Изобретение отиоситея к устройствал для передвижения деталей е помощью захватов и может быть применено в различны.х отраслях техники, например при обработке деталей на автоматических линиях, в случаях, когда на пути передвижения деталей имею.тся препятствия.
Известны устройства для перемещения деталей, например автооператоры, механическая рука которых соединена с приводом возвратно-поступательного перемещения и поворота с помощью Н1танги.
Цель изобретения - обеспечение возможности обхода препятствий, имеющих значительную высоту.
Для этого внутри штанги смонтирована рейка, взаимодействующая с выполненным в виде зубчатого сектора хвостовиком exaнической руки, нгарнирно прикрепленной к игганге.
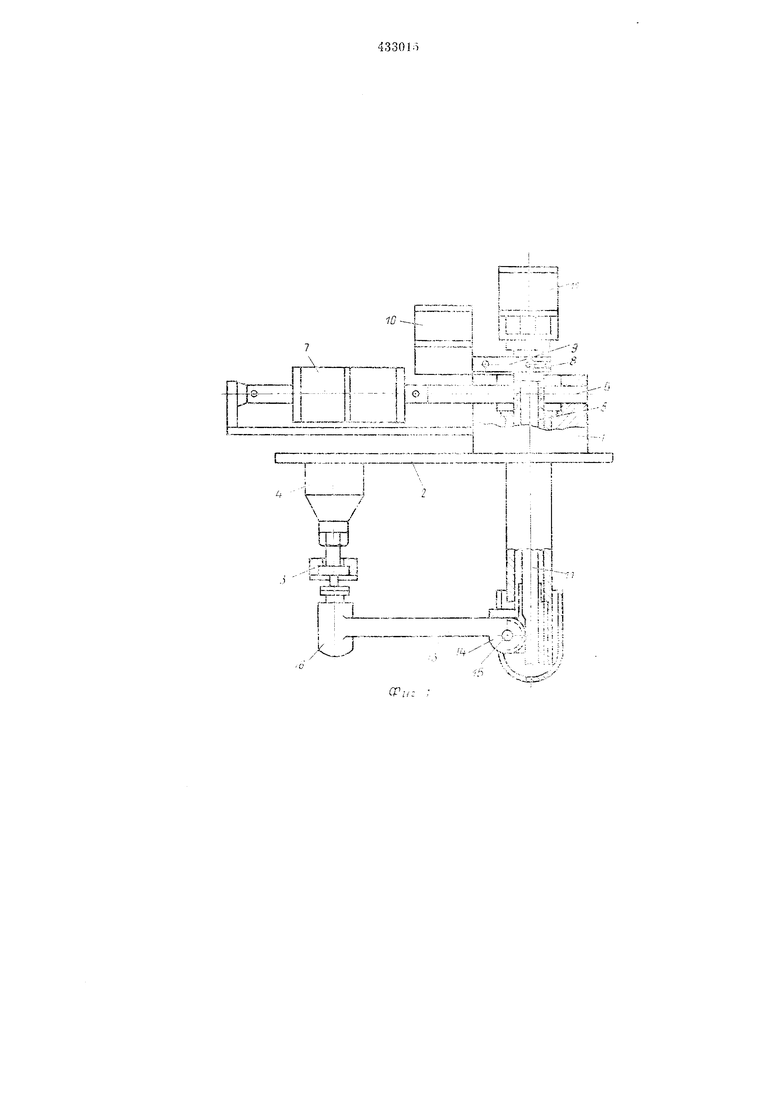
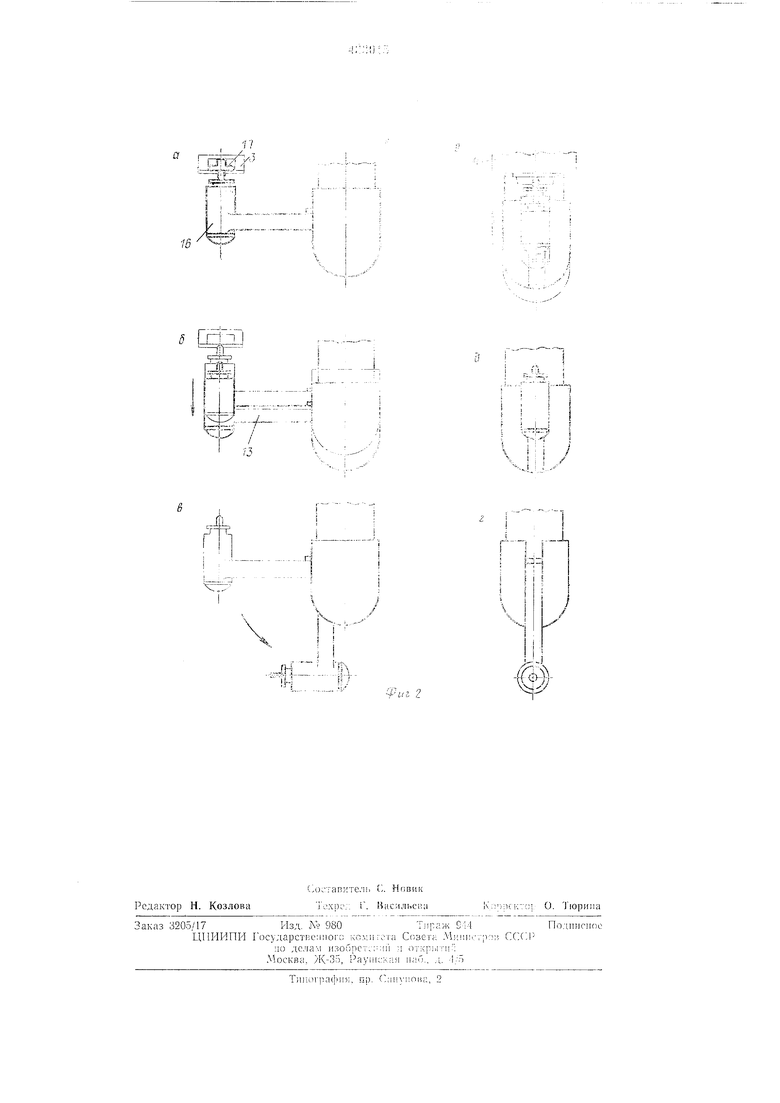
На фиг. 1 изображен предлагаемы ; автооператор, разрез; на фиг. 2 - положения механической руки автооператора в процессе перемещения обрабатываемо детали по рабочим позициям.
Корпус I автооператора прнкренле к монтажпой плите 2, к которой прикреплены также питатель 3 для подачи деталей и приснособление 4 для крепления деталей при обработке.
2
В корпусе 1 установлена полая штанга 5, выполненная в виде вала-щестернн, соединенной с помощью рейки 6 со спаренным цилиндром 7 двойного действия. Штанга 5 имеет кольцевую выточку 8, в которой установлена вилка 9, щарнирно прикрепленная к корпусу 1 и соединенная с поргннем пневмоцилиндра 10 двойного действия, также прикрепленного к корпусу 1. Внутри штанги 5 укреплена с возможностью осевого неремещення рейка 11, один конец которой соединен с порщнем пневмоцилиндра 12 двойного действия, прикрепленного к щтанге 5, а другой взаимодействует с хвостовиком механической руки 13, выполненным в виде зубчатого сектора 14. Механическая рука прикреплена к щтанге 5 с помощью шарнира 15. На механической руке 13 консольно закреплен цанговый захват 16, захватывающий деталь 17.
Работа автооператора поясняется на примере, когда для переноса обрабатываемой детали с одной позиции на другую необходим поворот механической руки на 90° и при этом требуется обойти высокое препятствие, расположенное указанными позициями.
