1
Изобретение относится к оборудованию для производства керамических изделий и может быть применено в других отраслях народного хозяйства, например, в металлообрабатывающей промышленности, где есть необходимость в а;втоматизированном процессе передачи штучных изделий на конвейер для группирования изделий В пакет или дальнейшего транспортирования со строго определенным промежутком между изделиями.
Известно устройство для перекладки штучных изделий, содержавшее конвейер с ведущей звездочкой и валом, раму с захватами и привод.
Однако известное устройство громоздко и не обеспечивает синхронность загрузки конвейера.
Целью изобретения является снижение габаритов установки и повышение синхронности ее работы.
Для этого в предложенном устройстве рама выполнена в виде П-образного рычага, засаженного на вал, который смонтирован соосно внутри вала конвейера и снабжен храповым механизмом с собачкой, установленным на раме и звездочках конвейера, причем в качестве привода применен силовой цилиндр, шток которого закреплен на установленных на раме толкателях. Кроме того, собачка храпового механизма выполнена в виде двуплечего рычага, опирающегося одним концом на закрепленный на толкателе упор, а другим взаимодействующего с зубьями храпового устройства, образованными смонтированными на валу конвейера пальцами.
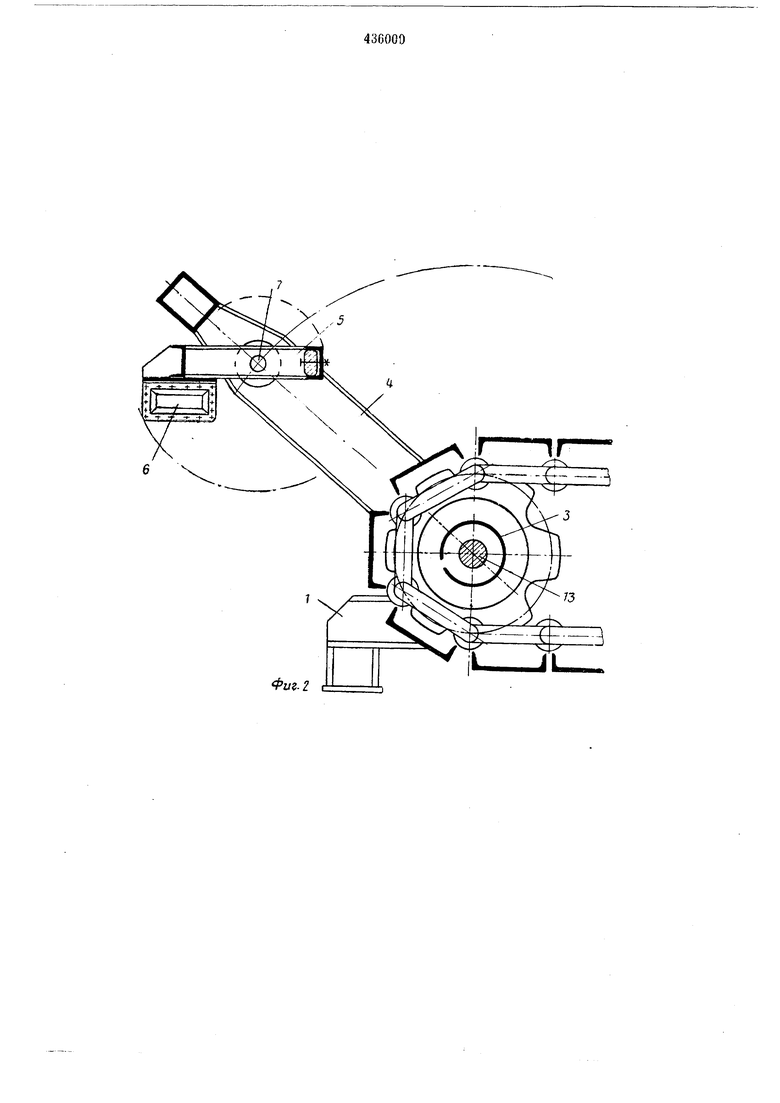
На фиг. 1 показано предложенное устройство, вид сбоку и в плане; на фиг. 2-рама с захватами; на фиг. 3-узел валов транспортера и рамы; на фиг. 4-узел храпового мехапизма.
