1
Изобретение относится к машиностроению и может быть использовано при автоматизации различных производственных процессов.
Известны транспортные роторы с вращающимся на валу барабаном с захватами, управляемыми от копира с изменяемым профилем.
С целью захвата длинномерных прутков и их продольного перемещения предлагаемый ротор выполнен в виде нескольких расположенных ярусами барабанов с захватами, из которых на первом по движению прутка барабане смонтированы приводные ролики, обеспечивающие подачу сигнала на изменение нрофиля копира при отсутствии в них прутка.
Одноименные захваты всех ярусов кинематически связапы со штангой, поворачиваемой от копира.
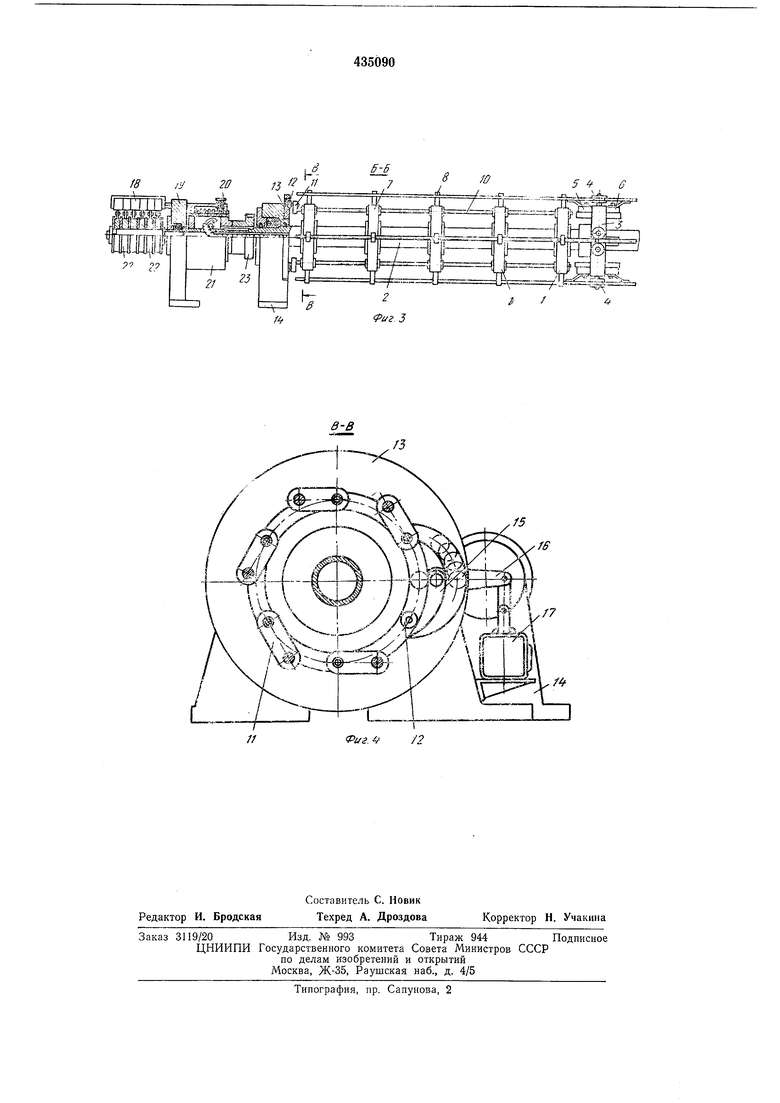
На фиг. I изображен транспортный ротор при загрузке его прутками, общий вид; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - разрез по Б-Б на фиг. 1; на фиг. 4 - разрез по В-В на фиг. 3.
Транспортный ротор .представляет собой несколько барабанов 1, расположенных ярусами на центральном валу 2. На валу на первом по движению прутка барабане закреплена опора 3, несущая приводные ролики 4 и концевые выключатели 5 и 6. Каждый
барабан состоит из корпуса 7, в котором крепятся подвижные захваты 8 (фиг. 2, 3). Зубчатые секторы 9 закреплены на штанге 10, проходящей через все барабаны и имеющей на конце планку И и ролик 12, входящий в кольцевой паз копира 13, установленного на опоре 14. Копир содержит переключаемую стрелку 15, рычаг 16 правления для освобождения дугообразного паза и перекрытия
кольцевого паза копира. Рычаг управления соединен с электромагнитом 17, который связан с концевыми выключателями 18, закрепленными на опоре 19, и токосъемником 20, закрепленным в корпусе 21. На центральном
валу 2 установлены кулачки 22, смещенные относительно друг друга на определенный угол (в зависимости от количества захватов в каждом корпусе 7), которые соприкасаются с концевыми выключателями 18. Приводная
шестерня 23 через паразитную шестерню 24 и ведомую шестерню 25 передает вращение валу 26 подающего конвейера 27. На :пем смонтированы несущие планки 28, на которых закреплены клещи 29 с передаваемыми прутками 30, различного профиля.
Работа ротора осущесгвлпстсп следующим образом.
