1
Изобретение относится к области траиспортного Машиностроения, а именно к системам уО.равлевия гусенИЧНОЙ машины.
Известны устройства управления бортовым двухступенчатым планетарным механизмом поворота гусеничной машины, содержащие рычаг водителя, связанный тятамн управления с тормозом поворота, блокировочной муфтой и остановочным тор-мозо.м.
В известных устройствах рычаги водителя соединены тягами с разделительным мехализмом, установленным иа мостике управлевия плаиетарньга мехаиизмом поворота. П-ри этом водитель управляет разделительным профильным кулаком, поворач1ивая его, а сам процесс разделения управлением оста1повочным тормозом, тормозом поворота и |блоки,ровочной муфтой осуществляется с помощью рычага с роликом, обкатывающим профильный кулак. Затяжка тормозов при этом осуществляется лружииами, действующими в зависимости от поворота профильного кулачка, и не контролируется водителем. Это прявадит к резкому схватыватгию тормозов, броокам маш.ины при повороте и, .KaiK следст1вие, к большим динамическим .нагрузкам на ходовую часть и тратсмиссию гусеничной машины, кроме того, происходит .недостаточное затягивание тормозов, что приводит К сгоранию тормозных обшивок.
С целью осуществления вод телем контроля усилля затяжки тормозов и обеспечения плавпого поворота машины в предлагаемом стройстве тяга управления тормозом новорота связана с рычагом через сектор, установленный соосно рычагу водителя и фиксируемый относительно него защелкой, взаимодействующей с уступом, выполненным на секторе.
.Кроме того, для удобства управления мащ.иной защелка может быть связана тягой с рукояткой, установленной на рычаге водителя с помощью пальца, ось которого расположе 1а перпенди.кулярно к оси .качания рычага и сектора.
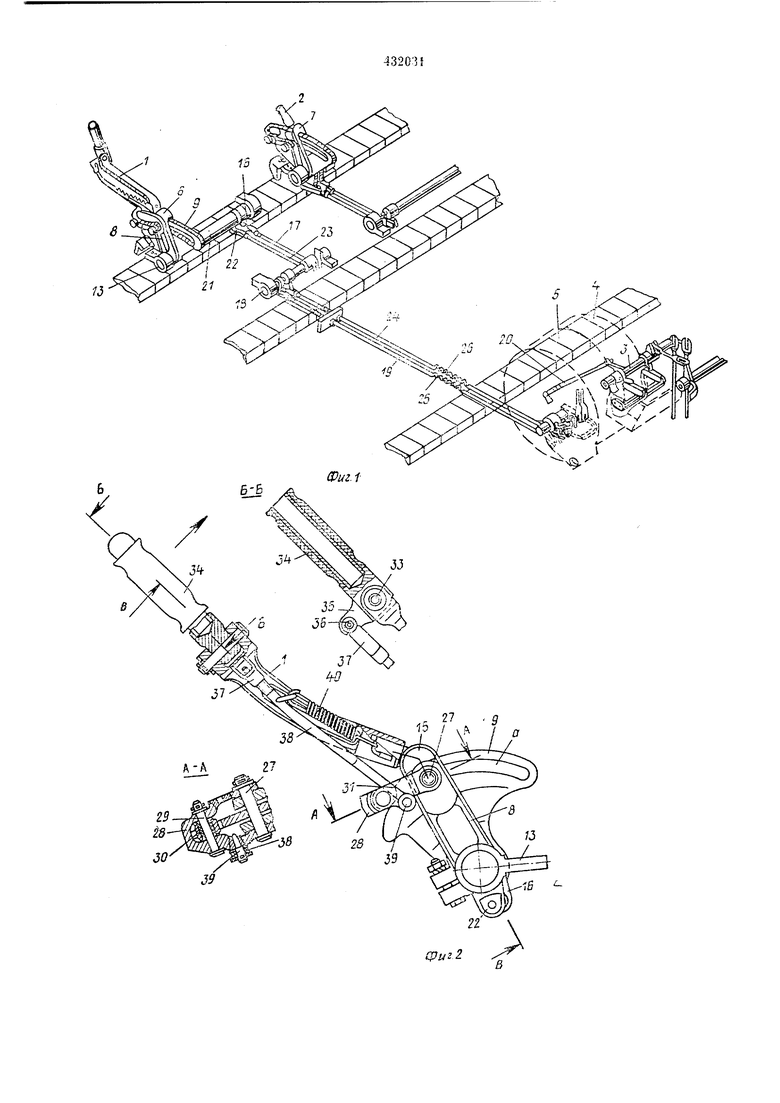
На фиг. 1 локаза.но предлагаемое устройство для управления планетарными механизмами поворота гусеничной машины, общий внд; на фиг. 2 - левый рычаг водителя; на
