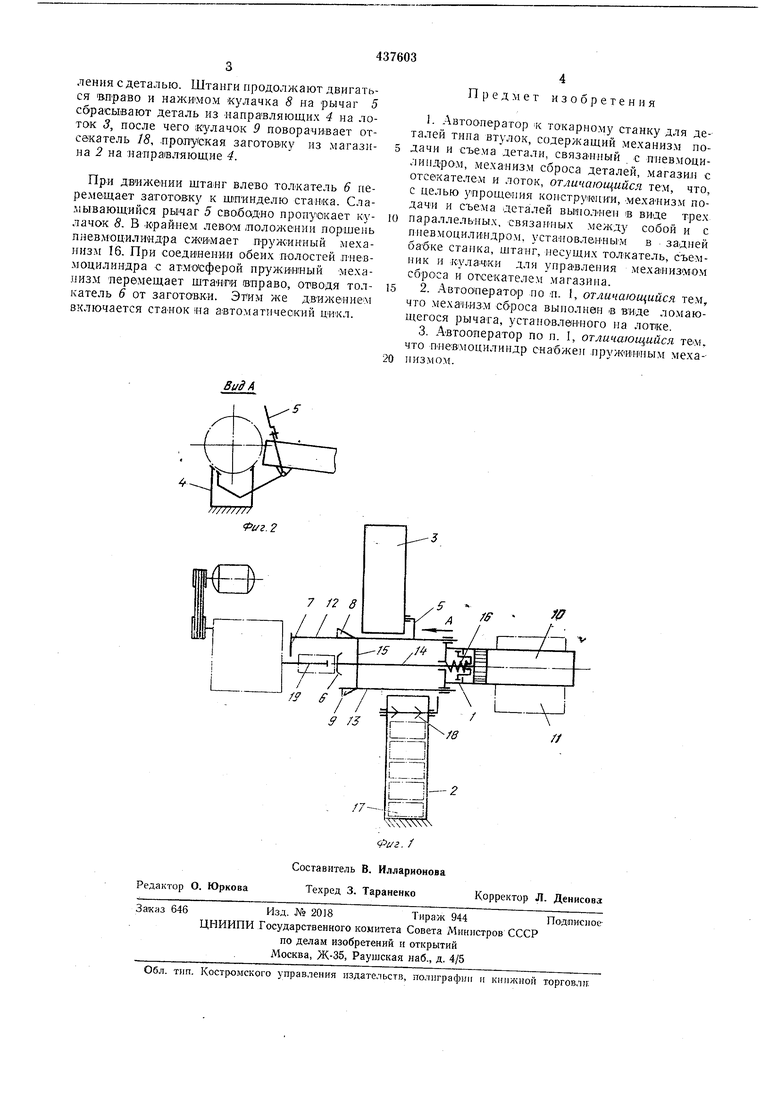
Изобретение относится к устройст1вам, устала.вливаемым на металлорежущих стайках для автоматизации загрузки и выгрузки деталей типа втулок. Известны автооператоры, устанавливаемые, например, на токарном ставке и содержащие мехаяиЗМ шодачи и съема деталей, механизм -сброса деталей, магазиш :С отсекателем и лоток. Предлагаемый автооператор отличается от известных тем, что меха-н.иэм подачи и съема деталей выполнен в виде трех параллельных, связанных между собой и с янеамоцилиндром шта1нг, несущих толкатель, съемннк и кулачки, управляющие механиамом сброса деталей, выполиениым в в-иде ломающегося рычага, установленного «а лотке, -и отсекателем магазина, три этом механизм подачи и съема деталей получает движение от янедамоцилиедра, установленного в задней бабке станка и снабжен1ного ируж ияйым Мехакизмом. На фиг. 1 представлен пре(длагаемый автооператор; на фиг. 2 - вид по стрелке Л на фиг. 1. Автооператор включает в себя механнаэд подачи и съема деталей 1, установленный на задней бабке станка, магазин 2, лоток 3, направляющие 4 для деталей, механизм сброса деталей со сламывающимся рычагом 5, установленные на станине стайка. Механизм передачи и съема деталей / выполнен в виде параллельных, жестко связанных между собой шланг, несущих толкатель 6, съемник 7, кулачки 8, 9 и соеди-не-н с приводом, папрн мер, пневмо.цили1ндром W, встроенным в заднюю бабку // станка. Съе-мпик 7 и кулачок 8 уста новлены -на штанге 12, имеющей байонетный лаз и соедипе«оюй со штангами 13 и 14 нлаикой 15. В1нутри пневмоцили-ндра 10 встроен пружинный мехачжзм 16. Магазин 2 с заготовками 17 снабжен отсекателем 18, взаимодействующие с кулачком 9 механизма подачи и съема деталей. Сламывающийся рычаг 5 механизма сброса деталей, взаимодействующих с кулачком 8, состоит из двух частей, соедииевных между собой с возможностью взаимного поворота, что обеспечивает срабатывани е механизма сброса при движении кулачка 8 в одном направлении и холостой ход при обратном его движении за счет сламывания рычага 5. Автооператор работает следующим образом. После окончания обработки дета.ти штанга 14 перемещается пнев-моцилиндром 10 «з -положения, изображенного на фит. 1, вправо, снимая деталь со штеинделя 19 ставка съемником 7. В момент нахождения детали против лотка 3 щтанга 12 поворачивается байо нетным назом вокруг своей оси, выводя съемник 7 из зацеп
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ДЕТАЛЕЙ12 | 1969 |
|
SU258003A1 |
| Автооператор | 1979 |
|
SU831516A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Автооператор к токарному станку | 1976 |
|
SU580085A1 |
| Загрузочно-разгрузочное устройство | 1977 |
|
SU667379A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Загрузочно-разгрузочное устройство | 1982 |
|
SU1068262A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО | 1997 |
|
RU2138368C1 |
