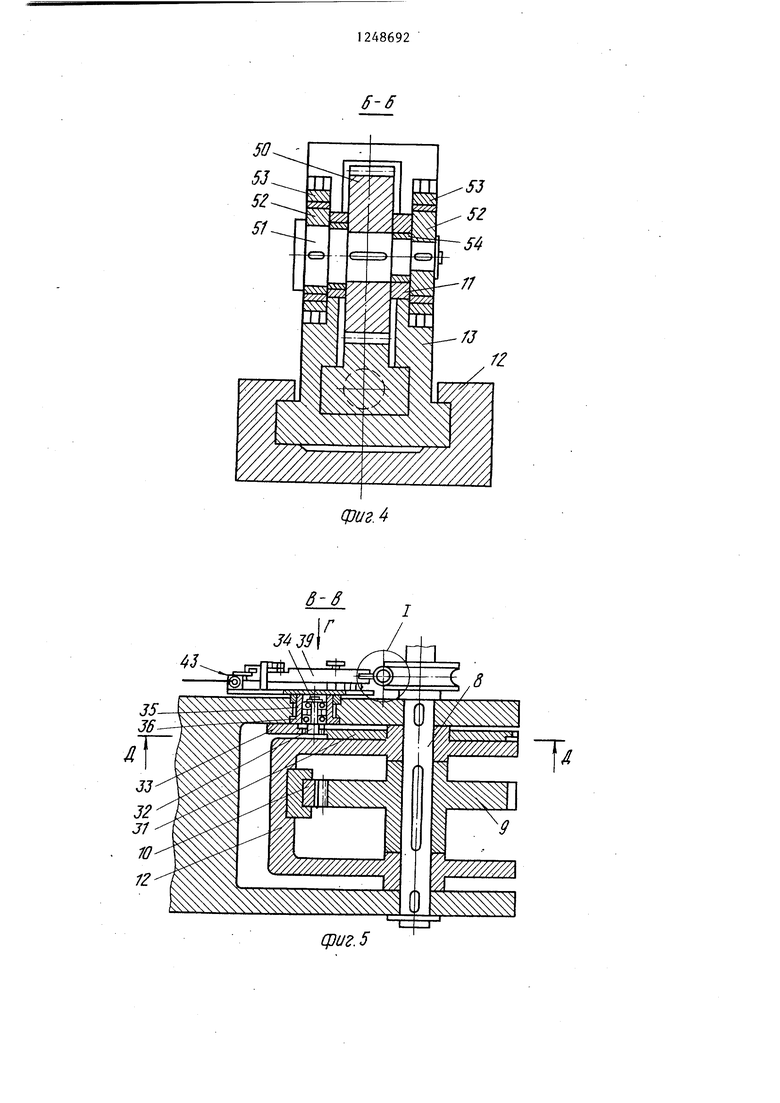
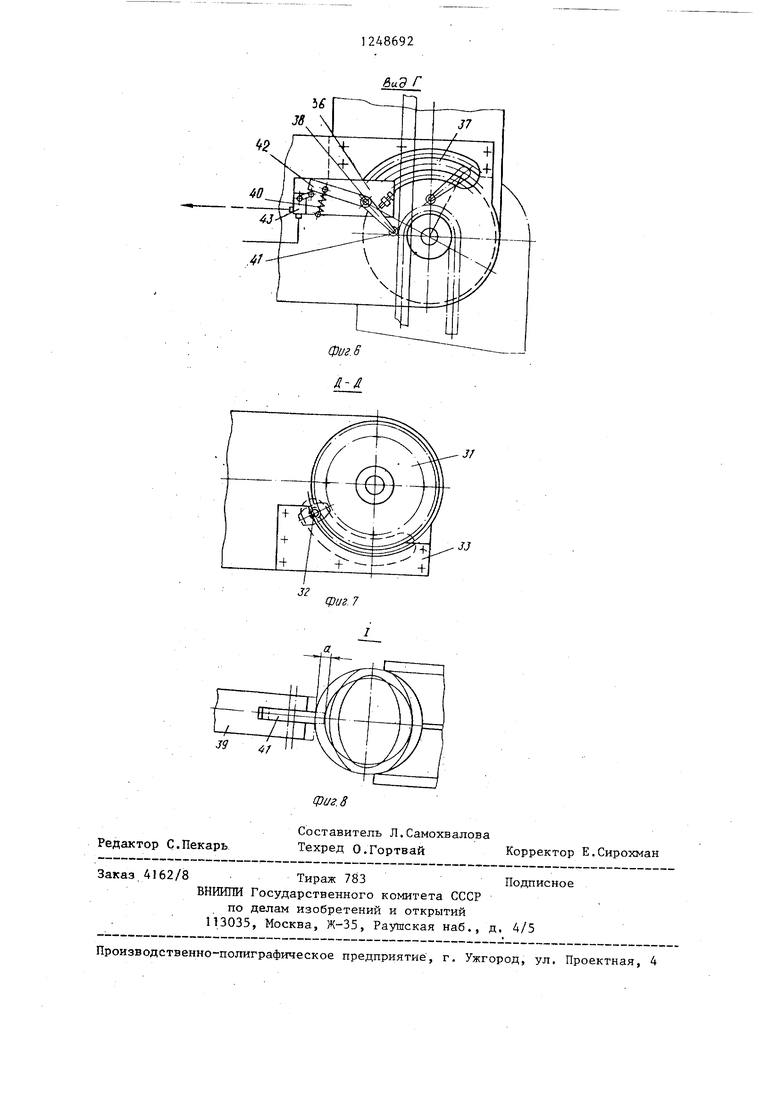
Каждая гибочная головка каретки и суппорта снабжена блоком 30 управ5 ления осевым усилием сжатия. Каждый блок представляет собой планетарную передачу, у которой солнечное колесо 31 установлено соосно оси полушаб- лона и жестко связано с полуобоймой
10 12 гибочного шаблона. Солнечное колесо сопряжено с шестерней-сателлитом 32, находящейся в зацеплении с зубчатым сектором 33, жестко закрепленньтм на корпусе гибочной головки. При
15 этом ось 34 вращения шестерни-сателлита смонтирована параллельно оси полушаблона в подшипниках 35 качения, установленных внутри водила 36, размещенного с возможностью перемещения
20 в круговых направляющих 37 корпуса головки, при этом.на водиле эксцентрично оси шестерни-сателлита установлена ось 38 поворота двуплечего рычага 39, подпружиненного пружиной 40,
25 одно плечо которого снабжено роликом 41, размещенным в плоскости разъема полушаблонов и контактирующим с изделием в процессе гибки, а второе плечо 42 упомянутого рычага контактиру30 ет с датчиком 43 коррекции, гидравлически связанным с корректирутощим цилиндром 44 двустороннего действия, штоки 45 и 46 которого, взаимодействующие с полостями 47 и 48, жестко
35 соединены с полуобоймой 13.
Корпус Цилиндра жестко связан с зубчатой рейкой 49, сопряженной с шестерней 50, жестко закрепленной на валу 51 в центральной его части, а
40 на концах его жестко смонтированы эксцентрики 52, взаимодействующие посредством ползушек 53 с полуобоймой 13. Вал 51 поворотно закреплен в-полуобойме 11 на подшипниках 54.
