1
Изобретение относится к области машиностроения, в частности к конструкциям автооператоров для автоматизации загрузки и выгрузки металлорежущих станков и может быть применено при массовом и крупносерийном производстве деталей типа втулок.
Известны автооператоры, содержащие механическую руку, магазин и разгрузочный лоток 1. Известные автооператоры сложны по конструкции и трудоемки в изготовлении.
Известен автооиератор, содержащий механизм подачи и съема детали, установленный в направляющих с возможностью поступательного перемещения и связанный с силовым цилиндром, а также на1пра1вляюндне для детали 2.
Однако в известпом автооператоре механизм подачи и съема детали и направляющие для деталей все время находятся в зоне обработки, что сужает технологические возможности и снижает надежность автооператора.
Цель изобретения - расщирение технологических возможностей и повышение надежности.
Для этого в предлагаемом автооператоре механизм нодачи и съема детали сиабжен подпружиненной центрирующей оправкой, установленной с возможностью поступательного перемещения в корпусе механизма подачи и съсма, подпружиненными рычагами, шарнирно установленными на корпусе этого механизма, и распорным устройством, установленным на корпусе механизма и взаимодействующим с рычагами, причем корпус установлен в направляющих качения.
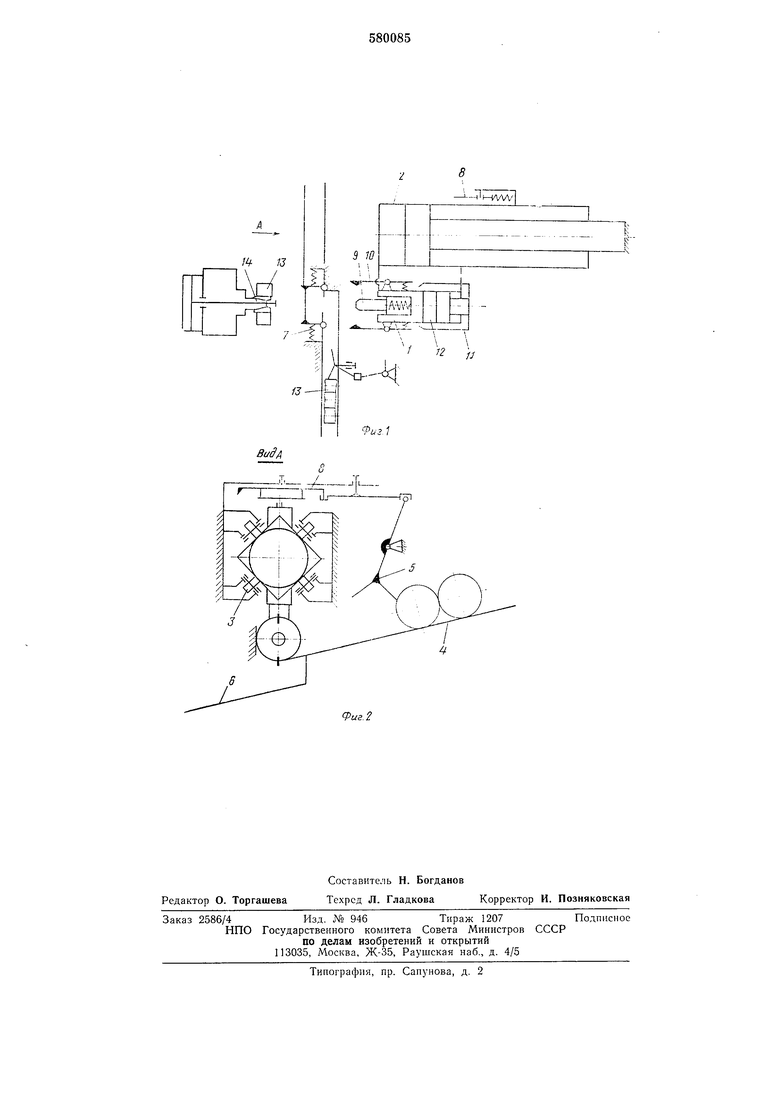
На фиг. 1 - нриншшиальная компоновочная схема предлагаемого автооператора; на фнг. 2 - вид по стрелке А на фиг. 1.
Предлагаемый автооператор содерл пт механизм 1 подачи и съема детали, силовой цилиндр 2, связанный с механнзмом подачи и съема детали, направляющие 3 указанного механизма, неподвижно установленные вместо задней бабкп станка, и жестко связанные
с этими направляющими магазнн 4, снабженный отсекателем 5, и лоток 6, на котором закреплен механпЗМ 7 сброса. Отсекатель магазина кинематически связан с механизмом подачи и съема деталей посредством рычажного механизма 8.
Механизм 1 содержит .подпружиненную центрирующую оправку 9, подпружиненные охватывающие рычаги 10, взаимодействующие с распорным устройством 11, и силовой цилиндр 12, связанный с распорным устройством. Деталь 13 при обработке закрепляется на шпинделе 14 передней бабкп станка.
Автооператор работает следующим образом.
После обработки детали механизм 1 подается цилиндром 2 из положения, показанного на фиг. 1, влево. В конце хода механизма 1 рычаги 10 охватывает деталь 13, оправка 9, упираясь в шпиндель 14, утапливается в корпусе механизма, а распорное устройство 11, перемендаемое цилиндром 12, замыкает рычаги 10, которые при этом зажимают деталь. При обратном движении цилиндра 2 обработанная деталь снимается со шпинделя 14, onpaiBKa выдвигается и входит в отверстие детали, после чего цилиндр 12 отводит распорное устройство 11 и рычаги 10 размыкаются.