Длинномерные прутки 30 различных профилей (круглого, квадратного, трехгранного
и т. д.) закладываются в клещи 29, медленно 3 вращающегося подающего конвейера, кинематическая цепь привода которого рассчитана так, что клещи 29, несущие пруток строго определенного профиля, и подвижные захваты 8, захватывающие пруток только данного про-5 филя, всегда встречаются на линии, соединяющей центры валов 2 и 26. КоБцевые выключатели 5 и 6 служат для подачи команды на захват нового прутка, когда предыдущий пруток полностью подан 0 приводными роликами 4 па дальнейшие oneрации. Концевой выключатель 5, установленный до приводных роликов, определяет наличие прутка 30 в захватах 8, а концевой выключатель 6, установленный за приводными15 роликами, дает команду при выходе прутка из роликов 4. Концевые выключатели 5 и 6 работают своими нормально закрытыми контактами. Питание к ним подается через кольцевой токосъемник 20 и концевые выключа-20 тели 18. Выходные концы с этих выключателей соединены параллельно и идут на электромагнит 17, который управляет стрелкой 15. Вращение от центрального вала 2 через ведущую щестерню 23, паразитную шестерню25 24 и ведомую щестерню 25 передается валу 26 подающего конвейера 27, который вращается € меньшей скоростью, чем вал 2. При втянутых захватах 8 между центрами прутков 30, лежащих в клещах 29 подающего30 конвейера, и центрами прутков 30, лежащих в захватах 8, имеется определенное расстояние /, необходимое для свободного прохождения последних мимо прутков 30, лежащих в захватах подающего конвейера. Кроме35 того, подвижные захваты 8 смещены относительно клещей 29 на некоторое расстояние вдоль оси прутка, что исключает возможность их соприкосновения во время приема прутка. Если предыдущий пруток полностью подан40 роликами 4, то КОНцевые выключатели 5 и 6 отпускаются, и при вращении центрального вала 2 кулачок 22 замыкает концевой выключатель 18. Электромагнит 17 замыкается и воздействует через рычаг 16 управления на45 переключаемую стрелку15. Стрелка 15, поворачиваясь, перекрывает кольцевой паз копира 13 (фиг. 4) и заставляет ролик 12 перемещаться по дугообразному пазу копира, который рассчитан так,50 что при прохождении по нему ролика 12 он обеспечивает поворот планки 11 и штанги 10. 4 В свою очередь, зубчатые секторы 9 (фиг. 2) поворачиваются и перемещают подвижные захваты 8 на расстояние /. Так как кинематическая цепь рассчитана на то, чтобы клещи 29 и подвижные захваты 8 всегда встречались на линии, соединяющей центры валов 2 и 26, то подвижные захваты 8 вследствие большей скорости вращения догоняют пруток, лежащий в клещах 29, и подхватывают его. При дальнейшем вращении захваты 8 втягивают пруток в рабочие барабаны 1, одновременно вкладывая его в приводные ролики 4. Принятый пруток в подвижных захватах 8 лежит свободно и в то же время не выпадает, так как он в них защелкнут; приводные ролики 4 подают пруток. |К.онцевые выключатели 5 и 6 при этом замыкаются и полностью исключают повторный выход подвижных захватов 8 на захват следующего прутка до полного выхода обрабатываемого прутка из роликов 4. При замыкании кольцевых выключателей 5 и 6 цепь электромагнита 17 разрывается, переключаемая стрелка 15 освобождает кольцевой паз копира 13, и ролик 12 свободно перемещается по пазу, не вызывая поворота штанги 10. Пруток 30 полностью выходит из ручья роликов 4 за определенное количество оборотов рабочего барабана, при этом подвил ные захваты 8 до израсходования прутка не совершают никаких перемещений и не соприкасаются с другими прутками, лежащими в клещах 29 подающего конвейера 27. „ , Предмет изобретения 1. Транспортный ротор автоматической роторной линии, снабженный вращающимся на валу барабаном с захватами, управляемыми от копира с изменяемым профилем, отличающийся тем, что, с целью обеспечения захвата длинномерных прутков и их продольного перемещения, ротор выполнен в виде нескольких, расположенных ярусами барабанов с захватами, из которых на первом по движению прутка барабане смонтированы приводные ролики, служащие для подачи сигнала на изменение профиля копира при отсутствии в них прутка. 2. Ротор по п. 1, отличающийся тем, что одноименные захваты всех ярусов кинематически связаны со штангой, поворачиваемой от копира.
29 ti -

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ НАПИЛЬНИКОВ | 1971 |
|
SU426735A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Гибкий производственный модуль для резки заготовок из прутков круглого и квадратного проката | 1986 |
|
SU1431915A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ НЕПРЕРЫВНОЙ ПРАВКИ, РЕЗКИ, КОНТРОЛЯ НА НАЛИЧИЕ ПОВЕРХНОСТНЫХ ДЕФЕКТОВ И МАРКИ СТАЛИ ИЛИ ТВЕРДОСТИ МЕТАЛЛИЧЕСКИХ ПРУТКОВ | 1966 |
|
SU184589A1 |
| УЛЬТРАЗВУКОВАЯ УСТАНОВКА | 1972 |
|
SU347371A1 |
| АВТОМАТ ГОРЯЧЕВЫСАДОЧНЬШ ДЛЯ ИЗГОТОВЛЕНИЯ ФАСОННЫХ ДЕТАЛЕЙ, НАПРИМЕР ГАЕК | 1965 |
|
SU176476A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА | 1973 |
|
SU406787A1 |
| МОЙКИ СТЕКЛЯННЫХ БАНОК | 1970 |
|
SU265742A1 |
| Роторно-конвейерная машина | 1986 |
|
SU1404274A1 |

//
/5
fff
Риг. 4