Устройство представляет собой установленный на опорной раме 1 пластинчатый конвейер 2 с соосно расположенными по концам обоих своих валов 3 П-образными качающимися рамами 4, снабженными поворотными рамками 5 пневмозажимами 6 для штучных однородных изделий, установленными шарнирно внутри рамы. На полуоси 7 поворотной рамки, выходящей за раму с обеих сторон,
жестко посажены звездочки 8 цепных передач 9, приводящих в движение рамку с пневмозажимами. Цепные передачи охватывают звездочки рамки и невращающиеся звездочки 10, установленные на опорах 1 качения
рамы соосно.
Полые валы конвейера с насаженными на них звездочками 12 опираются на проходящие сквозь них валы 13 рам через подшипники 14. Валы П-образных рам замыкаются
тягами 15. Одна из тяг соединена со штоком
гидроцилиндра 16, приводящего в действие и раму, и конвейер. Вал рамы опирается своими концами через подшипниковые опоры на станины 17.
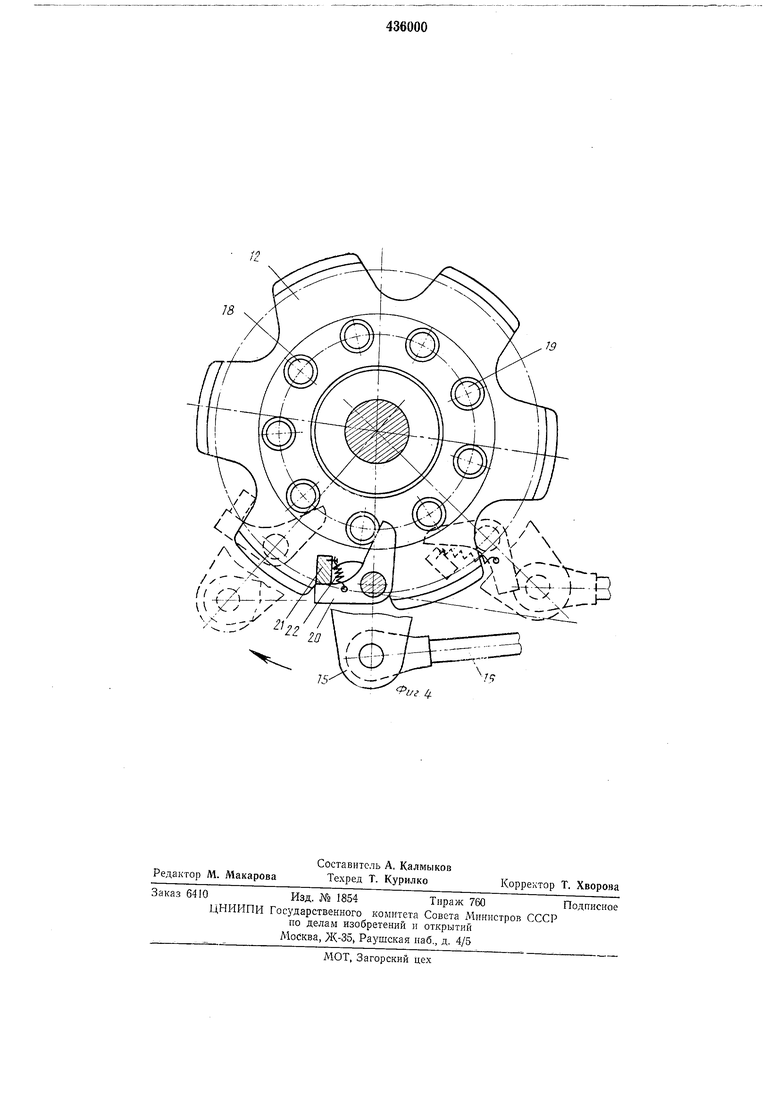
На звездочках вала конвейера со стороны концов вала концентрично расположен ряд пальцев 18 с роликами 19, соответствующий шагу установки изделий на конвейере.
Тяги рам несут яа себе поворотную собачку 20 и упор 21, установленные на тяге и связанные между собой пружиной 22 возврата.
