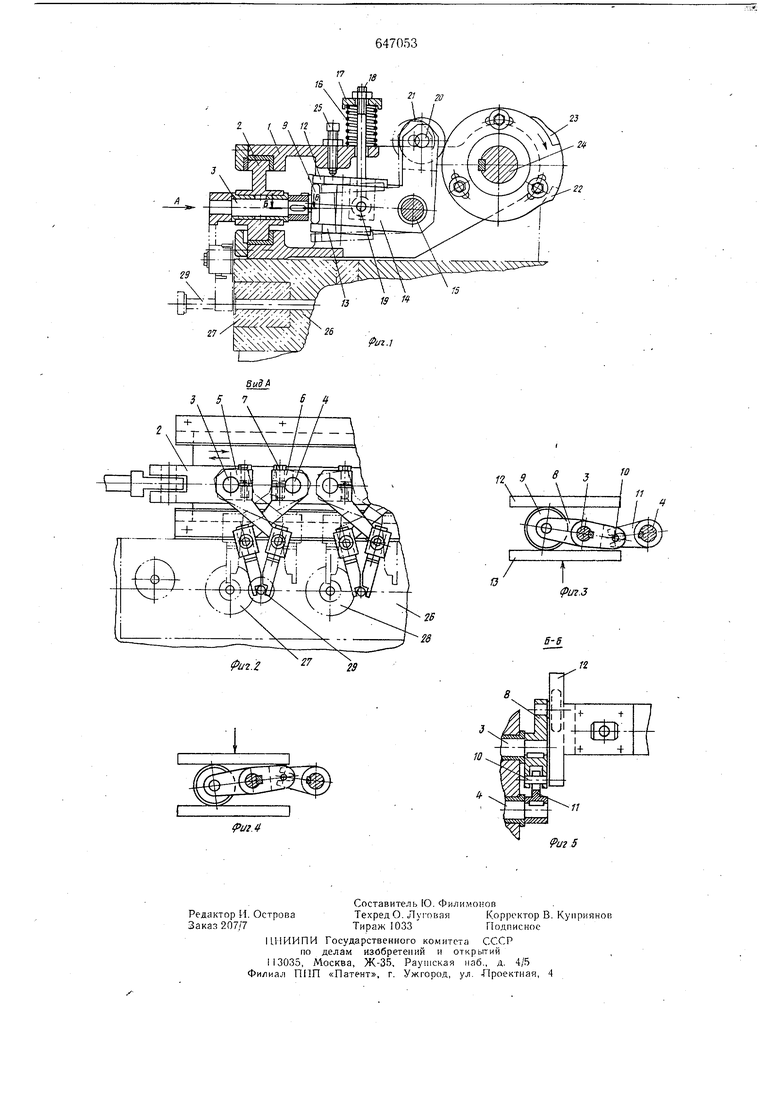
соединен с вилкой дополнительного рычага 11, установленного на конце оси 4, Ролик, 9 помещен между планками 12 и 13, закрепленными на двуплечем рычаге 14, имеюгцем ось качания 15. Пружина 16, установленная на неподвижном корпусе 1, через шайбу Г7, тягу 18 :иоеь 19 связана с двуплечим рычагом 14, В Двуплечем зычаге 14 на оси 20 расположен ролик 21, который в определенный момент до циклу взаимодействия механизмов автомата контактирует с кулачками 22 и 23, регулируемыми относительно друг друга и установленными на валу 24, получающему вращение от привода автомата. В корпусе I расположен ограничительный винт 25, а в матрично.м .блоке 26 -: щтамповочные позиции 27 и 28. Между рычагами захватов 5 и 6 при переносе поменхается заготовка 29. В .момент захвата заготовки 29 по окончании ее штамповки на позиции 27 двуплечий рычаг 14 под действием пружины 16 пойорачивается вокруг оси 15, и планка 13 через ролик 9 и рычаг 8 поворачивает ось 3 .по часовой стрелке, а ось 4, соединенную с осью 3, через вилку рычага II и осью 10 - против часовой стрелки. Рычаги 5 и 6 поворачиваются вместе с осями 3 и 4 и приближаются к заготовке 29, выталкиваемой из матрицы на позиции 27. Усилие пружины через планку 13, рычаг 8 и соединенные между собой рычаги 5 и 6 замь1кается на заготовке 29. Между торцом ограничительного винта 25 и планкой 12 и.иеется необходимый .для этого зазор. Есть зазор также между роликом 21 и кулачками 22 и 23. При отсутствии заготовки 29 между рычагами захватов 5 и 6 в момент их сближения для предотвращения удара захватов друг о друга служит винт 25, ограничивающий поворот рычага 14 через планку 12. Между роликом 21 и кулачками 22 и 23 при этом остается необходимый зазор. .„Дожончании захвата заготовки 29 рычага.миТиб после полного ее выталкивания из матрицы на позиции 27 каретка 2 от привода автомата получает движение и перемещается в направлении следующей штамповочной позиции 28. При этом рычаги 5 и 6 переносят заготовку 29 на позицию 28. Ролик 9 в момент движения каретки 2, как при прямом, так и при обратном ее ходе, перемещается между планками 12 и 13. При заталкивании заготовки 29 в матрицу на позиции 28 рычаг 14 от кулачка 22 через ролик 21 поворачивается на оси 15 в противоположную сторону и сжимает пружину 16. Планка 12 через ролик 9 и рычаг 8 поворачивает ось 3 против часовой стрелки, а ось 4 соответственно - по часовой стрелке. Рычаги 5 и 6 поворачиваются вместе с осями 3 и 4 И расходятся. Каретка 2 с раскрытыми рь1чагами захватов возвращается на позицию 2 за сле.