1
Изобретение относится к области сельского хозяйства, а именно к устройствам для сбора плодов, напрнмер бахчевых.
Известен рабочий орган для захвата и переноса плодов, включающий корпус и трубку с эластичным присосом, связанную пневмоприводом с вакуум-насосом. Рабочие органы установлены на поверхности барабана, и при прокатывании последнего плоды присасываются вакуумом, создаваемым в пневмовсасывающей системе, к присосам. Однако такой рабочий орган имеет большую энергоемкость и конструкцию.
Цель изобретения - упрощение конструкции для механизации ручного подбора плодов.
Это достигается тем, что привод выполнен в виде тяги с рукояткой, соединенной с присосом, а в корпусе имеются пазы с фиксирующими рукоятку выступами.
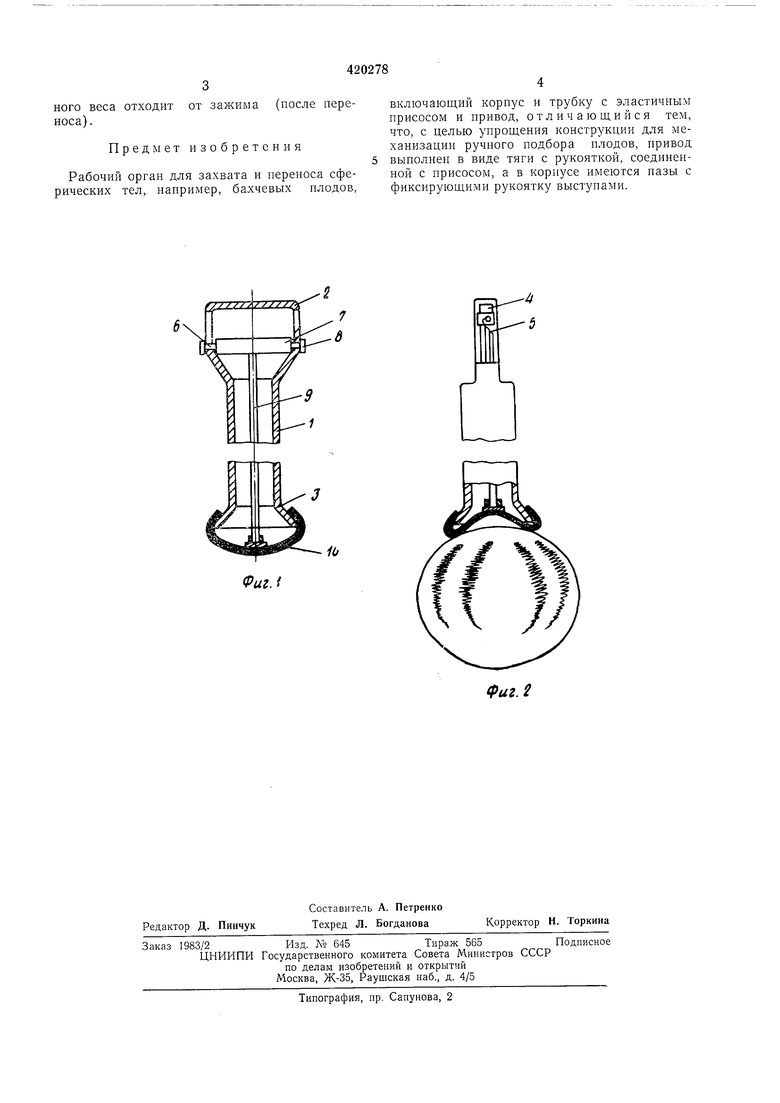
На фиг. 1 нзображен предлагаемый рабочий орган в нерабочем состоянии, вид сбоку в разрезе; на фиг. 2 - то же, в рабочем состоянии.
Рабочий орган состоит из корпуса 1, в средней части имеющего вид трубки, переходящего в верхней части в П-образную рукоятку 2, а в нижней части - в конусообразный раструб 3. На боковой поверхности верхней части корпуса с двух сторон выполнены прямоугольные пазы 4 с фиксирующими выступами
5, обращенными внутрь паза. Внутри пазов перемещаются оси б, прикрепленные к подвижной рукоятке 7. Для торцового ограниченпя на осях б посажены планки 8. К ссредипе рукоятки 7 прикреплена тяга 9. соединенная через фланец 10 с эластнчным присосом, герметично присоедине)1НЫ1М к конической части корпуса.
Рабочн орган работает следующим образом.