45 поворотных обоймах смонтированы блоки поддерживаюш11х роликов 55, предотвращающих потерю устойчивости трубной плети 56 в процессе гибки.
Станок для гибки змеевиков работа- 50 ет следзпощим образом.
Трубная: плеть 56 устанавливается в ручьи шаблонов гибочных головок и фиксируется в них. Включением привода станка осуществляется перемещение 55 каретки 4 и суппорта 5 по направляющим 2 и 3, в результате чего осуществляется поворот полуобойм 12 и 13 во- jKpyr осей гибочных головок осей-полу3
шаблонов 8 и 14, При .этом рейка 10 полуобоймы 11, обкатьгоаясь вокруг шестерни 9, осуществляет кинематичес кую связь между гибочными головками каретки 4 и суппорта 5. В результате этого осуществляется процесс изгиба участка трубной плети на обеих гибоч ных головках с осевым сжатием (усилие осевого сжатия возникает за счет того, что длина дуги делительной окружности шестерни 9, вокруг которой обкатывается рейка 10 при повороте .на угол гибки, больше чем сумма длин дуг изогнутых участков трубы, формируемых на шаблонах при повороте на тот же угол). При повороте обоймы вокруг оси гибочной головки на угол гибки солнечное колесо 31 поворачивается на тот же угол, заставляя са- теллитную шестерню 32 обкатьтаться по неподвижному сектору 33, при этом водило 36 вместе с сателлитной шестерней 32 перемещается в круговых направляюшлх 37 гибочной головки, поворачиваясь вокруг оси гибочной головки на угол, в два раза меньший угла гибки, обусловленный передаточ- ньм отношением зубчатой передачи, благодаря чему ролик 41, контактирующий с наружной поверхностью изогнуто го участка плети, находится всегда в зоне наибольшего искажения геометрии изгибаемого участка трубы.
