1
Изобретение относится к области механической обработки металлов, а именно - к автооператорам для центровых токарных станков-автоматов и автоматических линий по обработке деталей типа валов.
Известны автооператоры с приводными звеньями для загрузки и разгрузки токарных станков, оси захватов которых параллельны оси центров станка.
Описываемый автооиератор отличается от известных тем, что захваты закреплены на осях, подвижно установленных на приводных звеньях. Оси захватов, осуществляющих загрузку, снабжены кронштейном, взаимодействующим с упором, установленным на ниноли станка, а на неподвижной части автооператора установлены двуплечие рычаги, взаимодействующие с упорами на приводных звеньях.
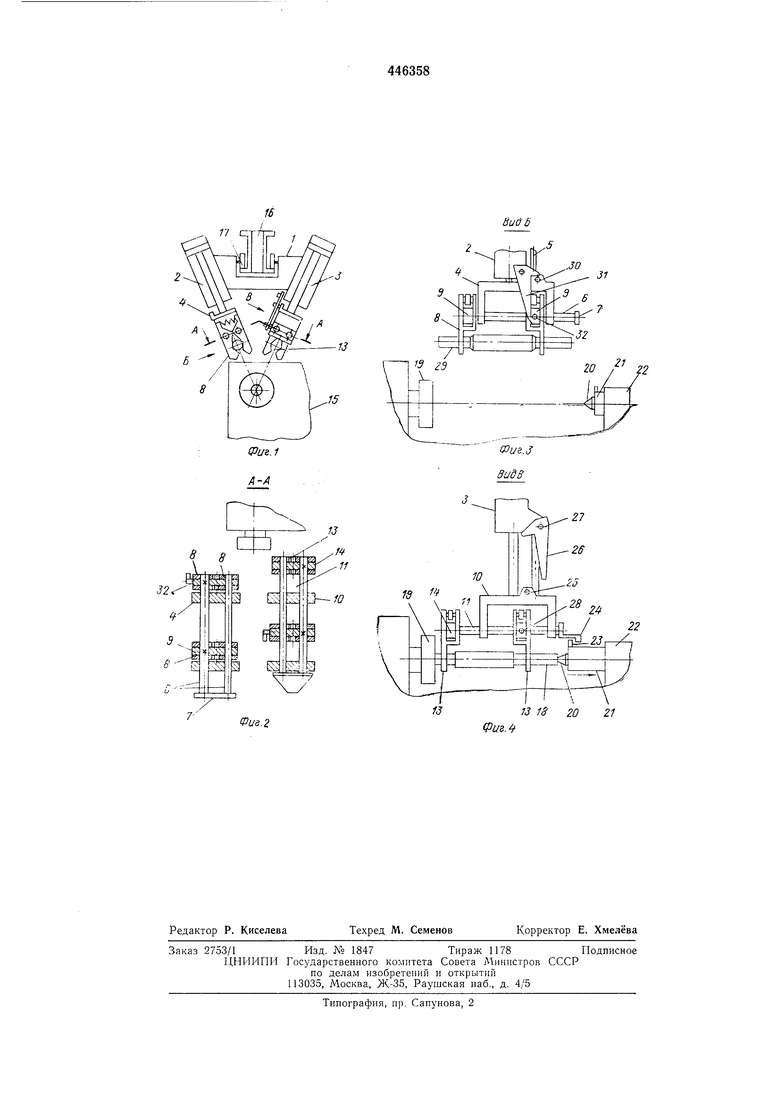
Сущность изобретения показана на чертежах, где на фиг. 1 - автооператор в положении, соответствующем началу разгрузки станка, вид с торца станка (со стороны задней бабки); на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - вид В на фиг. 1 (разгружающая рука автооператора изображена в опущенном положении, соответствующем моменту начала хода пиноли задней бабки станка).