Четыре пальца одной руки располагаются на подвижной рукоятке, захватывая се снизу. Затем рабочи орган прикладывают к иоверхности п,тода. Касаясь его эластпчным присосом и прижимая крае.м ладони верхнюю часть корпуса, пальцами поднимают подвижную рукоятку с тягой и фланцем, вслед за которыми поднимается и эластичный присос, образуя разреженную полость между поверхностями нлода и присоса, что создает условия для возникновения сил прижатия атмосферным давлением плода к краям эластичного присоса. Прижатие осуществляется плотно и надежно. Подъем присоса заканчнвается тогда, когда рукоятка будет зафиксирована на выетупах корпуса.
После снятия рукоятки с фиксаторов, опуская ее, эластичны присос сжимается, и полость между плодом и присосом уменьшается настолько, что плод под тяжестью собственного веса отходит от зажима (после переноса).
Предмет изобретения
Рабочий орган для захвата и переноса сферических тел, например, бахчевых плодов.
включающий корпус и трубку с эластичным присосом и привод, отличающийся тем, что, с целью упрощения конструкции для механизации ручного подбора плодов, привод выполнен в виде тяги с рукояткой, соединенной с присосом, а в корпусе имеются пазы с фиксирующими рукоятку выступами.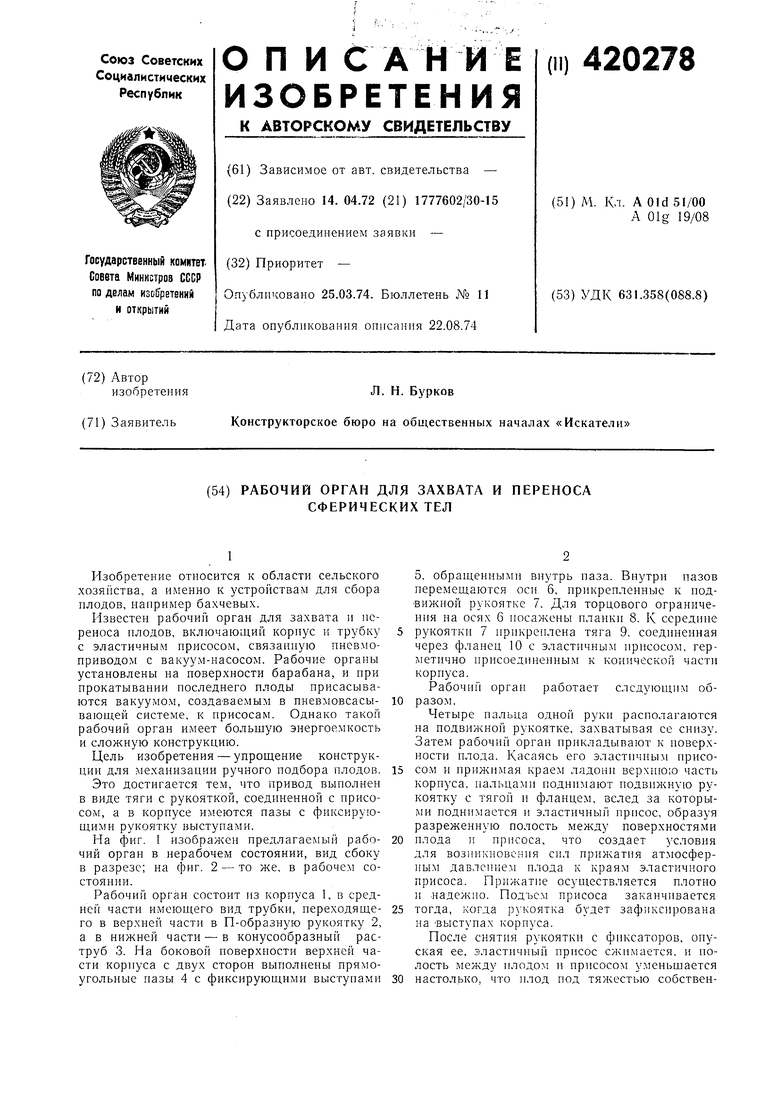
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1972 |
|
SU446411A2 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Машина для сбора плодов | 1983 |
|
SU1140710A1 |
| Приспособление для съема плодов с деревьев | 1981 |
|
SU948329A1 |
| Автомат для укладки плодов | 1960 |
|
SU134622A1 |
| Устройство для автоматической загрузки тонколистных металлических (прямоугольных) пластин в валки красильной или иной машины | 1960 |
|
SU143349A1 |
| Вакуумная рейка для бокового равнения листов | 1978 |
|
SU718350A1 |
| УСТРОЙСТВО для УКЛАДКИ в КОРОБКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1969 |
|
SU257331A1 |
| Устройство для тренировки пловцов | 1986 |
|
SU1395343A1 |
| АВТОМАТ ДЛЯ ТРАВЛЕНИЯ | 1965 |
|
SU170123A1 |
Фиг.{
-и
Ь