Например, при увеличении овальное ти трубы на величину а рычаг 39 под действием пружины 40 поворачивается на некоторый угол, перемещая ро- лик 41 в направлении оси шаблона и одновременно воздействуя концом плеча 42 рычага на датчик 43 коррекции.
ts
2486924
который дает сигнал на подачу рабочей жидкости в полость 48, корпус цилиндра 44 вместе с рейкой 49 перемещается вправо, шестерня 50 и эксцент- 5 рик и 52 поворачиваются против часовой стрелки, заставляя вал 51 вместе с полуобоймой 13 перемещаться вправо. Расстояние между гибочными головками при этом уменьшается на некоторую вв- 0 личину, вызывая рост сжимающего осевого усилия. Возрастание осевого усилия сжатия прекращает процесс овали- зации (размер а уменьшается до нуля), при этом ролик 41, воздействуя на рычаг 39, возвращает его в исходное положение . При отставании трубы от шаблона во время гибки труба, воздействуя на ролик 41, отодвигает его от оси шаблона, поворачивая рьгчаг 39 в другую сторону на некоторый угол. При этом конец плеча 42 рычага воздействует на датчик 43 коррекции, который дает сигнал на подачу рабочей жидкости в полость 47. Корпус цилиндра 44 вместе с рейкой 49 перемещается влево, шестерня 50 и эксцентрики 52 поворачиваются по часовой стрелке, заставляя вал 51 вместе с полуобой- мой 13 перемещаться влево, асс.тоя- 30 ние между гибочными головками при
этом возрастает на некоторую величину, что вызьгоает уменьшение осевого усилия сжатия, и процесс гибки снова стабилизируется.
20
25
Использование предлагаемого устройства обеспечивает повьш1ение качества гибов и стабильность геометрических размеров изогнутых участков змеевиков.
г5
фиг.1
фиг.г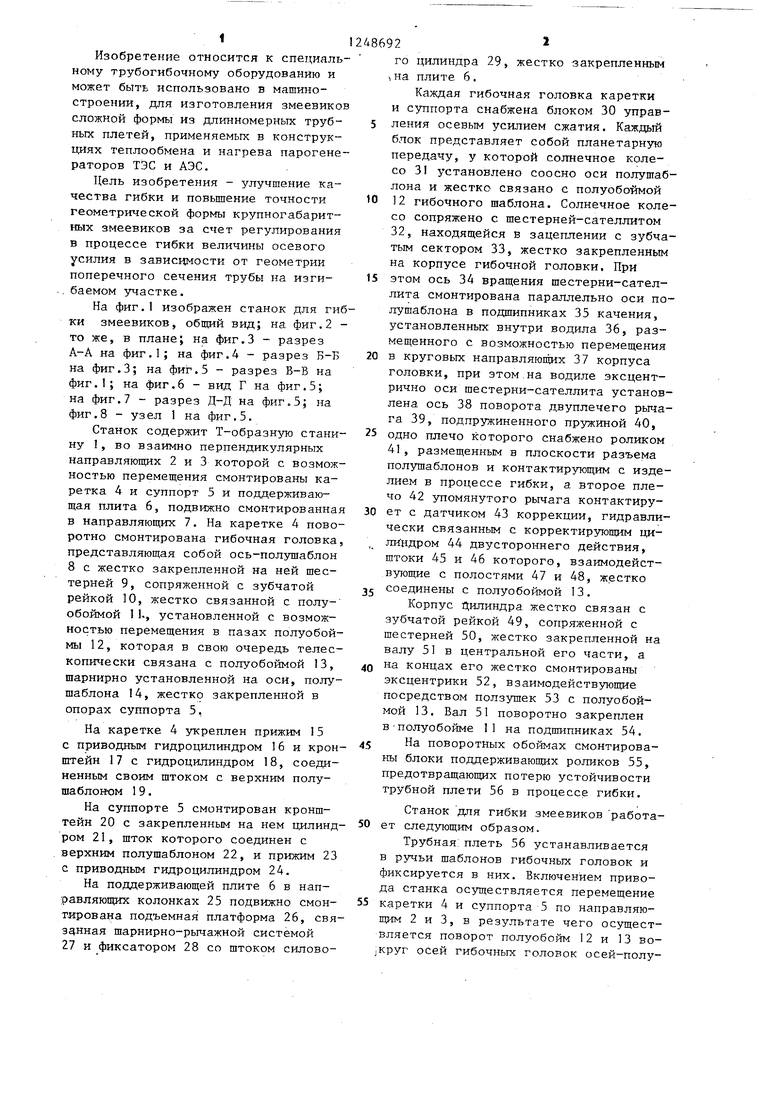
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для гибки змеевиков | 1985 |
|
SU1400711A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1333437A2 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| Станок для гибки змеевиков | 1984 |
|
SU1207562A2 |
| Станок для гибки змеевиков | 1980 |
|
SU935162A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Станок для гибки змеевиков | 1979 |
|
SU854507A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1411075A1 |
ери г A
6-3
ери г. 5
Т
фиг. 7
33
39
Редактор С.Пекарь
фиг. 8
Составитель Л.Самохвалова Техред О.Гортвай
Заказ 4162/8Тираж 783Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Е.Сирохман
| Станок для гибки змеевиков | 1980 |
|
SU935162A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