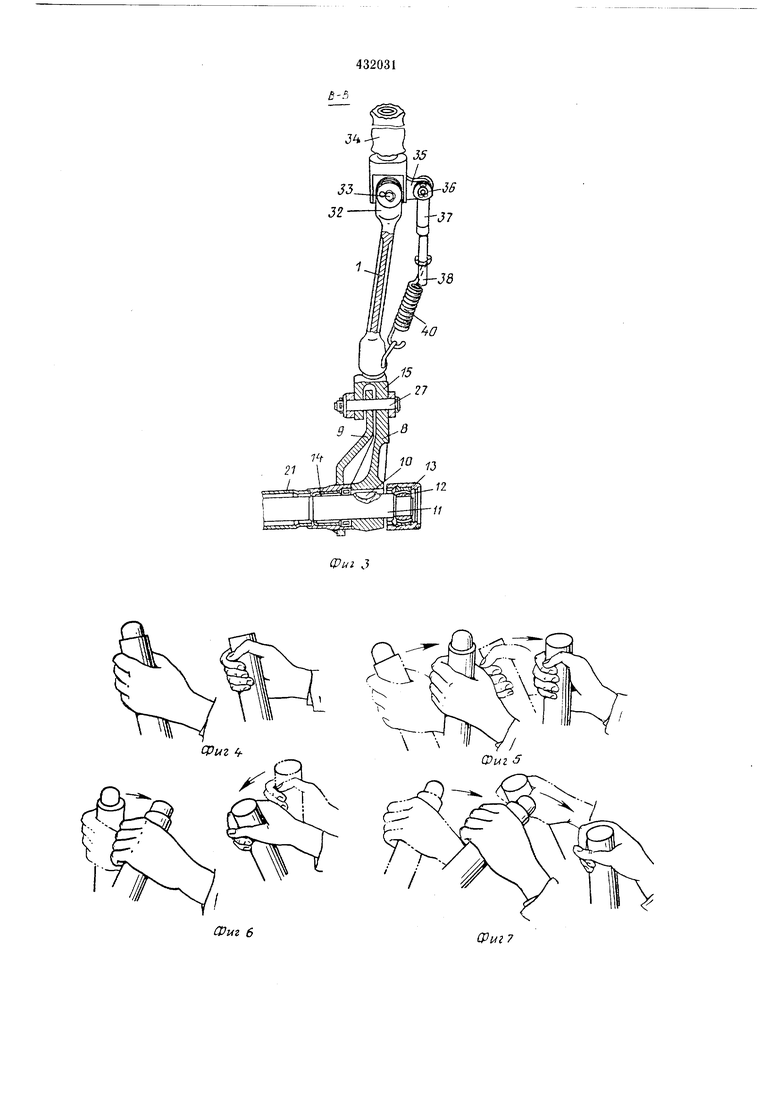
фиг. 3 - разрез по В-В на фиг. 2; на фиг. 4-7 - последовательное положение рукояток рычагов при управлешп поворотом машины.
Устройство для управления планетарными
механизмами поворота содержит левый / и правый 2 рычаги водителя, мостики 3 управления, остановочный тормоз 4, тормоз 5 поворота. На рычагах водителя установлены разделительные механизмы 6 и 7, которые состоят из основания 8 рычага и сектора 9.
Основание 8 рычага установлено с помощью шпокки 10 на валу //, вращающемся на подщип-никах 12 в опорах 13, прнчем на этом же р.рлу установлен на нгольчатых подшипниках М с&ктор 9. Одмо плечо /5 осиоза.ния 8 рычага приварено к рычагу / водителя, а другое- 16 чере, тягу 17, промежуточный вал 18, тягу 19 и систему ры1чагов и тяг соединено е приводом остановочного тормоза 4 и тягой 20 выключения блокиров.очной муфты. Плечо 15 охватывает сектор 9 с двух сторон, который соединен жестко через полый вал 21 с рычагом 22, который в свою очередь, через систему тяг 23 и 24 и промежуточный вал IS соединен с МОСТН.КОМ 3 управления и далее с тормозом 5 поворота, прн этом на тягах 19 и 24 установлены оттяжные Пружины 25 и 26. В .плече 15 установлен палец 27, на котором свободно поворачивается защелка 28, причем .палец 27 проходит сквозь прорезь а в секторе 9. В защелке 28 Па пальце 29 уста|Н01Влен ролик 30, контактирующий с сектором, в передней части которого выполнен уступ 5/- Рычаг / водителя имеет на своем верхнем конце вилку 32 и палец 33, ,на которых установлена рукояпка 34, причем ось пальца 33 перпендикулярна оси вала //. Р теоятка 34 имеет рычаг 35, который связал с помощью пальца 36, ,в,илки 37, ТЯ1ГИ 38 и пальца 39 с защелкой 28. Между тягой 38 и рычагом водителя устачювлена Прул Н1на 40 растяжения, поджимающая ролИК 30 защелки 28 к сектору 9.
Устройство работает следующим образом.