При дальнейшем движении механизма 1 BnpaiBO, деталь 13 сбрасывается механизмом 7 сброса в лоток 6, после чего механизм 1 воздействует через рычажный механизм 8 на отсекатель 5, и последний пропускает очередную деталь из магазина 4 в положение загрузки. Механизм 1 повторно подается цилиндром 2 влево.
При этом оправка 9 входит в отверстие детали 13, находящ,ейся в положении загрузки и центрирует ее, а подпрулшненные рычаги 10 зажимают деталь и удерживают ее во время посадки на шпиндель. Когда центрирующая оправка 9 начинает утапливаться в корпусе механизма 1 деталь 13 переталкивается по ней на шпиндель 14. После закрепления детали 13 на шпинделе 14, механизм 1 отводится цилиндром 2 в крайнее правое положение, разжимая рычаги 10 и переключая, посредством рычажпого механизма 8, отсекатель 5 на исходпое положение. Таким образом, распорное устройство 11 работает только при съеме обработанной детали.
Формула изобретения
1.Автооператор к токарному станку для деталей типа -втулок, содержащий механизм ПОдачи и съема детали, корпус которого устаиовлен в неподвижных направляющих с возможностью поступательного перемещ-ения и связан с силовым цилиндром, отличающийся тем, что, с целью расширения технологических возможностей и повышения надежности, механизм подачи и съема детали снабжен подпружиненной центрируюшей оправкой, установленной с возможностью поступательного Перемещения в его корпусе, подпружиненными рычагами, шарнирно установленными на этом корпусе, и распорным устройством, расположенным также на корпусе механизма и взаимодействующим с рычагами.
2.Автооператор по п. 1, отличающийс я тем, что корпус механизма подачи и
съема детали установлен в направляющих качения.
Источники информации, принятые во внимание при экспертизе 1. АвторскоесвидетельствоСССР
191311, кл. В 23Q 7/04, 1963.
2. АвторскоесвидетельствоСССР
№ 437603, кл. В 23Q 7/04, 1972.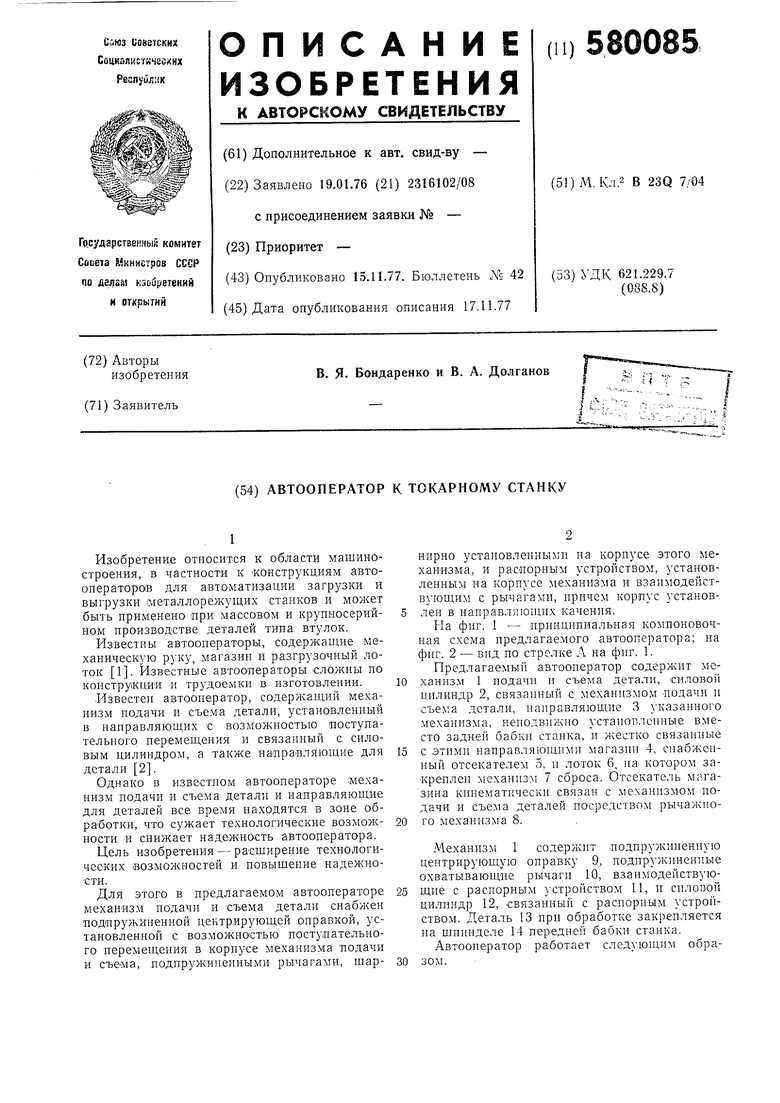
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Автооператор | 1979 |
|
SU831516A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Устройство съема и передачи деталей на токарном автомате | 1989 |
|
SU1712126A1 |
| Устройство для подачи деталей | 1988 |
|
SU1593907A1 |
| Устройство для подачи и удаления заготовок | 1976 |
|
SU564946A1 |
| Автооператор к сферошлифовальному станку | 1955 |
|
SU112457A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Загрузочное устройство к станку для обработки деталей | 1984 |
|
SU1310165A1 |
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1569175A1 |