дующей заготовкой. Цикл повторяется. Устройство позволяет существенно повысить производительность и надежность работы. Формула изобретения Устройство для переноса заготовок к многрпозиционному высадочному автомату, содержащее корпус с размещенной в нем подвижной кареткой с захватами, каждый из которых выполнен в виде закрепленных на осях рычагов с губками, а также щарнирно смонтированный в корпусе двуплечий рычаг, одно плечо которого взаимодействует с кулачковым приводным валом, установленным корпусе, а другое контактирует с помощью подпружиненной относительно корпуса основной планки с роликами, установленными на дополнительных рычагах, закрепленных на осях рычагов захватов, отличающееся тем, что, с целью повышения производительности и надежности работы за счет исключения вибрации захватов, оно снабжено дополнительной планкой, установленной параллельно основной планке и контактирующей с роликами, при этом обе планки жестко связаны с двуплечим рычагом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 430933, кл. В 21 13/08, 1972.

| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННЫХ ХОЛОДНОВЫСАДОЧНЫХ АВТОМАТОВ | 1973 |
|
SU366912A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННОГО ВЫСАДОЧНОГО АВТОМАТАФОНДбис; | 1972 |
|
SU430933A1 |
| Устройство для переноса заготовок к многопозиционному высадочному автомату | 1986 |
|
SU1412874A1 |
| Устройство для переноса заготовок в многопозиционном высадочном автомате | 1980 |
|
SU958031A1 |
| Цепевязальный автомат с кантователем вертикального исполнения | 1986 |
|
SU1383571A1 |
| Автомат для высадки | 1972 |
|
SU471944A1 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| Устройство для перемещения заготовок | 1984 |
|
SU1205973A1 |
| АВТОМАТ ГОРЯЧЕВЫСАДОЧНЬШ ДЛЯ ИЗГОТОВЛЕНИЯ ФАСОННЫХ ДЕТАЛЕЙ, НАПРИМЕР ГАЕК | 1965 |
|
SU176476A1 |
| Устройство для навивки пружин с двумя ветвями противоположного направления | 1983 |
|
SU1097420A2 |