Поворотная собачка 20 представляет собой двуплечий рычаг, одно плечо которого воздействует на очередной палец 18 эвездочки 12, а другое - опирается на упор 21 во время работы конвейера 2 или удерживается пружиной 22 возврата ъ остальные промежутки -времени.
Во время работы устройства одна из рам 4 находится в нерабочем положении с отведенными и застопоренными новоротными собачками 20 таким образом, что пальцы 18 поворачивающихся звездочек 12 конвейера 2 пе касаются отведенных собачек.
Работающая рама 4 в своем крайнем положении при максимальном вылете за конвейер-накопитель 2 захватывает пневмозажимами 6 ряд изделий. Включается гидроцилиндр 16 и, воздействуя на тягу 15 рамы 4, приводит последнюю в действие. Рама, поворачиваясь вокруг своей оси 13 качания, поднимает пакет изделий (ряд кирпичей) и переносит их на конвейер 2. Приблизительно на полпути хода рамы 4 в положении последнего, близком к вертикальному, поворотная собачка 20 на тяге 15 рамы одним из своих концов начинает давить на палец 18 звездочки 12 конвейера 2, а другим-опирается на упор 21 на тяге 15. С этого момента начинает двигаться настил конвейера, приче м рама, перейдя свое вертикальное положение, совместно с рамкой 5 с пневмозажимами 6 и рядом изделий в них, начинает создавать благоприятный момент для своего дальнейшего хода и хода настила конвейера 2. Донеся изделия до настила конвейера, рама 4 останавливается и одновременно останавливается настил конвейера, пневмозажимы разжимаются, отпуская изделия, и рама начинает свой обратный ход. При обратном ходе рамы поворотная собачка,
встречая на пути своей тыльной стороной па лец 18 звездочки J2 конвейера 2, легко про скальзывает по нему, поворачиваясь aoKpyiсвоей оси и удерживаясь пружиной 22 возврата в контролируемом положении, заходит за
него и доходит до следующего пальца 18, но не заходит за него. После захвата пневмозажимами 6 очередной партии изделий и начала нового рабочего хода рамы 4 поворотная собачка 20, двигаясь вместе с тягой J5 рамы,
доходит до пальца 18 за который зашла прн 0:братном ходе рамы, и, воздействуя на него, снова смещает настил конвейера 2 на оДин шаг, соответствующий шагу установки пальцев 18 на звездочке 12.
Таким образом поставленная ранее на настил конвейера партия изделий смещается на шаг от следующей парти.и.
Предмет изобретения
1. Устройство для перекладки штучных изделий, например кирпича, содержащее конвейер iC ведущей звездочкой и валом, с захватами и привод, от.шчающееся тем, что,
с целью снижения габаритов установки и повышения синхронности ее работы, рама выполнена в виде П-образного рычага, насаженного на вал, который смонтирован соосно внутри вала конвейера и снабжен храповым
механизмом с собачкой, установленным на раме и 31вездочках конвейера, причем в качестве привода применен силовой цилиндр, щток которого закреплен на установленных на раме толкателях.
2. Устройство по п. 1, отличающееся тем, что СО-бачка храпового механизма вьшолнена в виде двуплечего рычага, опирающего одним концом на закрепленный на толкателе упор, а другим взаимодействующего с зубьями хранового устройства, образованными смонтированными на валу вонвейера пальцами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| Конвейер-накопитель для длинномерных изделий | 1985 |
|
SU1316940A1 |
| Многопозиционный штамп для обработки штучных заготовок | 1980 |
|
SU940950A1 |
| Пульсирующий конвейер с регулируемым шагом | 1981 |
|
SU988691A1 |
| Устройство для выгрузки кормов из башен | 1984 |
|
SU1192716A1 |
| Садчик кирпича на печные вагонетки | 1988 |
|
SU1622132A1 |
| Линия формирования садки сырца-кирпича на печную вагонетку | 1987 |
|
SU1412975A1 |
| Устройство для перекладки изделий | 1980 |
|
SU893805A2 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |


LLbj- Фиг. 2 t
/2
фиг 3
/t
19
/Т
iff
