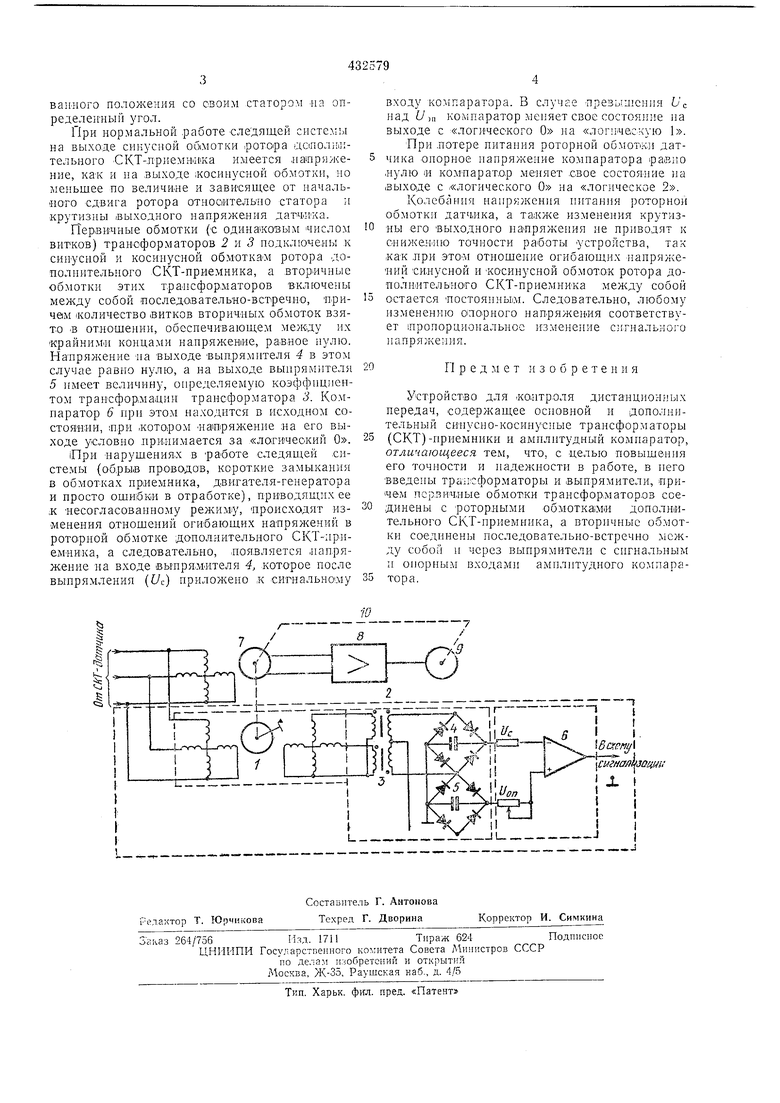
Устройство относится -к области автоматического ашнтроля систем управления и может быть использовано для .контроля дистанционных передач угла. Известны устройства для выявлелия рассогласования датчика сину.сно-косинусного трансформатора (СКТ)-.прием1НИка, содержащие iKpoiMC датчика, СКТ-приемяи.ка и следящей системы дополнительный СКТ-приемтшк, закрепленный на одной оси с основным СКТприемником; роторная обмотка доиолиительного СКТ-лриемни;ка соединена с амнлитудным компаратором. Статорные обмотки дополнительного . Включены в цепь основного СКТ-приемвика, а с роторной обмот;ки дополнительного СКТ-триемнека при неисправности в следящей системе снимается сигнал рассогласования. Однако такие устройства имеют низкую точность контроля в условиях дестабилизирующих факторов - изменения напряжения питания роторной обмот1ки датчика следящей системы и изменения напрузки на датчик в процессе работы, приводящих к изменению крутизны выходного напряжения датчика. Кроме того, 1при потере -питания роторной обмотки датчика следящей системы (в аварийных ситуациях) устройства, вообще, не работоспособны, так как в роторной обмотке дополнительного СКТ-приемника не наводится э.д.с. Цель изобретения - иовыщение точности и надежности устройства в работе. Для этого В устройство введены трансформаторы и выпрямители. При этом первичные обмотки трансформаторов соединены с роторньБми обмотками дополнительного СКТ-нриемника, а вторичные обмотки трансформаторов соединень встречно-последовательно между собой и через выпрямители с сигнальным и опорным входами ЯМПлитудного комнаратора. На чертеже показана принцпниальная электрическая схема дредлагаемого устройства. Устройство содержит дополнительный СКТ-лриемник /, трансформаторы 2, 3 и выпрямители 4, 5, а.мплитудный компаратор 6, основной СКТ-приемннк 7, усилитель 8 следящей системы и двигатель-генератор 9 с редуктором 10. Роторы основного и дополнительного СКТприемников за.креплены на одной общей оси i отрабатываются в согласованное положение через редуктор 10 двигателем-генератором 9, поскольку статор основного СКТ-приемника подключен к датчику. Статор дополнительного СКТ-нриемника тоже подключен к датчику, а его ротор 1сдвчнут относительно согласо
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления | 1973 |
|
SU482718A1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Следящая система | 1981 |
|
SU999014A1 |
| СЛЕДЯЩАЯ СИСТЕМА С КОНТРОЛЕМ ИСПРАВНОСТИ | 1973 |
|
SU383008A1 |
| Устройство для контроля подшипников электродвигателя | 1985 |
|
SU1276943A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для формирования сигнала регистрируемого параметра,представленного углом поворота ротора вращающегося трансформатора | 1981 |
|
SU972215A1 |
| Устройство для измерения рассогласования следящих систем | 1982 |
|
SU1065865A1 |
| Измеритель углового рассогласования и его производной для следящих систем | 1975 |
|
SU600518A1 |