На каретке 1 автооператора установлены гидроцилиндры (или пневмоцилиндры) загрузочной 2 и разгрузочной 3 рук автооператора. На штоке гидроцилиндра загрузочной руки 2 установлена скоба 4, являющаяся ириводным звеном этой руки. (Зкалка 5 нред,отвращает поворот скобы 4 относительно оси штока. В скобе 4 установлены две оси 6, свободно перемещающиеся относительно скобы вдоль
своих осей и скрепленные плаикой 7. На осях 6 также свободно установлены захваты 8, имеющие между собой (попарно) зубчатое зацепление. Перемещение захватов 8 вдоль осей б предотвращается колодкамп 9, жестко
укрепленнымп на осях 6 и помещенными внутри захватов 8, имеющих хвостовики П-образной формы. Привод захватов может быть лнбо пружинным (как показано на фиг. 1), либо гидравлическим, пневматическим и т. д.
На штоке гидроцнлиидра разгрузочной руки 3 установлены аналогичные скобы 10 (приводное звено), оси 11 с планкой 12, захваты 13 с колодками 14. На станке 15 автооиератор может устанавливаться различным образом. На фиг. 1 показан вариант, когда каретка 1 автооператора установлена на балке 16 и перемещается вдоль нее с помощью роликов 17. Автооператор работает следующим образом.
При подаче команды на разгрузку станка шток гидроцилиндра разгрузочной руки 3 движется вниз. В конце хода штока захваты 13 захватывают деталь 18 (см. фиг. 4), установленную в патроне 19 стайка и ноджатую центром 20 ниноли 21 задней бабки 22 станка. После этого ниноль 21 задней бабки станка отводится вправо. При этом центр 20 сначала выводится из центрового отверстия детали 18 (за ее торец), а затем унор 24, соединенный с осями 11 разгрузочной руки, перемещает оси II, а с ними и захваты 13 и деталь 18 вправо, выводя деталь из патрона 19. Затем шток гидроцилиндра разгрузочной руки движется вверх. В конце хода вверх упор 25 скобы 10 воздействует на рычаг 26, ось 27 которого установлена на неподвижной части руки, и поворачивает его. В результате поворота рычаг 26 своим вторым плечом воздействует на упор 28, укрепленный на колодке 14, и возвращает оси 11 и захваты 13 в крайнее левое (исходное) положение.
Далее шток гидродилиндра загрузочной руки движется вниз, перемещая заготовку 29 на ось центров станка. Затем пиноль 21 движется влево, перемещая и заготовку 29 (вместе с захватами 8 и осями 6). После ввода заготовки в патрон шток гидроцилиндра руки
движется вверх. В конце его хода упор 30 воздействует на рычаг 31, который с помощью упора 32 на колодке 9 возвращает захваты 8 загрузочной рукн в крайнее правое (исходное)
положение.
Таким образом, ввод заготовки в патрон и вывод обработанной детали из патрона осуществляются без применения дополнительного привода, а по времени эти операции совмещаются с другими операциями на станке.
Формула изобретения
1. Автоонератор с приводными звеньями для загрузки и разгрузки, например, токарных
станков, оси захватов которых параллельны оси центров станка, отличающийся тем, что, с целью упрощения конструкции, захваты закреплены на осях, подвижно установленных на приводных звеньях.
2. Автооператор по п. 1, отличающийся тем, что оси захватов, осуществляющихразгрузку, снабжены кронштейном, взаимодействующим с упором, установленным на пиноли станка.
3. Автооператор по пп. I и 2, отличающийся тем, что на его пеподвижной части устаиовлены двуплечие рычаги, взаимодействующие с упорами на приводных звеньях.
32
Фид.2
Вив 5
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР | 1972 |
|
SU344960A1 |
| ДВУХЗАХВАТНЫЙ АВТООПЕРАТОР | 1969 |
|
SU246293A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| АВТООПЕРАТОР | 1971 |
|
SU305035A1 |
| АВТООПЕРАТОР | 1965 |
|
SU174928A1 |
| ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ В ЦЕНТРАХ | 1967 |
|
SU195837A1 |
| Автомат для шлифования сквозных цилиндрических отверстий подшипниковых колец | 1961 |
|
SU150029A1 |
| Автооператор | 1969 |
|
SU344701A1 |
| АВТООПЕРАТОР | 1973 |
|
SU368007A1 |
| АВТОМАТИЧЕСКИЙ СТАНОК ДЛЯ ЧЕРНОВОЙ ОБРАБОТКИ КОЛЕЦ НЕПРАВИЛЬНОЙ ФОРМЫ | 1969 |
|
SU252812A1 |