Для того, чтОбы повернуть гусеничную машину, .-напр.имер, влево, водитель тя,нет рукоятку 34 на себя (см. ф.иг. 4), рычаг / водителя и связанное с ним жестко основание 5 рычага поворачиваются и воздействуют через .плечо 16 на тягу 17, далее через промежуточный вал 18 и тягу 19 .на рычаги мостика 3 управления и тягу 20. При этом выключается блокировочная муфта, но остановочный тормоз не включается благодаря специально выполнеивому больщому зазору в его приводе. При повороте основания 8 рычага устансвлениая на нем защелка 28 через ролик 30 упирается в уступ 31 и поворачивает сектор 9, который взаимодействует через рычаг 22, тягу 23, промежуточный вал 18 и тягу 24 .на рычаг мости ка 3 управлен.ия. При этом затягивается тормоз поворота. Гусеничная .мащииа начинает поворачиваться влево благодаря ,измеиен.ному передаточному числу в левом планетарном механизме поворота. Усилие затянски то.рмоза поворота создается водителем в зависимости от требуемого радиуса и плавности .входа машины в .поворот.
Таким образом водитель реально ощущает и ре гулирует плавность затажки тормозов поворота, что позволяет производить .поворот с контролируемыми водителем угловыми ускорениями.
В тех случаях, когда необходимо произвести поворот машины с меньшим радиусом вплоть до радиуса, равного расстоянию между гусени1цами, водитель поварачивает рукоятку 34, например, левого рычага вправо (ом. фиг. 5) и продолжает тянуть ее на себя (см. фиг. 6). При этом связа.нный с рукояткой рычаг 35 с помощью тяги 38 .поднимает защелку 28, сектор 9 освобождается благодаря
.оттянутой пруж.ине 26 и .возвращается в исходное положение, при этом тормоз 5 поворота выключается.
Рычаг / во.дителя продолжает движение и через систему тяг и рычагов воздействует на
мости;к 3 управления.
Блокировоч.ная муфта продолжает оставаться выключенной благодаря специально выполненному зазору в приво.де о.ста1новочного тормоза, в результате последний затят.ивается, при этом водителем осуществляется контроль усилия затяжки, что (позволяет выполнять поворот машины с неойходимыми угловыми скоростями. После прекращения поворота оттяжная пружина 25 возвращает рычаг
водителя в .исходное положение.
Предлагаемое, устройство управления позволяет также осуществлять .движение мащины на понижеганой скорости, в этом случае оба рычага, левый и правый, поворачиваются
водителем к себе, в результате чего затягиваются то.рмоза поворота на обоих планетарных механизмах поворота, и ма1Ш.ина движется с пониженной скоростью. Для того, чтобы повернуть машину в этом режиме движения, водитель поворачивает р укоятку одного из рычаго.в внутрь и тянет его на себя. При этом затягивается оста новомный тормоз одного планетарного механизма .поворота, .и позорач 1вается при контроле ее поворота водителем.
Предмет изобретения
1.Устройство для управления бортовьш двухступенчатым пла.нета:рны М механизмом
.поворота .гусеничной машины, содержащее рычаг водителя, связан.ный тягами с тормозом поворота, блокировоч.ной муфтой и остановочиым тормозом, отличающееся тем, что, с целью обеспечения возмож1ИОСти контроля усилия затял ки тормозов в одителем и осуществления плавного поворота ма.шины, тяга управления тормозам пов.орота связана с рычагом водителя через сектор, установленный
соосно рычагу во.дителя и фиксируемый относительно него защелкой, взаимодействующей с уступом, выполненным на секторе.
2.Устройство по п. 1, отличающееся тем, что, с целью удобства управления машиной,
защелка .связана тягой с рукояткой, установленной на рычаге водителя с помощью пальца, ось которого расположена перпенди куляр.;.о к оси качания рычага и сектора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления двухступенчатым планетарным механизмом поворота гусеничной машины | 1988 |
|
SU1594045A1 |
| Система управления гусеничного транспортного средства | 1986 |
|
SU1390113A1 |
| Механизм управления тормозами гусеничной машины | 1987 |
|
SU1533931A1 |
| Привод управления тормозами гусеничной машины с приводом растормаживания | 2022 |
|
RU2794602C1 |
| Механизм управления поворотом гусеничной машины | 1987 |
|
SU1390114A1 |
| Система управления гусеничной машины | 1986 |
|
SU1426883A1 |
| Устройство управления гусеничной машиной | 1981 |
|
SU958196A1 |
| ГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД УПРАВЛЕНИЯ | 1970 |
|
SU260434A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ СТУПЕНЧАТОЙ ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО БЛОКИРОВКИ МЕХАНИЗМА ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ ЭТОЙ СИСТЕМЫ | 2009 |
|
RU2409782C2 |
| РУКОЯТКА СТОЯНОЧНОГО ТОРМОЗА | 2021 |
|
RU2795182C2 |