В тот момент, когда механическая рука 13 расположена у питателя 3 (см. фиг. 2, а), толкатель последнего подает обрабатываемую деталь 17 в захват 16. Затем в камеру прямого хода пневмоцилиндра 10 подается 3 воздух, в результате чего вилка 8 поворачивастся по часовой стрелке. При этом штанга 5 совместно с цилиндром 12, рейкой 11 и ме-ханической рукой 13 перемещается «инз, отводя захват 16 с деталью 17 от питателя 35 (см. фиг. 2,6). Зател: в прямого хода пневмоцилиндра 12 подается воздух, в результате чего рейка 11 поднимается вверх, новорачивая сектор 14 вокруг гиарнира 15 против часовой стрелки (см. фиг. 2,е). В рас-ю сматриваемом случае механическая рука 13 поворачивается на 90. После этого воздух подается в паевмоцилиндр 7. В зависимости от того, в какие камеры цилиндра 7 подай воздух, рейка G пе-15 ремещаетс либо вправо, либо B;ICBO. Ппи этом штанга 5 совместно с рейкой 11, механической рукой 13, захватом 16 и деталью 17 совершит поворот на 90° вокруг оси и танги 5 (см. фпг. 2,г). В рассматриваемом случае20 этот поворот выполнен но часовой стрелке (если смотреть снизу). В дальнейшем воздух нодается в камеру обратного хода нневмоцилиидра ;2, в результате чего рейка 11 опускается, поворачи-25 вая мехаиическую руку 13 иа 9С :СА:, фпг. 2,д). Затем воздух годае1ся в кал ного хода ппевмоцилнндра 10, бл; му BH;ii a 8 подпппает п тап , 3 v. рейкой И, меха1П1чсской v. ;3 16, подавая тем еамым деииИ) 7 vpi:(:n(;Cfi блепию 4 (с.м. с|5иг. 2,е). 4 i ;.1 ;сл:-lu мь/ i.ч:ii rxuii рухч i от iipnсг1особлсл 1л ; к ипателю о происходит анаЛ01 1чио оимсашюму. по в сбратпой чос.тсдоватсльносги, Если иесо ;одимо повернуть механическую руку 13 пз положения л в диаметрально прстивоколожпсс положение г, то воздух подается в соответствующие камеры цилиндра 7. в рез ччьт;;т( чего нл:е1яе;Чя ьапргьлоиие перед еще11пя ройки G. а следовательно, направление ипвоио/а ibianvH 5. Поскольку автопьератор сбесп /чпваег возможносгь неромспцепия деталей с одио11 рабочей пс-мпиш на другую с обходом репя:стзкй зиачп-слг.;ой 1ысоты, то создается возможност;; более рациопальпого размеихения аппвратури п прпс;:ос(;блснпй на автоматических лпи1И;х, что делает их боле иыми. II о с, мет п в ij б о е е н Лвтосператор, меканп еская соединена с приводом возврата, иого псрсппоплсып: п : оо;; 1П;-ли:п, о ; л п ч а ю ти: и с и хвостовпхо,: ;,ла1 П:ес1и)й :па;)п;
МШ
.:-l
,-. i ; ;i
, ;::i.
ff//: :
Cjfef
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1982 |
|
SU1186077A3 |
| Манипулятор для дозированной загрузки емкости сыпучим материалом | 1985 |
|
SU1281399A1 |
| Загрузчик стеклоизделий | 1976 |
|
SU695976A1 |
| АВТООПЕРАТОР | 1973 |
|
SU368007A1 |
| ЗАГРУЗЧИК СТЕКЛОИЗДЕЛИЙ | 1971 |
|
SU301314A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ ТИПА ВАЛОВ ИЛИ СТАКАНОВ | 1969 |
|
SU237539A1 |
| Устройство для тренировки пловцов | 1986 |
|
SU1395343A1 |
| СЪЕМНИК ДЛЯ ЗАХВАТА, СЪЕМА, УДАЛЕНИЯ ИЗ РАБОЧЕЙ ЗОНЫ И УКЛАДКИ ДЕТАЛЕЙ9 '~*S^f"^f~^ 1-'~' О ' ' f. О 5 Wtv/V ! - -• v-' PI -• <. !•5 ^ff'fffl^ft у- .; ;.i;;>&!;:;•! • isu"» :'.'..?'• | 1973 |
|
SU373127A1 |
| АВТООПЕРАТОР | 1969 |
|
SU255745A1 |
| Манипулятор | 1980 |
|
SU908588A1 |
5 Щ Si
Е::.-/
-Jllx
/
7 Z
J
fi-j
111
